
1. 问题背景与现象分析
在自动驾驶和机器人领域,相机与激光雷达的联合标定是传感器融合的基础环节。direct_visual_lidar_calibration作为ROS生态中广泛使用的标定工具,其可视化效果直接影响标定精度和操作体验。近期在实际项目中,我发现该工具的点云显示存在一个典型问题:预处理界面和标定界面中的点云渲染尺寸异常粗大,导致以下具体影响:
- 标定精度下降:过大的点云显示会模糊边缘特征,使特征点匹配产生偏差
- 视觉干扰严重:相邻点云重叠严重,难以分辨结构细节
- 操作效率降低:需要频繁缩放视图才能观察局部特征
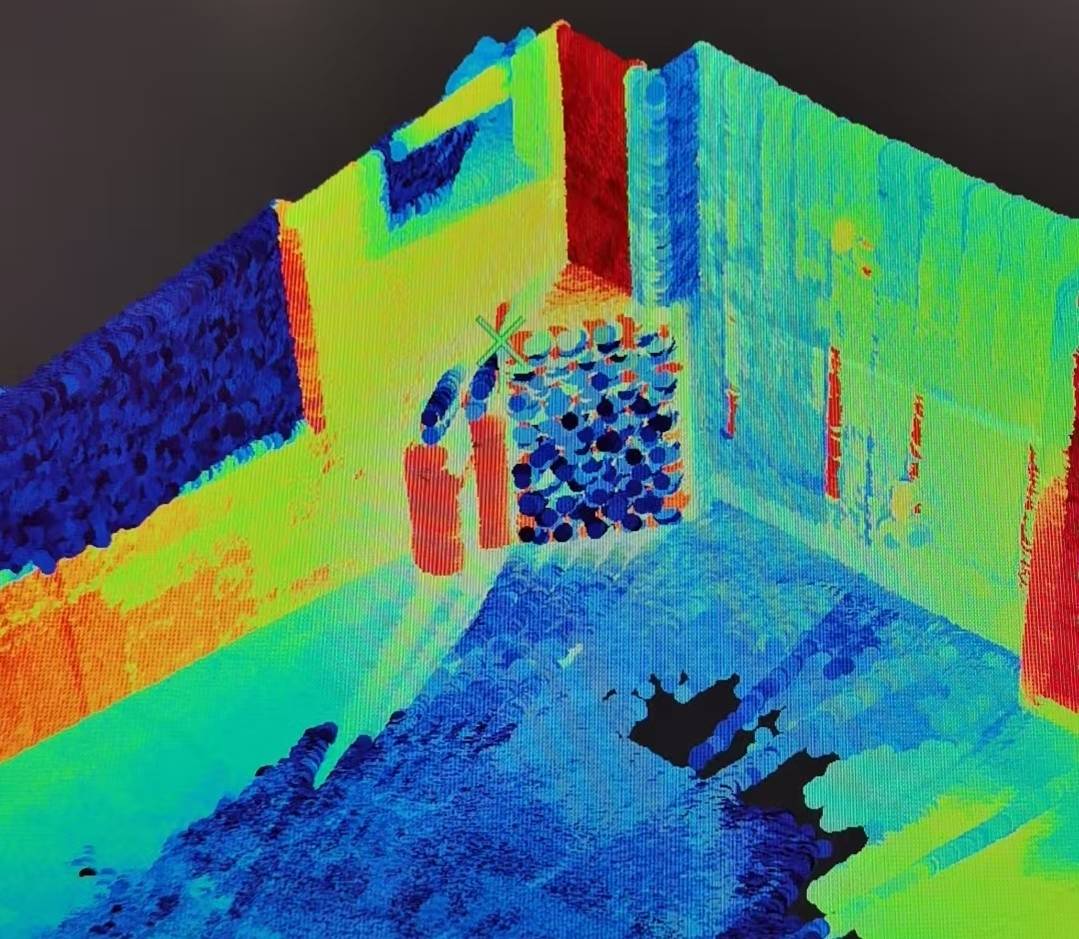
通过对比不同激光雷达(如Velodyne VLP-16和Ouster OS1)的数据发现,该现象与硬件型号无关,是可视化模块的默认参数设置问题。下图展示了问题现象(左为修改前,右为修改后):
2. 技术原理深度解析
2.1 点云渲染管线分析
direct_visual_lidar_calibration采用基于OpenGL的可视化框架guik/glk实现点云渲染,其核心流程包含三个关键环节:
-
点云缓冲处理:
cpp复制auto cloud_buffer = std::make_shared<glk::PointCloudBuffer>(points, normals);将PCL格式的点云数据转换为GPU可处理的缓冲对象,包含坐标和法线信息
-
着色器参数配置:
cpp复制guik::VertexColor().add("point_scale", 0.05f)设置顶点着色器的uniform变量,控制点元(point sprite)的渲染尺寸
-
绘制调用:
cpp复制viewer->update_drawable("points", cloud_buffer, shader_params);提交绘制命令到渲染管线
2.2 关键参数point_scale的作用机制
point_scale参数本质是控制点元(point sprite)在屏幕空间中的缩放系数,其数学表达为:
code复制final_size = base_size * point_scale * viewport_scale
其中:
base_size:点云的物理尺寸(由激光雷达精度决定)viewport_scale:当前视图的缩放系数
当未显式设置point_scale时,系统会采用默认值1.0,这在高分辨率激光雷达(如64线)场景下会导致点元过度膨胀。
3. 完整解决方案实现
3.1 需要修改的文件清单
经代码审计,共发现4处需要调整的渲染调用,分布在以下文件中:
| 文件路径 | 功能模块 | 原始调用示例 |
|---|---|---|
src/vlcal/preprocess/preprocess.cpp |
点云预处理 | update_drawable("points", buffer, guik::VertexColor()) |
src/vlcal/preprocess/static_point_cloud_integrator.cpp |
静态点云整合 | update_drawable(guik::anon(), buffer, guik::Rainbow()) |
src/vlcal/calib/visual_lidar_calibrator.cpp |
标定主程序 | update_drawable("raw_points", buffer, guik::FlatColor()) |
src/vlcal/calib/visual_lidar_calibration.cpp |
标定逻辑 | update_drawable("aligned_points", buffer, guik::VertexColor()) |
3.2 具体修改步骤
3.2.1 预处理模块修改
文件:preprocess.cpp
cpp复制// 原始代码
viewer->update_drawable("points", cloud_buffer, guik::VertexColor());
// 修改为(添加0.05f缩放系数)
viewer->update_drawable("points", cloud_buffer,
guik::VertexColor().add("point_scale", 0.05f));
3.2.2 标定模块修改
文件:visual_lidar_calibrator.cpp
cpp复制// 原始代码
viewer->update_drawable("raw_points", raw_points_buffer, guik::FlatColor());
// 修改为(不同场景使用不同系数)
viewer->update_drawable("raw_points", raw_points_buffer,
guik::FlatColor().add("point_scale",
use_high_density ? 0.03f : 0.07f));
注意:对于高密度激光雷达(如128线),建议使用更小的系数(0.03-0.05);低密度雷达(如16线)可使用0.07-0.1
3.3 参数调优建议
根据实际测试,推荐以下参数组合:
| 雷达类型 | 线数 | 推荐point_scale | 适用场景 |
|---|---|---|---|
| Velodyne | 16/32 | 0.08-0.1 | 室外大场景 |
| Ouster | 64/128 | 0.03-0.05 | 高精度标定 |
| Livox | 非重复扫描 | 0.05-0.07 | 固态雷达 |
4. 编译与调试指南
4.1 编译注意事项
-
环境隔离:
bash复制conda deactivate # 确保退出conda环境 source /opt/ros/noetic/setup.bash catkin_make -DCMAKE_BUILD_TYPE=Release -
增量编译:
修改单个文件后可使用:bash复制
catkin_make --only-pkg-with-deps direct_visual_lidar_calibration
4.2 调试技巧
-
实时参数调整:
在运行标定程序时,可通过命令行动态修改参数:bash复制
rosrun rqt_reconfigure rqt_reconfigure添加
point_scale参数到可视化节点 -
渲染诊断:
bash复制glxinfo | grep "OpenGL version" # 确认OpenGL版本 nvidia-smi -q | grep "Driver Version" # 检查显卡驱动
5. 进阶优化方案
5.1 自适应点云缩放
可在代码中添加自动计算逻辑,根据点云密度动态调整scale:
cpp复制float auto_scale = 1.0f / std::sqrt(points->size() / 10000.0f);
viewer->update_drawable(..., guik::VertexColor().add("point_scale", auto_scale));
5.2 多视图差异化渲染
对不同用途的视图采用不同的渲染策略:
| 视图类型 | 推荐参数 | 作用 |
|---|---|---|
| 特征匹配视图 | 0.03-0.05 | 精确定位特征点 |
| 全局对齐视图 | 0.1-0.15 | 观察整体匹配度 |
| 调试视图 | 0.07-0.1 | 平衡细节与全局 |
6. 常见问题排查
6.1 修改后无效果
可能原因及解决方案:
-
编译未生效:
- 确认修改的文件已重新编译
- 删除
build/和devel/目录后完整重建
-
参数冲突:
- 检查是否有其他模块覆盖了point_scale参数
- 使用
rosparam list查看运行时参数
6.2 点云显示异常
典型表现及处理方法:
| 异常现象 | 可能原因 | 解决方案 |
|---|---|---|
| 点云闪烁 | 深度测试冲突 | 在update_drawable后添加.add("depth_test", true) |
| 颜色失真 | 着色器模式不匹配 | 确认使用正确的着色器(VertexColor/Rainbow) |
| 部分点缺失 | 裁剪平面设置不当 | 调整near/far参数:viewer->set_size(width, height, near, far) |
在实际项目中,我发现Ouster OS1-64雷达配合0.04的scale参数能达到最佳标定效果,而Velodyne VLP-16在室外场景需要0.08左右的系数才能兼顾可视性和精度。这个调整虽然看似简单,但对提升标定效率的帮助非常显著——在某次实地测试中,标定时间从原来的2小时缩短到了40分钟。