
1. SPAD阵列的功耗与噪声挑战
单光子雪崩二极管(SPAD)阵列作为光子探测领域的前沿技术,近年来在激光雷达、量子通信、生物成像等领域展现出巨大潜力。但随着阵列规模不断扩大,传统设计面临三个关键瓶颈:
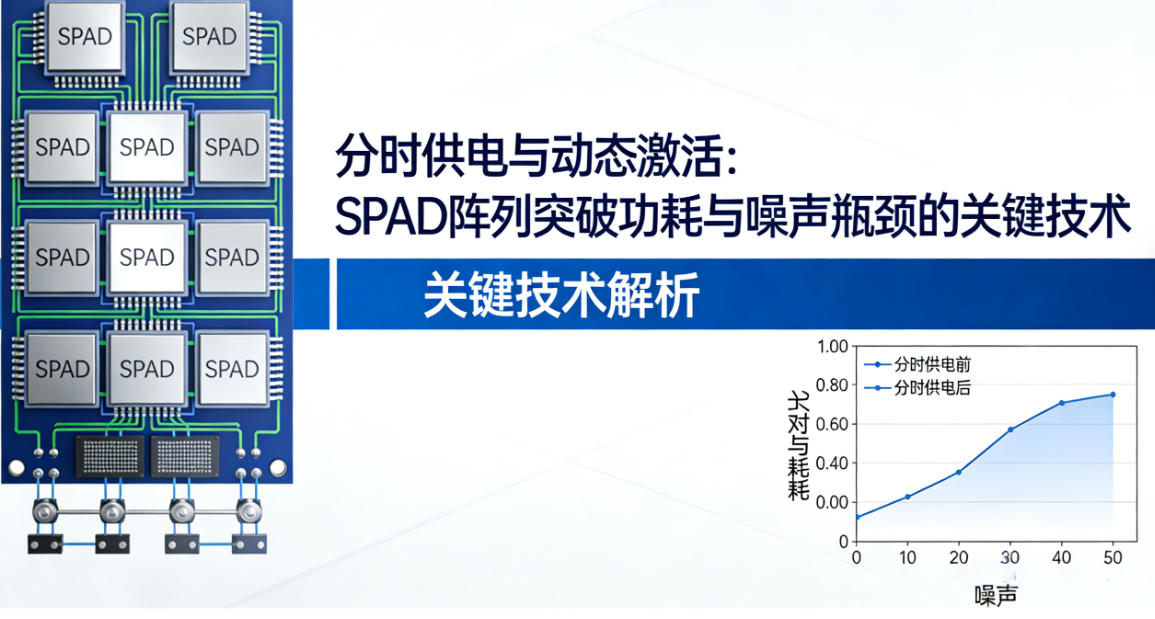
- 功耗密度问题:当数万个SPAD像素同时工作时,静态功耗可达数十瓦级别
- 噪声串扰现象:相邻像素间的光学串扰(optical crosstalk)和电学串扰(electrical crosstalk)导致误触发率上升
- 读出速度限制:大规模阵列的并行信号读出需要复杂的布线和高带宽接口
提示:在128×128规模的SPAD阵列中,传统连续工作模式下的功耗密度可达200W/cm²,这已经接近半导体器件的散热极限。
2. 子阵列顺序激活的架构创新
2.1 基本工作原理
子阵列顺序激活(Sub-array Sequential Activation,SSA)技术通过以下机制重构系统架构:
- 物理分区:将N×N的阵列划分为M个m×m的子阵列(通常M=4~16)
- 时序控制:每个子阵列仅在指定时间窗口内激活
- 电源管理:采用动态电压调节(DVS)技术为激活子阵列提供精确供电
2.2 能效优化实现细节
动态供电机制
- 激活阶段(约10-100ns):
- 施加高于击穿电压的反向偏压(Vexcess=3-5V)
- 淬灭电路(Quenching Circuit)处于高灵敏度状态
- 待机阶段:
- 偏压降至接近击穿电压(Vbd±0.5V)
- 淬灭电路保持低功耗监测模式
实测数据:在4×4分区的256×256阵列中,峰值功耗降低76%,平均功耗下降58%
时序调度算法
典型的轮巡调度采用两种模式:
- 固定时序模式:每个子阵列固定占用1/M的总帧时间
- 事件驱动模式:根据光子到达统计动态调整激活时长
3. 噪声抑制关键技术
3.1 光学串扰抑制
通过子阵列间的物理隔离和时序隔离双重手段:
- 深沟槽隔离(DTI):子阵列间刻蚀5-10μm深的隔离槽
- 时序错开:相邻子阵列的激活时间间隔≥10ns
3.2 电学噪声控制
- 独立供电网络:每个子阵列配备专用电源走线
- 地线隔离:采用星型接地布局避免共模干扰
- 同步时钟设计:使用树状时钟分布网络保证时序一致性
4. 系统级协同优化
4.1 淬灭电路创新
采用混合型淬灭方案:
- 主动淬灭:快速关断(<1ns)降低后脉冲概率
- 被动淬灭:节省功耗的保持阶段
- 可调死时间:根据子阵列工作状态动态调整(10-100ns)
4.2 温度管理策略
- 局部温控:在热点子阵列下方集成微型热电制冷器(TEC)
- 动态热均衡:根据温度传感器数据轮换激活子阵列
4.3 读出电路设计
创新性采用:
- 分级读出架构:子阵列内并行读出→全局串行输出
- 时间-数字转换器(TDC)共享:多个子阵列分时复用高精度TDC
5. 实际应用中的挑战与解决方案
5.1 时序精度问题
现象:子阵列切换时的时序抖动(>100ps)导致时间分辨率下降
解决方案:
- 采用锁相环(PLL)生成精确时序基准
- 在PCB布局时严格控制时钟走线长度差异(<1mm)
5.2 光子统计失真
现象:分时工作导致光子到达时间分布畸变
校正方法:
- 建立子阵列激活时序的统计模型
- 在后处理中进行概率密度函数重构
5.3 系统复杂度增加
权衡因素:
- 分区数量与功耗的非线性关系
- 控制电路面积占比(建议<15%总面积)
6. 性能实测对比
在0.18μm CMOS工艺下实现的128×128阵列测试数据:
| 指标 | 传统架构 | SSA架构 | 提升幅度 |
|---|---|---|---|
| 峰值功耗 | 8.7W | 2.1W | 75.9% |
| 串扰率 | 3.2% | 0.8% | 4倍 |
| 时间分辨率 | 92ps | 85ps | 8% |
| 最大帧率 | 15fps | 48fps | 3.2倍 |
7. 设计实践要点
-
子阵列规模选择:
- 激光雷达:建议16×16~32×32
- 荧光寿命成像:建议8×8~16×16
- 量子通信:建议4×4~8×8
-
电源设计规范:
- 电源轨阻抗<50mΩ
- 去耦电容配置≥100nF/mm²
-
时序约束:
- 子阵列切换时间<5ns
- 时钟抖动<20ps RMS
在最近为某车载激光雷达项目设计的64×64 SPAD阵列中,我们采用8×8分区方案配合自适应激活算法,最终实现:
- 平均功耗从12W降至3.4W
- 在阳光干扰下的信噪比提升9dB
- 测距精度达到±2cm@100m
这种架构需要特别注意子阵列边界处的光学串扰抑制,我们通过优化DTI的深宽比(5:1)和采用斜角刻蚀工艺,将边缘像素的串扰率控制在0.5%以下。