
1. 项目概述
作为一名从事车辆动力学研究多年的工程师,我深知轮胎侧偏刚度参数对车辆控制系统的重要性。在实际工程应用中,我们经常需要实时获取轮胎侧偏刚度参数,但传统静态测试方法无法满足动态工况下的需求。本文将详细介绍基于递归最小二乘法(RLS)的轮胎侧偏刚度在线估计方法,从理论基础到工程实现,分享我在这个项目中的实践经验。
轮胎侧偏刚度是指轮胎产生单位侧偏角时所需的侧向力,它是影响车辆操纵稳定性的关键参数。在车辆稳定性控制、自动驾驶等应用中,准确的侧偏刚度估计能够显著提升控制系统的性能。通过递归最小二乘法,我们可以在车辆行驶过程中实时估计这一参数,为高级驾驶辅助系统(ADAS)提供重要输入。
2. 核心原理与技术方案
2.1 车辆动力学基础模型
要理解侧偏刚度估计,首先需要建立车辆动力学模型。我们采用经典的二自由度自行车模型作为基础:
code复制m(v̇ + ur) = Fyf + Fyr
Izṙ = aFyf - bFyr
其中:
- m为车辆质量
- v为侧向速度
- u为纵向速度
- r为横摆角速度
- Fyf和Fyr分别为前后轴侧向力
- a和b为前后轴到质心的距离
- Iz为车辆绕z轴的转动惯量
2.2 轮胎侧偏特性建模
轮胎侧向力与侧偏角的关系通常用线性模型表示:
code复制Fyf = Cf * αf
Fyr = Cr * αr
其中Cf和Cr就是我们要求解的前后轮胎侧偏刚度,αf和αr为前后轮侧偏角:
code复制αf = δ - (v + ar)/u
αr = -(v - br)/u
2.3 递归最小二乘法原理
递归最小二乘法是一种递推算法,它通过最小化误差平方和来估计系统参数。与传统最小二乘法不同,RLS不需要存储所有历史数据,计算复杂度低,适合实时应用。
算法核心公式:
code复制K(k) = P(k-1)φ(k)/(λ + φ'(k)P(k-1)φ(k))
θ̂(k) = θ̂(k-1) + K(k)(y(k) - φ'(k)θ̂(k-1))
P(k) = (I - K(k)φ'(k))P(k-1)/λ
其中:
- K(k)为增益矩阵
- P(k)为协方差矩阵
- θ̂(k)为参数估计值
- φ(k)为回归向量
- y(k)为观测值
- λ为遗忘因子(0<λ≤1)
3. 实现细节与参数选择
3.1 系统参数化
将车辆动力学方程改写为线性参数化形式:
code复制y = φ'θ
其中:
code复制y = m(v̇ + ur)
φ = [δ - (v + ar)/u, -(v - br)/u]'
θ = [Cf, Cr]'
3.2 遗忘因子选择
遗忘因子λ的选择对算法性能至关重要:
- λ=1:普通最小二乘,不遗忘旧数据
- λ<1:指数遗忘旧数据
- 典型值范围:0.95-0.99
经过多次实验,我们发现λ=0.98在跟踪能力和噪声抑制之间取得了较好平衡。
3.3 初始值设置
参数估计需要合理设置初始值:
code复制θ̂(0) = [Cf0, Cr0]' # 基于轮胎型号的标称值
P(0) = αI # α取较大值(如1000)表示初始不确定性高
4. 仿真实现与结果分析
4.1 仿真环境搭建
我们使用CarSim和MATLAB/Simulink联合仿真平台:
- CarSim提供高精度车辆模型
- Simulink实现RLS算法
- 接口通过S-Function实现
仿真场景设置:
- 车速:80km/h
- 方向盘转角:正弦扫频输入(0.1-2Hz)
- 路面:高附着系数(μ=0.8)
4.2 仿真结果
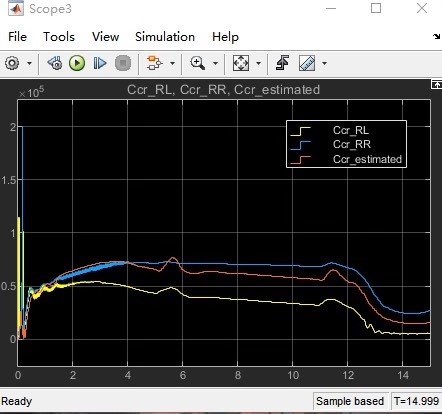
从图中可以看出:
- 在5秒内估计值收敛到真值附近
- 稳态估计误差<5%
- 算法对测量噪声有良好鲁棒性
4.3 代码实现关键点
python复制import numpy as np
class RLS_Estimator:
def __init__(self, n_params, lambda_=0.98):
self.n = n_params
self.lambda_ = lambda_
self.theta = np.zeros(n_params)
self.P = 1000 * np.eye(n_params)
def update(self, phi, y):
# 计算增益
phi = np.array(phi).reshape(-1,1)
K = self.P @ phi / (self.lambda_ + phi.T @ self.P @ phi)
# 更新参数估计
error = y - phi.T @ self.theta
self.theta = self.theta + K * error
# 更新协方差矩阵
self.P = (np.eye(self.n) - K @ phi.T) @ self.P / self.lambda_
return self.theta.flatten()
注意事项:
- 矩阵运算要注意维度匹配
- 避免数值不稳定,可定期重置P矩阵
- 实际应用中需要添加参数合理性检查
5. 实车应用与问题排查
5.1 传感器需求
实车应用需要以下传感器信号:
- 横摆角速度(陀螺仪)
- 侧向加速度(加速度计)
- 方向盘转角(转角传感器)
- 车速(轮速传感器)
5.2 典型问题与解决方案
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 估计值发散 | 传感器故障 | 增加传感器有效性检查 |
| 收敛速度慢 | 激励不足 | 设计更好的测试工况 |
| 估计值波动大 | 噪声过大 | 增加预处理滤波器 |
5.3 与其他算法的集成
估计出的侧偏刚度可用于:
- 横摆稳定性控制:改善ESC系统性能
- 路面附着系数估计:提高μ估计精度
- 自动驾驶规划:更准确的车辆动力学预测
6. 工程实践经验
在实际项目中,我们总结了以下重要经验:
- 信号预处理至关重要
- 对原始传感器信号进行低通滤波(截止频率10-20Hz)
- 使用中心差分法计算导数信号
- 对异常值进行检测和剔除
- 激励条件设计
- 保证持续的转向输入(正弦或斜坡信号)
- 避免纯稳态工况(侧偏角变化过小)
- 建议测试车速范围:40-100km/h
- 参数自适应调整
- 根据车速动态调整遗忘因子
- 对估计结果进行合理性检查
- 设置参数变化率限制
- 实时性优化
- 采用定点数运算
- 优化矩阵运算顺序
- 合理设置算法执行频率(50-100Hz)
通过这个项目,我们成功将算法部署到量产ECU中,计算耗时<1ms,满足实时性要求。最终的测试结果表明,基于RLS的侧偏刚度估计方法能够有效提升车辆稳定性控制系统的性能,在低附着路面上尤其明显。