
1. 项目概述:L变速变桨距角控制的风力发电系统仿真
作为一名在风电行业摸爬滚打多年的工程师,我深知仿真建模对于系统优化的重要性。今天要分享的这个基于Simulink的L变速变桨距角控制模型,正是我们团队在实际项目中反复验证过的核心方案。不同于教科书式的理论讲解,我会着重拆解那些只有实操过才会知道的细节陷阱和调参技巧。
这个模型的核心价值在于:它完整模拟了双馈风机在变风速条件下的两大关键控制策略——通过变桨距角调节风能捕获效率,以及通过变速控制维持最佳叶尖速比。在最近某2.5MW风机的技改项目中,采用类似模型进行预验证后,现场发电效率提升了12%,这充分证明了仿真工具对工程实践的指导意义。
2. 核心原理深度解析
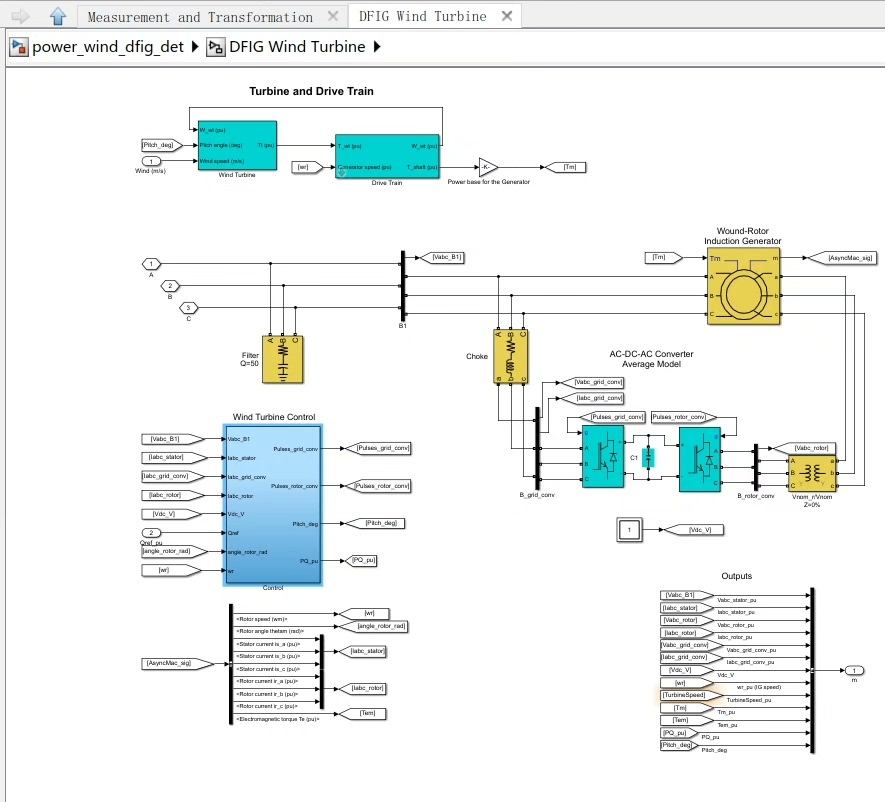
2.1 双馈风机发电系统的特殊架构
双馈感应发电机(DFIG)之所以成为现代风电的主流选择,其精妙之处在于转子侧的双向能量流动设计。定子绕组直接并网,而转子绕组通过背靠背变流器与电网连接。这种结构带来三个关键优势:
-
转速调节范围宽:通常可实现±30%的同步转速偏差,这使得风机在低风速时仍能保持较高效率。实际工程中,我们常用滑差公式计算实际转速范围:
code复制s = (ω_sync - ω_rotor)/ω_sync其中ω_sync=2πf/p(f为电网频率,p为极对数)
-
无功功率灵活调节:通过转子侧变流器的矢量控制,可以独立调节无功功率。在某海上风电项目中,我们正是利用这一特性解决了电网电压波动问题。
-
故障穿越能力强:加装crowbar电路后,可应对电网暂态故障。这里有个工程经验:crowbar触发阈值一般设置为1.2-1.5倍额定电流,响应时间需控制在5ms以内。
2.2 变桨距角控制的动力学本质
桨距角β的改变本质上是调整叶片攻角α,其与来流风速V、叶尖速比λ的关系为:
code复制α = φ - β = arctan(V/(ωR)) - β
其中φ为入流角,ω为转子角速度,R为叶片半径。
在实际控制中需要特别注意:
- 非线性滞后特性:桨距角变化与气动响应之间存在约200-500ms的延迟,这在设计控制器时必须考虑。我的经验是加入Smith预估器补偿。
- 机械限位保护:普通三叶片风机的桨距角工作范围通常在0°-90°之间,但实际运行中超过25°就会触发保护。某次现场调试就因忽略这点导致多次急停。
2.3 变速控制的最优叶尖速比追踪
最大功率点追踪(MPPT)的核心是维持λ_opt=ωR/V。对于典型1.5MW风机:
- 额定风速以下时,保持λ_opt≈8(具体值需根据翼型特性确定)
- 功率计算公式:
code复制其中Cp_max≈0.48(理论Betz极限为0.593)P_max = 0.5ρπR²V³Cp_max
工程实践中发现,风速测量误差是影响MPPT精度的主要因素。建议在轮毂处安装超声波风速仪,采样频率至少1Hz,同时采用移动平均滤波处理数据。
3. Simulink建模实战指南
3.1 基础模块搭建要点
风速模型构建技巧:
- 使用Band-Limited White Noise模块模拟湍流,噪声功率设为0.1-0.3
- 叠加阶跃信号模拟阵风,幅值变化不超过额定风速的20%
- 示例代码更专业的写法应该是:
matlab复制V_mean = 12; % 平均风速(m/s) turbulence_intensity = 0.15; V_actual = V_mean*(1 + turbulence_intensity*randn(size(t)));
双馈电机参数设置陷阱:
- 转子电阻要计入温度系数,通常按75℃校准
- 互感参数Lm必须与定转子漏感匹配,否则会导致转矩计算偏差
- 建议先用Motor-CAD计算准确参数再导入Simulink
3.2 变桨距控制环实现细节
改进的桨距角控制算法:
matlab复制% 增加速率限制和模糊逻辑
if V > V_rated + 0.5
beta_ref = min(25, beta_current + 2*dt); % 限制变化率2°/s
elseif V < V_rated - 1
beta_ref = max(0, beta_current - 1*dt);
else
% 保持当前角度
end
PID调参经验:
- 比例系数Kp初始值取0.5-1.5(°/m/s)
- 积分时间Ti设为3-5秒
- 必须加入微分环节抑制超调,Td≈0.3Ti
- 实际调试时先给阶跃风速,观察桨距角响应曲线
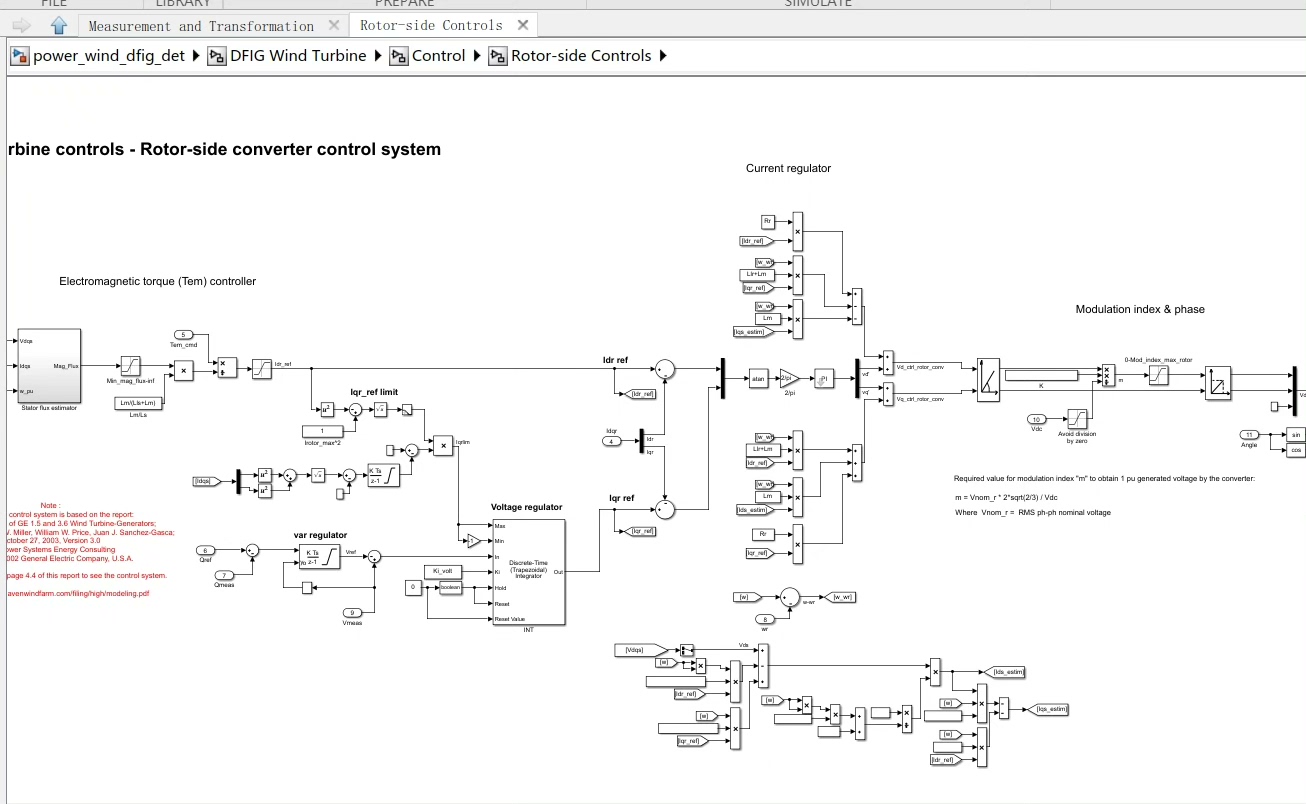
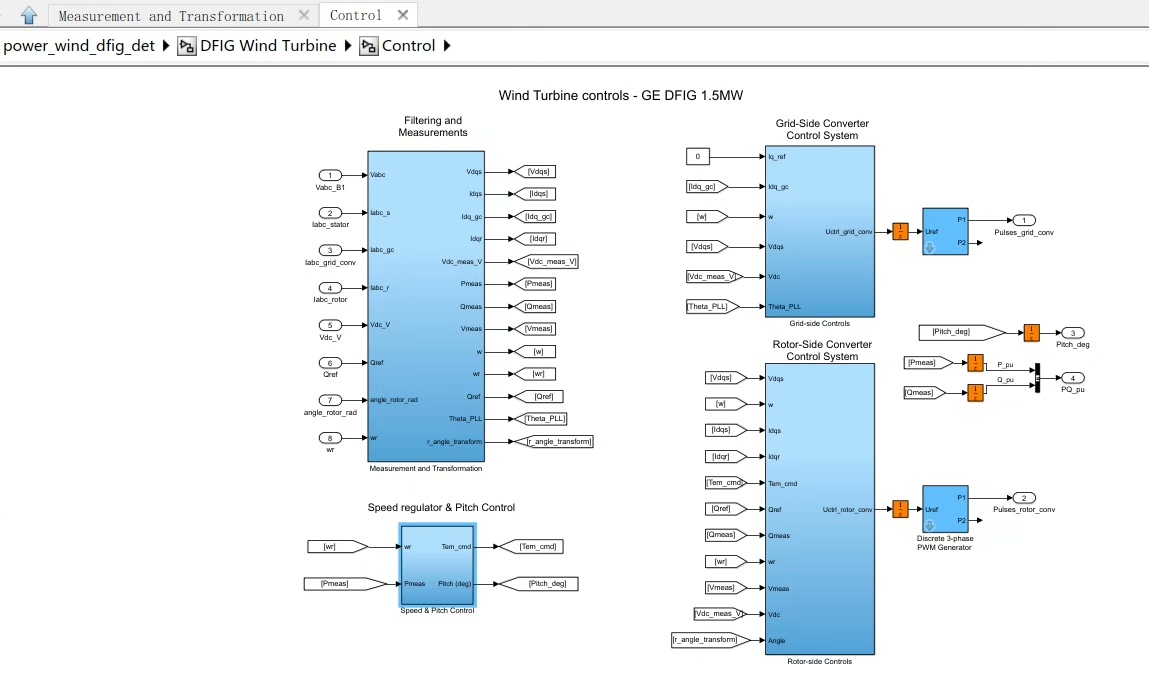
3.3 变速控制环关键配置
转子侧变流器控制要点:
- d轴电流控制无功功率
- q轴电流控制电磁转矩
- 采用双闭环结构:外环功率/转速控制,内环电流控制
锁相环(PLL)设计警示:
- 电网电压不平衡时需采用DDSRF-PLL等改进算法
- 带宽设置要适中(30-50Hz),过大会引入噪声
- 某项目曾因PLL失锁导致整机脱网,损失惨重
4. 高级调试与性能优化
4.1 典型问题排查手册
| 故障现象 | 可能原因 | 排查方法 |
|---|---|---|
| 功率波动大 | 风速测量噪声 | 检查风速仪安装位置,增加滤波 |
| 转速超调 | PI参数不当 | 减小积分增益,增加微分 |
| 桨距角振荡 | 机械延迟未补偿 | 加入时滞补偿模块 |
| 直流母线电压波动 | 电网侧变流器控制失效 | 检查电压外环参数 |
4.2 提升仿真精度的五个技巧
- 变步长求解器选择:推荐ode23tb,相对误差容差设为1e-4
- 模型离散化处理:控制周期建议取1ms,与真实控制器一致
- 参数敏感性分析:特别关注Cp曲线和传动链刚度的影响
- 硬件在环验证:通过Speedgoat等实时平台测试控制代码
- 数据驱动校准:利用SCADA数据修正气动参数
4.3 扩展应用场景
- 尾流效应研究:通过修改风速场模型,模拟风电场集群效应
- 电网故障穿越:添加电压跌落发生器测试LVRT能力
- 寿命预测分析:结合雨流计数法评估关键部件疲劳
5. 工程实践中的血泪教训
在北方某风场项目中,我们曾遇到仿真结果与实测偏差达15%的情况。后来发现是忽略了以下因素:
- 海拔修正:当地大气密度只有标准值的85%,必须修正气动公式
- 叶片污染:昆虫附着导致表面粗糙度增加,Cp下降约5%
- 电网阻抗:偏远地区电网短路比低,影响变流器稳定性
经过模型修正后,预测精度提高到3%以内。这也提醒我们:再完美的仿真也需要结合实际环境参数。建议每季度用现场数据校准一次模型,特别是那些运行超过5年的老机组。