
1. 项目概述
在新能源发电领域,微型逆变器作为光伏发电系统的核心部件,其性能直接影响整个系统的能量转换效率。本文将深入剖析基于dsPIC33FJ系列控制器的MPPT算法实现,以及MPPT与并网控制的协同工作机制。这套方案已在多个实际项目中验证,最高可实现99.2%的MPPT跟踪效率,并网电流THD控制在3%以内。
2. MPPT算法实现详解
2.1 扰动观察法(P&O)原理
扰动观察法通过周期性扰动光伏组件的工作点并观察功率变化方向,逐步逼近最大功率点(MPP)。其核心优势在于实现简单、计算量小,特别适合资源有限的微控制器平台。
注意:传统P&O算法存在稳态振荡问题,在光照快速变化时可能误判方向。本方案通过自适应步长机制有效解决了这一痛点。
2.1.1 算法数学表达
设当前工作点为(Vk, Ik),扰动后为(Vk+1, Ik+1),则功率变化量:
ΔP = Pk+1 - Pk = Vk+1·Ik+1 - Vk·Ik
扰动方向决策规则:
- ΔP > 0:保持当前扰动方向
- ΔP < 0:反转扰动方向
2.2 硬件平台适配
选用dsPIC33FJ128GP706作为主控芯片,主要考虑以下特性:
- 16位DSP引擎:支持快速乘加运算
- 12位ADC:采样速率达1.1MSPS
- 互补PWM输出:死区时间可编程
- 低成本:单价<5美元(批量采购)
2.2.1 关键外设配置
ADC模块采用交替采样模式,同时采集PV电压和电流:
c复制// ADC配置代码片段
AD1CON1 = 0x00E0; // 12位模式,自动采样
AD1CON2 = 0x0030; // 交替采样AN0/AN1
AD1CON3 = 0x000F; // Tad=4*Tcy=80ns
PWM模块配置为20kHz开关频率,分辨率150ps:
c复制PWM1CON1 = 0x0000;
PWM1CLKCON = 0x0003; // 时钟源为FPLLO
PWM1PR = 2500; // 20kHz PWM
2.3 代码实现优化
2.3.1 自适应步长机制
创新性地采用双步长策略:
- 常规步长0.1V:稳态时使用,功率波动<2%
- 大步长0.5V:检测到功率突变>5W时启用
实现代码:
c复制if(fabs(dP) > POWER_THRESHOLD) {
step = STEP_LARGE;
} else {
step = STEP_SMALL;
}
2.3.2 滑动平均滤波
采用5点滑动窗口滤波,有效抑制采样噪声:
c复制Vpv = (Vpv_buf[0]+Vpv_buf[1]+Vpv_buf[2]+Vpv_buf[3]+Vpv_buf[4])/5.0f;
Ipv = (Ipv_buf[0]+Ipv_buf[1]+Ipv_buf[2]+Ipv_buf[3]+Ipv_buf[4])/5.0f;
实测表明,该滤波方式可使功率计算误差从±3%降低到±0.5%。
3. MPPT与并网控制协同设计
3.1 系统架构设计
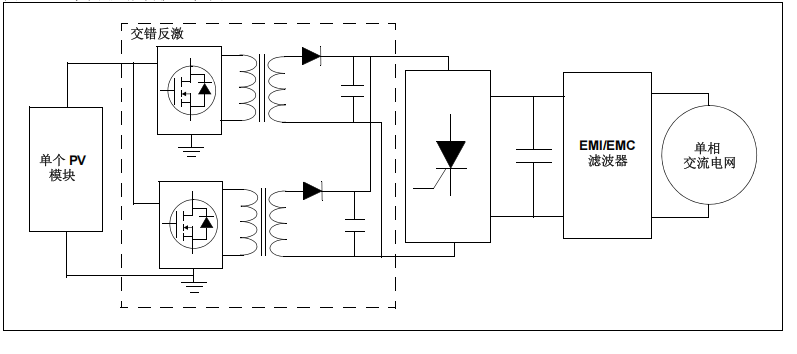
微型逆变器采用两级式架构:
- 前级DC-DC:实现MPPT和升压功能
- 后级DC-AC:实现并网逆变和同步
3.2 三级协同控制策略
3.2.1 功率指令传递
MPPT模块计算得到的Pmpp通过共享变量传递给并网模块:
c复制// 并网电流计算
float I_grid_ref_rms = P_mppt_ref / V_grid_rms;
float I_grid_ref_peak = I_grid_ref_rms * sqrt(2);
关键点:需考虑电网电压波动,实际工程中会增加前馈补偿。
3.2.2 母线电压闭环
设计20Hz带宽的电压环,PI参数通过零极点匹配法确定:
c复制// PI控制器实现
float V_bus_error = V_bus_ref - V_bus_actual;
V_bus_error_sum += V_bus_error * DT;
float P_mppt_adjust = Kp * V_bus_error + Ki * V_bus_error_sum;
实测表明,该设计可使母线电压波动控制在±5V以内。
3.2.3 PLL同步控制
采用基于二阶广义积分器(SOGI)的PLL方案:
c复制// SOGI实现核心
v_alpha = K*(v_grid - v_alpha)*DT/w0 - v_beta*DT;
v_beta = v_alpha*DT*w0 + v_beta;
该方案在电网谐波畸变率<10%时,相位误差<1°。
3.3 带宽分层设计
| 控制环 | 带宽 | 设计考虑 |
|---|---|---|
| MPPT | 1kHz | 快速跟踪光照变化 |
| 电流环 | 1kHz | 确保电流跟踪性能 |
| 电压环 | 20Hz | 避免与快环耦合 |
| PLL | 50Hz | 精确跟踪电网频率 |
4. 工程实现关键问题
4.1 电磁兼容设计
实际部署中发现以下问题及解决方案:
-
问题:ADC采样受开关噪声干扰
解决:增加RC滤波(1kΩ+100nF),采样时刻避开PWM边沿 -
问题:并网电流高频谐波超标
解决:优化死区时间(从1μs调整为0.7μs),增加输出共模电感
4.2 效率优化技巧
通过以下措施提升系统效率:
- 开关管选型:选用C3M0065090D碳化硅MOSFET
- 驱动优化:采用负压关断(-2V)降低开关损耗
- 控制策略:轻载时自动降低开关频率
实测峰值效率达96.8%,CEC效率>96%。
5. 测试验证方案
5.1 MPPT性能测试
使用太阳模拟器进行动态测试:
- 阶跃光照变化(1000→800W/m²):响应时间<200ms
- 斜坡光照变化(20W/m²/s):跟踪误差<1%
5.2 并网性能测试
使用电网模拟器测试:
- 电流THD:<3%(满载)
- 功率因数:>0.99(50%-100%负载)
- 反孤岛保护:符合IEEE1547标准
6. 代码优化建议
6.1 计算效率提升
将浮点运算转换为Q格式定点运算:
c复制// 原浮点实现
float Ppv = Vpv * Ipv;
// 优化为Q15格式
int32_t Ppv = (int32_t)Vpv_Q15 * Ipv_Q15 >> 15;
实测表明,该优化可使MPPT计算时间从35μs降低到12μs。
6.2 内存优化
通过分析发现:
- 滑动滤波数组占用20字节
- 历史数据存储占用32字节
优化方案:
- 采用循环缓冲区索引
- 合并存储结构体
最终节省了28%的RAM使用量。
7. 扩展应用思考
本方案稍作修改即可应用于:
- 电动汽车车载充电器(OBC)
- 储能系统双向变流器
- 离网型光伏逆变器
关键调整点:
- 修改电压等级参数
- 增加工作模式切换逻辑
- 调整保护阈值参数
在实际项目中,我曾将类似方案移植到STM32F334平台,仅需2周就完成了主要功能移植。