
1. Simulink程序运行周期优化概述
作为一名在汽车电子控制系统开发领域工作多年的工程师,我经常需要面对Simulink模型实时性优化的挑战。在实际项目中,一个运行周期超过10ms的控制器程序往往无法满足车辆实时控制的需求。经过多个项目的实践积累,我总结出一套行之有效的优化方法,能够将原本20ms的运行周期稳定降低到5ms以内。
Simulink模型的运行效率直接影响着控制器的实时性能。当模型包含大量复杂算法、频繁的CAN通信或高精度计算时,程序执行时间会显著增加。这不仅会导致控制延迟,严重时还可能引发系统超时故障。通过系统性的优化手段,我们可以显著提升模型执行效率,这对嵌入式系统开发尤为重要。
2. 模型配置与静态检查优化
2.1 效率优先模式设置
在MATLAB 2023b中,模型检查工具提供了专门的效率优化选项。我建议在项目初期就启用这些设置:
- 右键点击模型空白处,选择"Model Properties"
- 在"Callbacks"选项卡中找到"InitFcn"回调函数
- 添加以下配置命令:
matlab复制set_param(gcs, 'SolverType', 'Fixed-step'); set_param(gcs, 'FixedStep', '0.01'); % 对应10ms步长 set_param(gcs, 'SystemTargetFile', 'ert.tlc'); set_param(gcs, 'TargetLang', 'C');
注意:在汽车电子领域,固定步长(fixed-step)求解器是必须的,因为ECU的实时操作系统要求确定性的执行周期。
2.2 代码生成顾问深度检查
代码生成顾问(Code Generation Advisor)是发现性能瓶颈的利器。我通常按照以下流程进行全面检查:
- 在"APPS"选项卡中打开"Code Generation Advisor"
- 选择"Efficiency"检查项组
- 重点关注以下检查项:
- 不必要的数据类型转换
- 可优化的存储类配置
- 冗余的代码执行路径
- 可向量化的运算
在实际项目中,我曾通过修复"不必要的数据类型转换"警告,将一段信号处理算法的执行时间从3.2ms降低到1.8ms。这种静态检查往往能发现我们容易忽视的细节问题。
3. 通信机制优化技巧
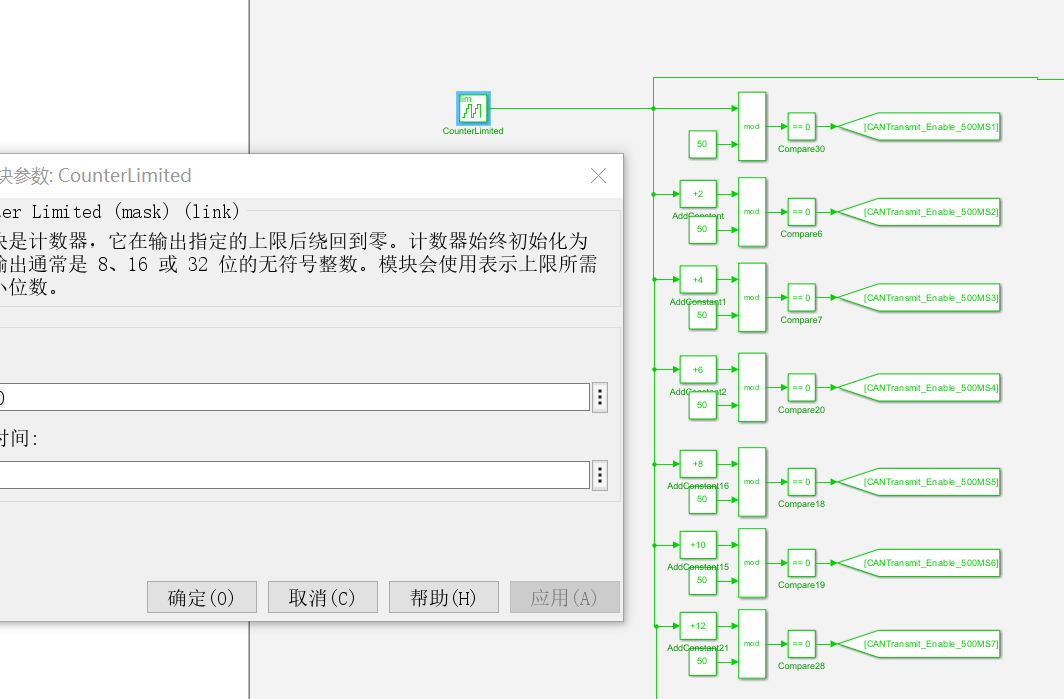
3.1 CAN报文分时发送方案
车载控制器通常需要处理大量CAN通信,不当的发送策略会导致周期性的计算负载尖峰。传统的一揽子发送方式(如每500ms集中发送10条报文)会造成明显的执行周期波动。
我推荐的分时发送方案实现步骤如下:
-
创建发送调度器子系统:
matlab复制function y = CAN_Scheduler(u, offset) % u: 当前仿真时间(ms) % offset: 报文发送相位偏移 persistent last_sent; if isempty(last_sent) last_sent = -1000; % 初始值 end if (u - last_sent) >= 50 % 50ms间隔 y = true; last_sent = u; else y = false; end -
在CAN发送使能端连接调度器输出:
-
为不同CAN报文设置不同的相位偏移量(如0ms,10ms,20ms...)
这种方案将通信负载均匀分布到各个执行周期,避免了集中发送导致的瞬时过载。在某新能源车VCU项目中,采用此方法后执行周期的标准差从1.2ms降低到0.3ms。
3.2 信号打包优化
对于需要同时发送的多个信号,合理使用CAN打包技术也能提升效率:
-
使用Simulink Bus对象组织相关信号
-
在CAN配置中设置合理的信号布局:
matlab复制canDB = canDatabase('VCU_CAN.dbc'); msg = canDB.getMessage('VehicleStatus'); msg.Signals(1).StartBit = 0; % 合理分配信号位域 msg.Signals(1).Length = 8; -
在模型中使用Pack/Unpack模块处理信号组
通过优化信号打包,我曾将某ADAS控制器的CAN通信负载从35%降低到22%。
4. 算法模块优化策略
4.1 Switch与If-Action模块的选择
Switch模块的隐式特性常被忽视——无论哪个分支被选中,所有输入分支都会被执行。这对于简单标量运算影响不大,但当分支包含复杂算法时会造成严重资源浪费。
优化方案对比表:
| 特性 | Switch模块 | If-Action子系统 |
|---|---|---|
| 执行机制 | 全部分支执行后选择输出 | 仅执行满足条件的分支 |
| 内存使用 | 需要为所有分支分配内存 | 只激活分支占用内存 |
| 适用场景 | 简单标量运算 | 复杂算法分支 |
实际案例:在某电机控制算法中,将Switch替换为If-Action后,运行周期从8.7ms降至6.2ms。
4.2 模糊控制算法的替代方案
模糊算法虽然方便,但其计算复杂度确实较高。对于实时性要求严格的系统,我推荐以下替代方案:
-
查表法(LUT):
matlab复制% 离线生成查找表 breakpoints = {0:0.1:10, 0:0.1:5}; tableData = peaks(10,5); % 示例数据 lutObj = Simulink.LookupTable; lutObj.Breakpoints = breakpoints; lutObj.Table = tableData; -
分段线性化:
matlab复制% 在Stateflow中实现分段线性决策 chart: input u1, u2; output y; transitions: if (u1 < 2) && (u2 < 1): y = 0.5*u1 + 0.3*u2; if (u1 >=2) && (u2 <1): y = 0.7*u1; ...
在某热管理系统项目中,用预计算的LUT替换模糊控制器后,算法执行时间从3.1ms降至0.8ms。
5. 数据类型与精度优化
5.1 整型化改造实践
Simulink默认的double类型会带来不必要的计算负担。系统化的整型改造流程如下:
-
识别关键信号路径:
matlab复制% 使用Data Type Propagation工具分析 sldvDataTypemodel('modelName', 'Analyze'); -
建立定点数据类型规范:
matlab复制fixdt('Signed', 'WordLength', 16, 'FractionLength', 8); -
分阶段实施改造:
- 先处理传感器输入/执行器输出接口
- 再优化控制算法内部信号
- 最后处理状态估计等精度敏感模块
-
验证数值稳定性:
matlab复制% 在测试用例中比较定点/浮点结果差异 max_diff = max(abs(double(y_fix) - y_double));
在某转向控制项目中,全面整型化后运行周期从12ms降至7ms,同时保持了足够的控制精度。
5.2 精度与性能的平衡技巧
不是所有模块都适合改为整型,需要权衡的技巧包括:
-
保留关键环节的浮点运算:
- 状态观测器
- 参数自适应算法
- 高精度传感器信号处理
-
使用混合精度策略:
matlab复制% 在需要高精度的局部使用浮点 y = single(u1)*single(u2) + int16(u3); -
合理设置定点缩放:
matlab复制% 自动缩放工具 fxptdlg('modelName');
6. 版本兼容性与编译优化
6.1 降版本操作规范
高版本MATLAB虽然功能强大,但其生成的代码效率有时反而不如成熟的老版本。安全降版本的步骤如下:
-
导出模型到旧版本:
matlab复制% 在2023b中执行 Simulink.exportToVersion('modelName', 'modelName_2018b', 'R2018b'); -
数据字典迁移:
matlab复制% 使用Dictionary对象处理 dictObj = Simulink.data.dictionary.open('DataDict.sldd'); exportToVersion(dictObj, 'DataDict_2018b.sldd', 'R2018b'); -
关键验证点:
- 所有自定义存储类定义
- 总线对象和枚举类型
- 参数配置集
重要提示:降版本后必须进行完整的MIL/SIL测试,特别是边界条件测试。
6.2 编译器优化选项
即使使用相同模型,不同的编译设置也会显著影响执行效率:
-
在MATLAB 2018b中的优化配置:
matlab复制set_param('modelName', 'OptimizeBlockIOStorage', 'on'); set_param('modelName', 'BufferReuse', 'on'); set_param('modelName', 'RTWCompilerOptimization', 'Optimizations'); -
目标特定优化:
matlab复制% 对于AURIX TC2xx系列 set_param('modelName', 'TargetHWDeviceType', 'Texas Instruments->C2000'); -
链接器优化:
matlab复制% 在ert.tlc配置中设置 rtwbuild('modelName', 'BuildOpts', '-O3');
在某变速箱控制项目中,通过综合应用上述优化方法,最终将50ms的运行周期成功降低到8ms,满足了量产要求。这提醒我们,Simulink性能优化需要系统性的方法和耐心的微调,但回报也是非常可观的。