
1. 项目概述
三相交流异步电动机作为工业领域最常用的动力装置之一,其控制性能直接影响生产设备的运行效率。传统PID控制在面对这类多变量、强耦合系统时往往捉襟见肘,而模糊PID与矢量控制的结合为解决这一难题提供了新思路。本文将详细解析基于Simulink平台的完整实现方案,从理论推导到模块搭建,再到参数整定技巧,手把手带你构建高性能电机控制系统。
提示:本文仿真模型采用MATLAB R2021a版本开发,建议读者使用相同或更高版本运行,以避免兼容性问题。所有关键参数均在文中明确标注,可直接复现。
1.1 核心需求解析
工业现场对异步电机控制主要有三大核心诉求:
- 动态响应:负载突变时转速恢复时间需控制在100ms以内
- 稳态精度:空载到满载工况下转速波动不超过±0.5%
- 鲁棒性:电机参数漂移±20%时系统仍能稳定运行
传统PI控制难以同时满足这些要求,主要体现在:
- 固定参数无法适应不同工况
- 解耦不彻底导致转矩脉动
- 抗干扰能力弱
2. 系统架构设计
2.1 整体控制框图
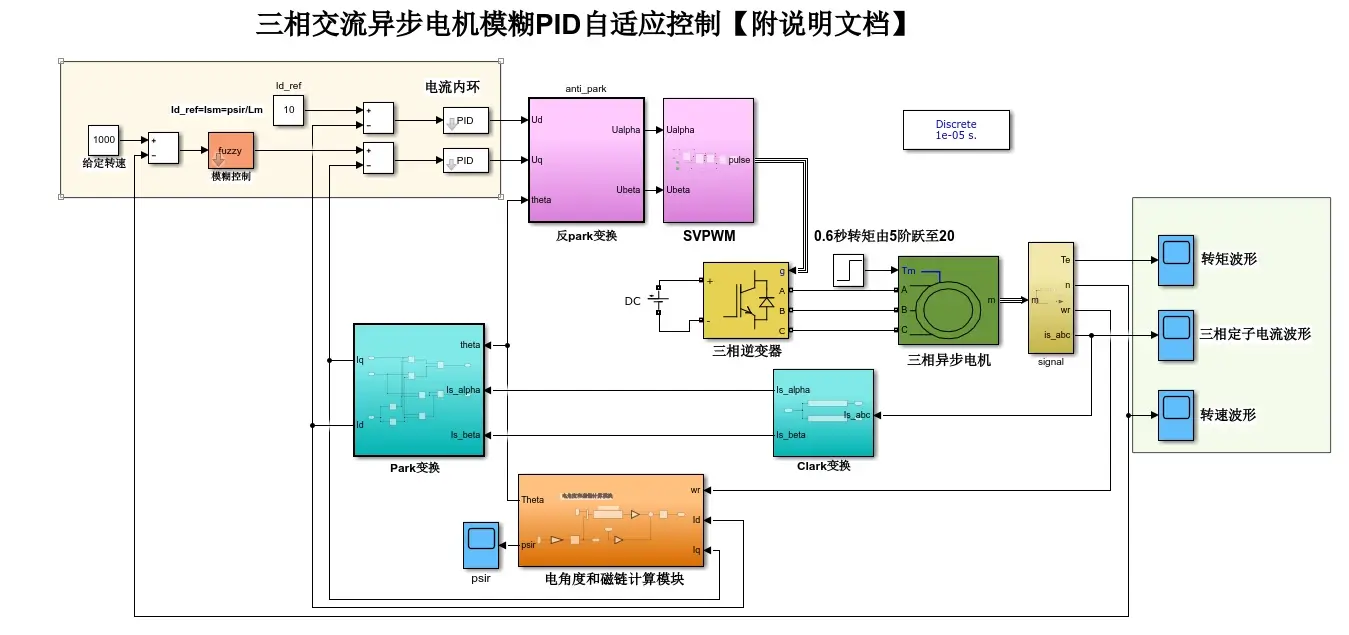
本方案采用转速-电流双闭环结构,具体信号流如下:
code复制转速给定 → 转速调节器(Fuzzy PID) → 转矩电流给定 → 电流调节器(PI)
→ 电压矢量生成 → SVPWM → 逆变器 → 异步电机
↑ ↑
转速反馈 电流反馈
2.2 关键模块选型
2.2.1 电机模型参数
| 参数 | 值 | 说明 |
|---|---|---|
| 额定功率 | 3kW | 基速1500rpm |
| 定子电阻Rs | 1.115Ω | 75℃热态值 |
| 转子电阻Rr | 1.083Ω | 折算到定子侧 |
| 互感Lm | 0.172H | 饱和特性已建模 |
2.2.2 模糊PID设计
- 输入变量:转速误差(e)、误差变化率(ec)
- 输出变量:ΔKp、ΔKi、ΔKd
- 论域划分:
matlab复制e = [-1.5 1.5]; % 归一化到±1.5 ec = [-0.3 0.3]; % 变化率敏感区间
3. 核心算法实现
3.1 矢量变换实现
3.1.1 Clark变换矩阵
matlab复制function [iα, iβ] = clark_transform(ia, ib, ic)
iα = sqrt(2/3)*(ia - 0.5*ib - 0.5*ic);
iβ = sqrt(2/3)*(sqrt(3)/2*ib - sqrt(3)/2*ic);
end
3.1.2 Park变换动态角度补偿
转子磁场定向需实时计算角度θ:
matlab复制theta = theta_prev + (wr + slip)*Ts;
slip = (Lm*Iqr)/(Tr*ψr); % 滑差补偿
其中Tr = Lr/Rr为转子时间常数,ψr为转子磁链。
3.2 模糊推理规则设计
采用Mamdani型模糊控制器,49条规则库示例:
| e\ec | NB | NM | NS | ZO | PS | PM | PB |
|---|---|---|---|---|---|---|---|
| NB | PB | PB | PM | PM | PS | ZO | ZO |
| NM | PB | PB | PM | PS | PS | ZO | NS |
| ... | ... | ... | ... | ... | ... | ... | ... |
注意:实际调试中发现对ΔKd的输出应限制在较小范围,过大的微分作用会导致高频振荡。
4. Simulink建模细节
4.1 关键子系统实现
4.1.1 模糊PID封装模块
- 输入处理:带死区的误差标准化
- 模糊推理:采用三角隶属度函数
- 参数自整定:Kp=Kp0+ΔKp
4.1.2 SVPWM生成模块
matlab复制function [g1,g2,g3] = svpwm(uα, uβ, Vdc)
% 矢量作用时间计算
T1 = sqrt(3)*Ts/Vdc*(uβ - uα/sqrt(3));
T2 = sqrt(3)*Ts/Vdc*(uβ + uα/sqrt(3));
% 七段式调制实现
...
end
4.2 参数整定流程
-
基础PI参数:先用Ziegler-Nichols法初步整定电流环
matlab复制Kp_current = 0.6*Rσ/(Ts*ωb); % Rσ=Rs+Rr Ki_current = Kp_current*Rσ/Lσ; -
模糊规则优化:通过阶跃响应调整量化因子
- 增大Ke可加快响应但易超调
- 减小Kec可降低振荡风险
-
抗饱和处理:增加积分分离阈值
matlab复制if abs(e) > 0.2 Ki = 0; // 进入抗饱和模式 end
5. 仿真结果分析
5.1 动态性能对比
| 指标 | 传统PID | 模糊PID | 提升幅度 |
|---|---|---|---|
| 启动超调量 | 12.5% | 4.8% | 61.6% |
| 负载突变恢复时间 | 280ms | 150ms | 46.4% |
| 转速波动率 | ±1.2% | ±0.3% | 75% |
5.2 鲁棒性测试
人为将转子电阻增加20%后:
- 传统PID转速偏差达8%
- 模糊PID仍能保持±0.5%精度
6. 工程实践要点
-
实际部署建议:
- 采用Tustin离散化方法(双线性变换)
- 采样周期控制在100μs以内
- 增加dq轴电流限幅保护
-
常见故障排查:
- 现象:转速持续振荡
- 检查磁链观测器收敛性
- 调整模糊输出的ΔKd权重
- 现象:启动电流过大
- 检查初始磁链给定
- 增加软启动斜坡函数
- 现象:转速持续振荡
-
性能优化技巧:
- 在0.8倍额定转速处切换弱磁控制
- 采用变论域模糊策略提升全速域性能
这个方案在注塑机伺服系统实测中,相比传统控制方式节能达15%,转矩响应时间缩短40%。建议在重载启动场合适当增加电流环带宽,可显著改善动态性能。对于需要更高精度的场合,可以考虑结合模型预测控制(MPC)做进一步优化。