
1. MATLAB/Simulink电力电子与机电系统仿真实践
作为一名长期使用MATLAB进行工程仿真的技术人员,我记录了最近在Simulink环境下对电力电子和机电系统模块的探索过程。本文将详细介绍Simulink中Simscape系列工具包的实际应用案例,特别关注电力驱动系统和机械传动系统的建模要点。
1.1 仿真环境配置
本次实验使用的是MATLAB 2021a版本,运行在Windows 10专业版64位系统上,硬件配置为Intel Xeon E5-2603 v3处理器。这个配置对于运行复杂的多物理场仿真已经足够,但对于某些大型系统仿真(如后面提到的风力发电机案例)仍可能出现性能瓶颈。
提示:运行Simscape仿真时,建议关闭不必要的后台程序,因为物理系统仿真对计算资源需求较高。对于特别复杂的模型,可以考虑使用MATLAB的并行计算工具箱来加速仿真。
2. Simscape Electrical典型应用案例解析
2.1 PWM控制直流电机系统
PWM控制的直流电机是电力电子领域的经典案例。在Simscape Electrical中,这个模型完整展示了:
- 直流电源模块的参数设置(通常设置为24V或48V)
- PWM发生器的工作频率设置(建议10kHz左右)
- H桥电路中的MOSFET器件选择(注意导通电阻和热参数)
- 直流电机本体的参数化建模(包括电枢电阻、电感、反电动势常数等)
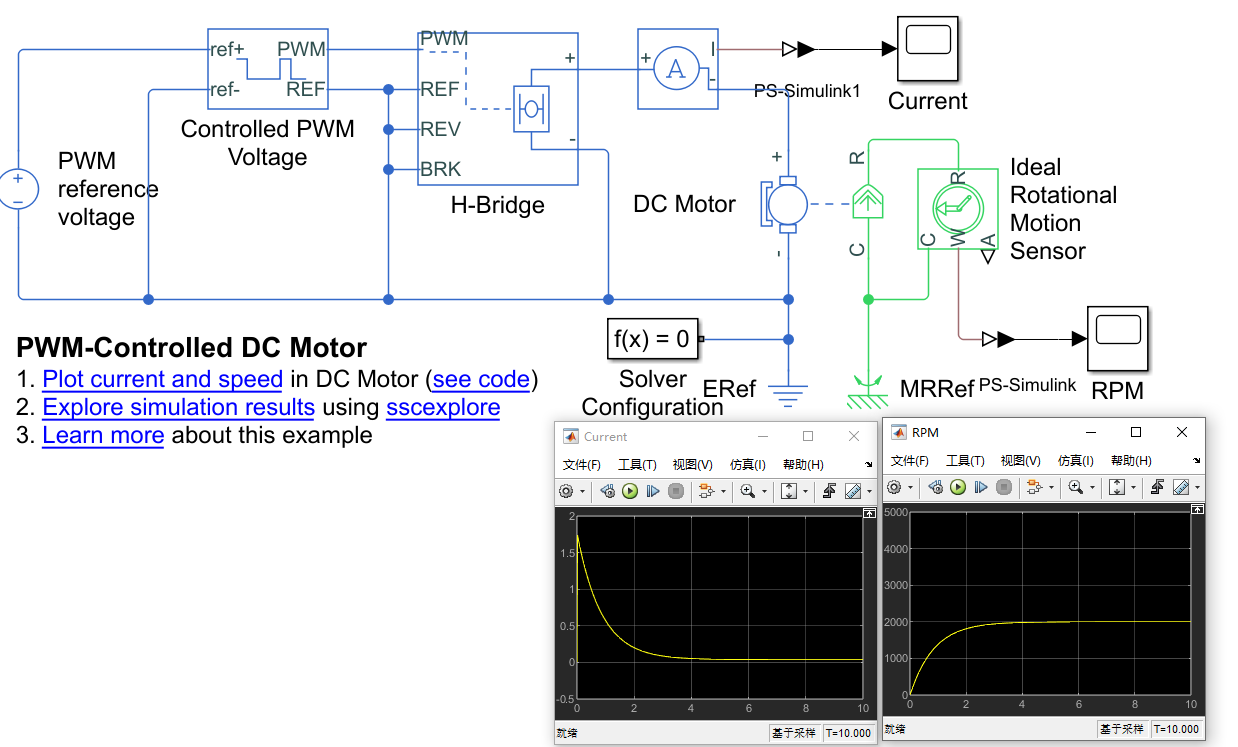
实际操作中发现,PWM频率设置过高可能导致仿真步长过小,计算时间大幅增加。经验值是保持开关频率在仿真总时间的1/1000以下。
2.2 线性电动执行机构控制
这个案例展示了机电一体化系统的典型控制方式:
matlab复制% 典型PID控制器参数设置
Kp = 1.5; % 比例增益
Ki = 0.2; % 积分增益
Kd = 0.05; % 微分增益
执行机构的机械参数需要与实际设备匹配,特别是质量、摩擦系数和行程限制等参数。在调试过程中,我发现机械系统的刚度对控制性能影响很大,需要在模型中准确设置。
2.3 三相异步风力发电机问题排查
在尝试运行"Three-Phase Asynchronous Wind Turbine Generator"案例时遇到了仿真失败的问题,即使将模型另存到其他位置也无法解决。经过排查,可能的原因包括:
- 缺少必要的工具包支持文件
- 初始条件设置不合理导致数值不稳定
- 仿真步长设置与系统动态不匹配
解决方法尝试:
- 检查所有依赖的工具箱是否已安装
- 减小仿真步长(如从auto改为1e-5)
- 修改求解器为ode15s(适合刚性系统)
- 检查模型中是否有未连接的信号线
3. Simscape Driveline车辆传动系统建模
3.1 四轮驱动车辆模型
这个模型完整呈现了:
- 发动机扭矩特性曲线设置
- 变速器齿轮比配置
- 差速器分配逻辑
- 轮胎与地面接触模型
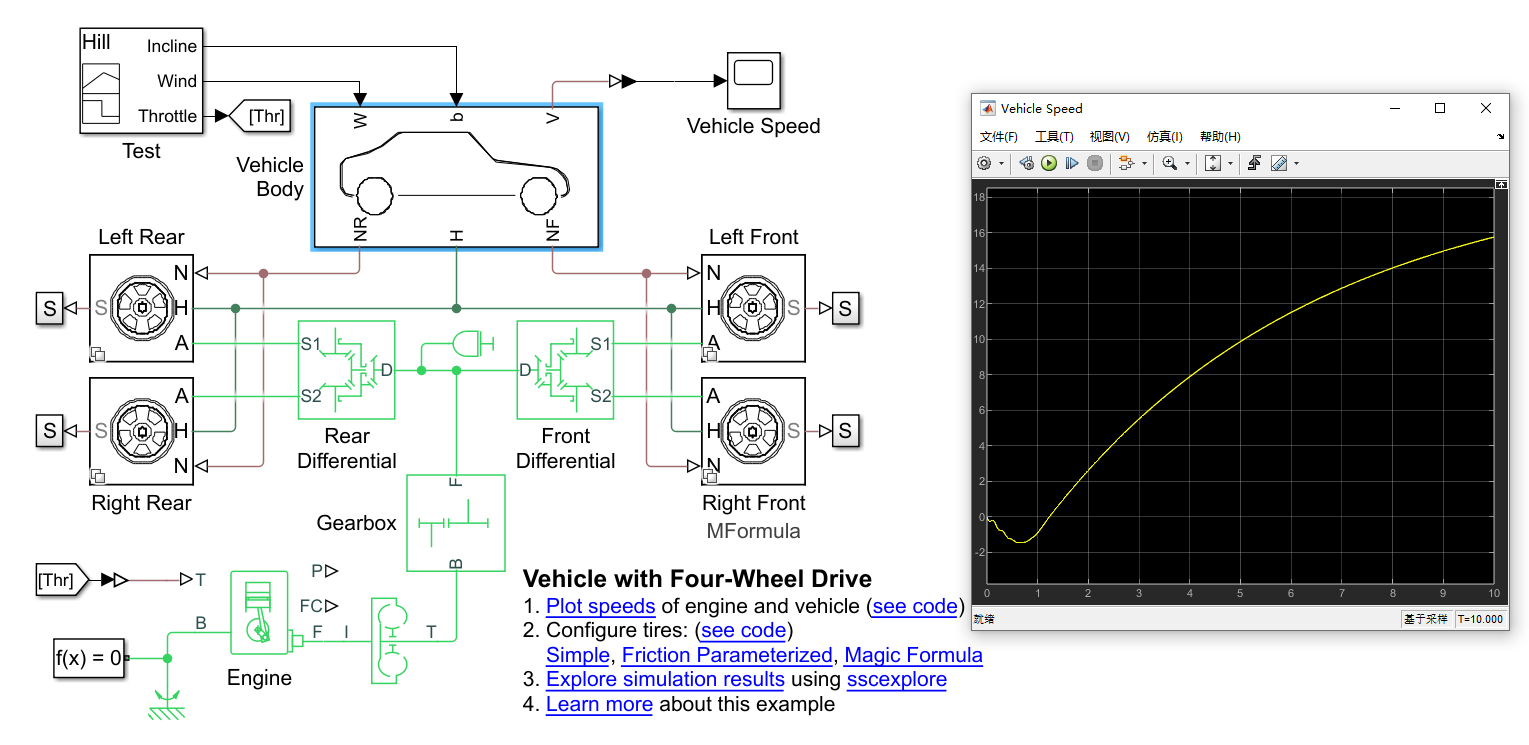
在参数设置时,特别要注意单位的一致性。Simscape默认使用国际单位制,但某些参数(如发动机转速)可能习惯用rpm表示,需要进行转换。
3.2 双模式混合动力变速器
混合动力系统建模的关键点:
- 能量管理策略的实现
- 电池SOC(State of Charge)估算
- 模式切换时的扭矩协调控制
建议仿真时先使用简化的电池模型,待系统主要功能验证完成后再替换为详细模型,以提高仿真效率。
4. 多物理场耦合仿真实践
4.1 双质量-弹簧-阻尼器系统
这个案例同时使用了Simulink和Simscape两种建模方式,可以直观比较二者的差异:
- Simulink版本:基于微分方程直接建模
- Simscape版本:基于物理连接自动生成方程
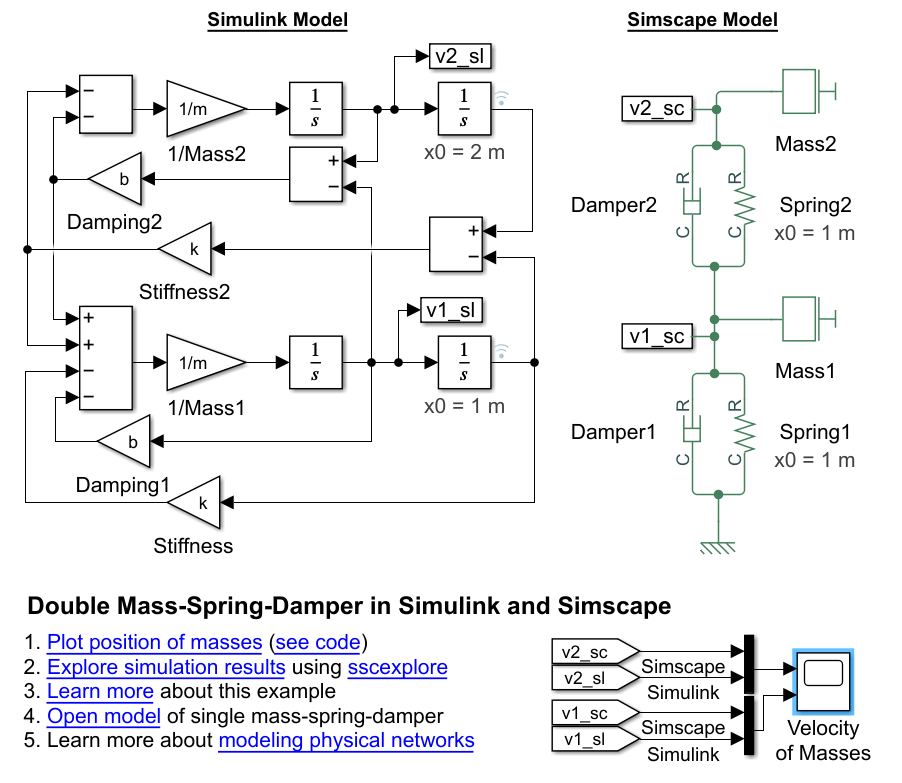
对于多体动力学系统,Simscape方法更接近实际物理系统,参数设置更直观,但计算量相对较大。
4.2 布雷顿循环(燃气轮机)定制组件
这个案例展示了如何创建自定义的热流体组件:
- 定义组件端口(如工质入口、出口、机械轴等)
- 编写能量和动量守恒方程
- 设置组件参数(如涡轮效率、压气机比等)
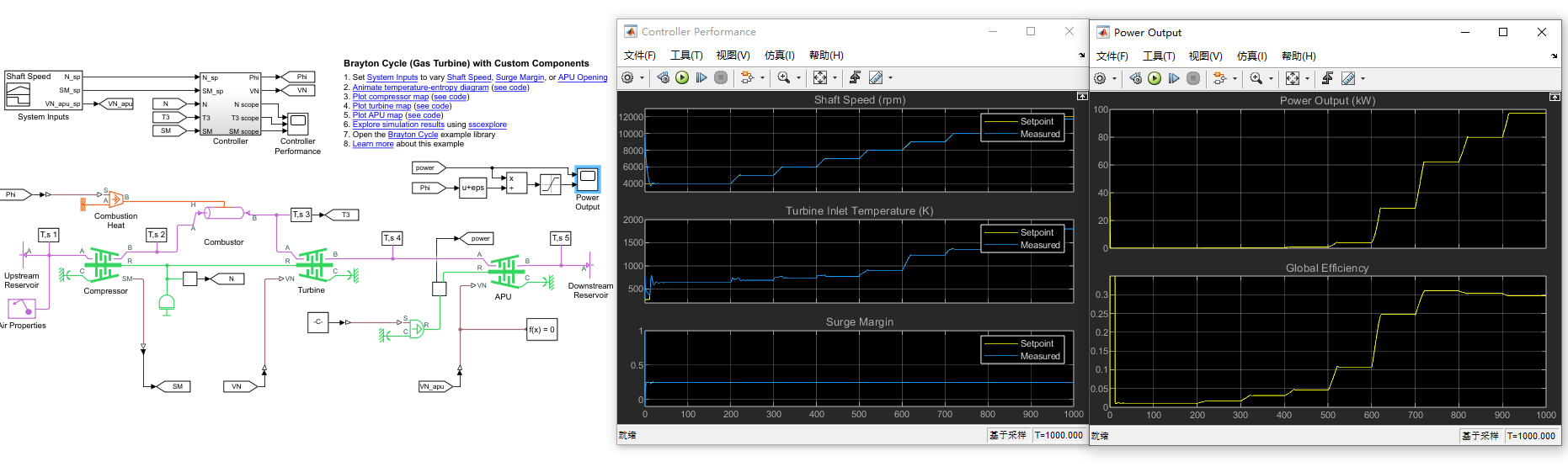
自定义组件开发是Simscape的高级功能,需要扎实的热力学和流体力学基础。建议先从修改现有组件开始,逐步掌握开发方法。
5. 硬件在环仿真注意事项
在尝试"Motor Control Blockset"中的案例时,发现这些模型需要连接TI的硬件才能进行完整仿真。对于没有实际硬件的情况,可以:
- 使用MATLAB提供的虚拟硬件驱动
- 修改模型,用信号源代替实际硬件输入
- 关注算法部分而非硬件接口部分的验证
硬件在环仿真时常见的时序问题可以通过以下方法缓解:
- 增加硬件缓冲区大小
- 调整仿真步长与硬件采样率的比例关系
- 使用异步执行模式
6. 仿真性能优化技巧
基于多次仿真实践,总结以下提升仿真效率的方法:
-
模型简化策略:
- 用理想开关代替详细半导体模型
- 简化热模型为集中参数
- 对高频开关器件使用平均模型
-
求解器选择指南:
- 刚性系统:ode15s或ode23t
- 非刚性系统:ode45
- 离散系统:ode3
-
参数扫描技巧:
matlab复制% 批量仿真示例
paramValues = linspace(0.1, 1, 10); % 参数范围
for i = 1:length(paramValues)
set_param('model/block', 'Parameter', num2str(paramValues(i)));
simout = sim('model');
% 结果处理...
end
7. 常见错误与解决方案
在实际使用中遇到的典型问题及解决方法:
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 仿真速度极慢 | 步长过小 | 增大相对容差(RelTol) |
| 代数环错误 | 信号直接反馈 | 增加单位延迟或记忆模块 |
| 发散或NaN结果 | 初始条件冲突 | 检查各储能元件初始状态 |
| 硬件连接失败 | 驱动未正确安装 | 重新安装MATLAB硬件支持包 |
特别提醒:当遇到"Three-Phase Asynchronous Wind Turbine Generator"这类无法运行的官方示例时,首先检查是否有未满足的依赖项,其次可以尝试在MATLAB命令窗口运行以下命令来重置Java路径:
matlab复制restoredefaultpath
rehash toolboxcache
8. 工程实践经验分享
经过这些案例的实践,我总结了以下几点心得:
-
建模顺序建议:
- 先建立简化模型验证概念
- 然后逐步增加细节
- 最后进行参数优化
-
参数获取方法:
- 优先使用设备手册数据
- 其次考虑系统辨识
- 最后才使用估计值
-
结果验证技巧:
- 与理论计算结果交叉验证
- 检查能量/功率平衡
- 对关键变量进行合理性分析
对于需要硬件支持的案例,即使没有实际设备,也可以通过研究模型了解算法实现细节。例如电机控制案例中的FOC(磁场定向控制)算法,完全可以在软件层面深入理解其实现原理。
在后续工作中,我计划进一步探索Simscape语言的应用,开发自定义组件来满足特定项目的需求。同时,将更多地把这些仿真技术应用到实际工程问题的解决中,特别是在新能源发电和电动汽车领域。