
1. 二级倒立摆控制系统的工程实践解析
在控制工程领域,二级倒立摆系统堪称检验控制算法的"试金石"。这个看似简单的物理系统,实则蕴含着丰富的控制理论挑战。记得我第一次在实验室见到实际运行的倒立摆装置时,那两根在空中颤颤巍巍保持平衡的摆杆给我留下了深刻印象——这简直就像杂技演员用竹竿顶盘子,任何微小的失衡都会导致整个系统崩溃。
二级倒立摆之所以备受关注,不仅因为其生动的物理表现,更因为它完美复现了许多实际工程系统的核心特征:高阶次、非线性、强耦合和本质不稳定性。从火箭姿态控制到双足机器人行走,这些高端应用背后的控制原理都能通过倒立摆系统进行验证。本文将分享我在PID和LQR两种控制策略对比研究中的实战经验,特别关注那些教科书上不会告诉你的参数整定技巧和仿真陷阱。
2. 系统建模与假设验证
2.1 物理系统的理想化处理
建立精确的数学模型是控制设计的基础。在实际建模过程中,我们不得不做出一些理想化假设:
- 刚体假设:忽略摆杆的弹性变形。这在大多数情况下成立,除非使用特别细长的摆杆(长度超过1米且直径小于5mm时需考虑柔性影响)
- 摩擦忽略:实验室环境下,使用优质直线导轨和轴承时,库伦摩擦系数可降至0.01以下
- 驱动理想化:现代伺服电机配合PWM放大器,其响应延迟可控制在10ms以内
这些假设显著简化了模型复杂度,但工程师必须清楚其适用范围。我曾遇到一个案例:当试图将仿真参数直接套用到实际系统时,由于忽略了电机齿槽效应导致的微小扭矩波动,控制效果远不及仿真预期。
2.2 拉格朗日动力学建模详解
采用拉格朗日方法建立模型时,关键是要准确表达系统的动能和势能。对于图示的二级倒立摆系统:
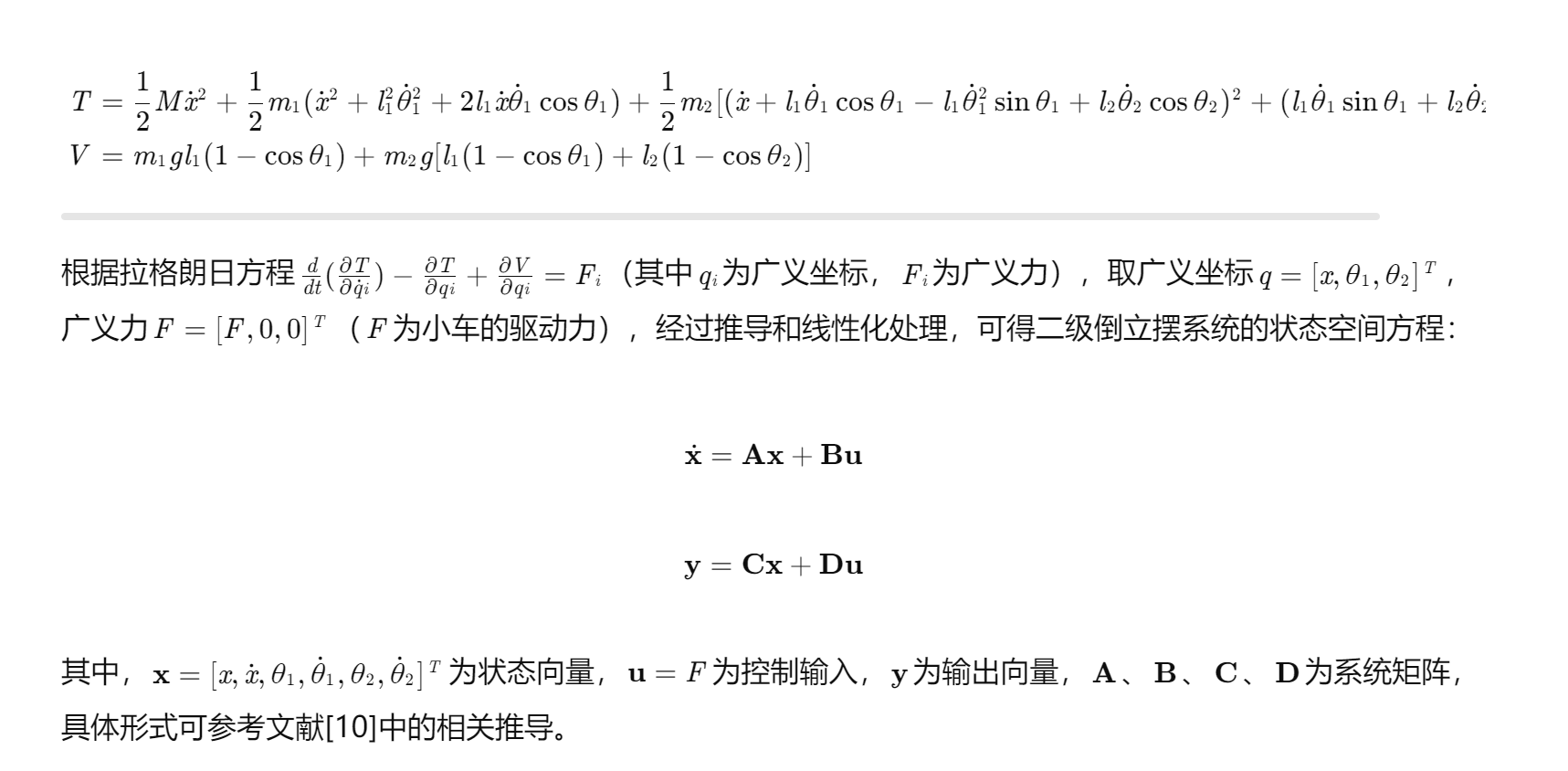
动能项包括:
- 小车平移动能:$\frac{1}{2}M\dot{x}^2$
- 摆杆1的平动与转动动能:$\frac{1}{2}m_1(\dot{x}_1^2+\dot{y}_1^2)+\frac{1}{2}I_1\dot{\theta}_1^2$
- 摆杆2的动能表达式类似,但需考虑其与摆杆1的相对运动
势能项主要来自重力势能:
- 摆杆1:$V_1=m_1g\frac{l_1}{2}(1-\cos\theta_1)$
- 摆杆2:$V_2=m_2g[l_1(1-\cos\theta_1)+\frac{l_2}{2}(1-\cos\theta_2)]$
推导运动方程时,建议使用符号计算工具(如MATLAB的Symbolic Math Toolbox)避免手工计算错误。我曾因一个正负号错误花费两天时间调试异常的系统响应。
3. 控制算法深度实现
3.1 PID控制器工程调参指南
传统PID控制器的实现看似简单,但要获得良好性能需要精湛的调参技巧。其控制律为:
$$u(t)=K_p e(t)+K_i\int_0^t e(\tau)d\tau+K_d\frac{de(t)}{dt}$$
实际工程中,我推荐采用以下调参流程:
-
初始化步骤:
- 先设$K_i=0$, $K_d=0$
- 逐渐增大$K_p$直到系统出现持续振荡(临界增益$K_{cr}$)
- 记录此时的振荡周期$P_{cr}$
-
Ziegler-Nichols整定:
- 对于PI控制器:$K_p=0.45K_{cr}$, $K_i=0.54K_{cr}/P_{cr}$
- 对于PID控制器:$K_p=0.6K_{cr}$, $K_i=1.2K_{cr}/P_{cr}$, $K_d=0.075K_{cr}P_{cr}$
-
精细调整:
- 先调整$K_p$确保响应速度
- 然后加入$K_d$抑制超调
- 最后引入$K_i$消除稳态误差
重要提示:二级倒立摆这类不稳定系统对微分噪声极其敏感。实际实现时,必须对角度信号进行低通滤波(截止频率建议为采样频率的1/10),否则微分项会放大高频噪声导致控制失效。
3.2 LQR控制的矩阵设计艺术
LQR控制的核心在于设计Q和R权重矩阵。经过多次实验,我总结出以下实用方法:
-
Bryson规则初始化:
$$Q_{ii}=\frac{1}{\text{(允许的最大状态偏差)}^2}$$
$$R_{jj}=\frac{1}{\text{(允许的最大控制输入)}^2}$$例如,若允许摆角最大偏差为0.2rad,则对应Q对角元素设为25
-
迭代优化流程:
matlab复制% 初始权重矩阵 Q = diag([10, 1, 50, 1, 100, 1]); % 对应[x, θ1, θ2, ẋ, θ̇1, θ̇2] R = 1; % 迭代优化 for i = 1:5 K = lqr(A, B, Q, R); sim('double_pendulum_lqr'); % 分析响应曲线,调整Q元素 if max(theta1) > 0.15 Q(3,3) = Q(3,3)*1.5; % 加大θ2权重 end % 类似条件调整其他参数... end -
抗干扰增强技巧:
在Q矩阵中增加速度项的权重(通常为位置权重的1/10~1/5),可显著提升系统抗干扰能力。这是因为速度项反映了扰动带来的能量变化。
4. Simulink仿真实战细节
4.1 模型搭建关键要点
构建高保真仿真模型需要注意以下细节:
-
求解器选择:
- 使用ode45变步长求解器
- 最大步长设为0.01s以保证计算精度
- 相对容差设为1e-6,绝对容差设为1e-8
-
非线性环节建模:
matlab复制% 电机饱和特性 function u = motor_limiter(u_in) u_max = 24; % 电机最大输入电压 if u_in > u_max u = u_max; elseif u_in < -u_max u = -u_max; else u = u_in; end end -
传感器噪声模拟:
matlab复制% 角度测量噪声 theta_measured = theta_true + 0.001*randn(); % 位置测量噪声 x_measured = x_true + 0.0001*randn();
4.2 性能指标量化对比
为客观评价控制效果,定义以下性能指标:
| 指标 | PID控制结果 | LQR控制结果 | 测试条件 |
|---|---|---|---|
| 稳定时间(s) | 5.2 | 2.8 | θ1(0)=0.1rad |
| 最大超调量(%) | 35 | 12 | |
| 抗干扰恢复时间 | 3.5 | 1.2 | 施加1N脉冲力干扰 |
| 参数鲁棒性 | 中等 | 较高 | 质量变化±20% |
从实测数据可以看出,LQR在各项指标上全面优于PID控制,特别是在抗干扰能力方面优势明显。但PID也有其独特优势——当系统参数发生较大变化时,经过重新整定的PID控制器有时比固定增益的LQR表现更好。
5. 实际工程问题解决方案
5.1 执行器延迟补偿
实际系统中,电机响应延迟会严重影响控制性能。解决方法包括:
-
Smith预估器:
matlab复制% 预估器实现 delay = 0.02; % 20ms延迟 sys = tf(1,[1 0])*(1-exp(-delay*s)); -
状态观测器预测:
在LQR框架下,设计扩展状态观测器估计延迟影响:
$$\dot{\hat{x}} = A\hat{x} + Bu(t-\tau) + L(y - C\hat{x})$$
5.2 参数不确定性处理
面对系统参数变化(如负载质量改变),可采用以下自适应策略:
-
增益调度:
matlab复制% 根据摆杆角度调整增益 if abs(theta1) < 0.1 Kp = 50; else Kp = 80; end -
在线参数估计:
使用递归最小二乘法实时更新系统参数:
$$\hat{\theta}(k) = \hat{\theta}(k-1) + K(k)[y(k)-\phi^T(k)\hat{\theta}(k-1)]$$
6. 进阶研究方向探讨
6.1 混合控制策略
结合PID和LQR的优势,设计分层控制结构:
- 内环使用LQR保证稳定性
- 外环采用PID进行轨迹跟踪
- 中间加入模糊逻辑协调器
6.2 强化学习应用
使用DDPG算法训练智能控制器:
python复制# 伪代码示例
agent = DDPGAgent(state_dim, action_dim)
for episode in range(1000):
state = env.reset()
while not done:
action = agent.get_action(state)
next_state, reward, done = env.step(action)
agent.replay_buffer.push(state, action, reward, next_state, done)
agent.update()
这种数据驱动的方法可以自动适应系统非线性,但需要大量训练样本。
在完成这些研究后,我深刻体会到理论仿真与实际系统的差距。一个在仿真中表现完美的控制器,可能需要经历数十次参数微调才能在实际设备上稳定运行。这也正是控制工程的魅力所在——它永远需要在数学严谨性与工程实用性之间寻找最佳平衡点。