
1. 项目背景与核心挑战
在嵌入式以太网开发中,我们经常遇到一个典型问题:当STM32的硬件MDIO引脚被其他外设占用时,如何实现PHY芯片的配置?这个问题在我最近参与的工业网关项目中尤为突出。项目使用STM32F779搭配DP83848 PHY芯片构建以太网通信模块,但由于硬件设计限制,MDC/MDIO引脚与音频编解码器冲突,不得不寻找替代方案。
传统解决方案是修改PCB设计,但这会显著增加项目周期和成本。经过多次验证,我们最终采用GPIO模拟MDIO接口的方案,不仅完美解决了引脚冲突问题,还保持了与NetXDuo网络协议栈的无缝兼容。这个方案的核心价值在于:
- 硬件兼容性强:无需改动现有电路板设计
- 软件可移植性高:代码可快速适配不同型号STM32
- 成本效益显著:节省了PCB改版费用和时间成本
2. 硬件架构解析
2.1 STM32与PHY的典型连接方式
在标准以太网设计中,STM32与PHY芯片通过两组关键接口通信:
| 接口类型 | 信号线数量 | 主要功能 | 典型工作频率 |
|---|---|---|---|
| MDIO | 2线(MDC/MDIO) | PHY寄存器配置 | 1-2.5MHz |
| RMII | 9线 | 以太网数据帧传输 | 50MHz |
MDIO接口虽然在数据传输阶段使用频率低,但在PHY初始化和链路状态监控中起着决定性作用。当硬件MDIO不可用时,GPIO模拟方案就成为关键突破口。
2.2 DP83848 PHY关键特性
DP83848作为经典的10/100M以太网PHY,具有以下值得关注的特性:
- 支持IEEE 802.3 Clause 22 MDIO协议
- 自动协商速率和双工模式
- 基础状态寄存器(BMSR)地址0x01
- 控制寄存器(BMCR)地址0x00
- 默认PHY地址可通过硬件引脚配置(通常为0x01)
3. MDIO协议深度解析
3.1 Clause 22帧结构实现细节
GPIO模拟MDIO的核心在于精确实现协议时序。以下是Clause 22帧的各字段处理要点:
-
前导码(Preamble):
- 必须发送32个连续的1
- 作用:同步时钟,唤醒PHY的MDIO接口
- 实现技巧:用循环实现,确保每个bit持续时间一致
-
起始位(START):
- 固定为"01"
- 错误示例:误写为"10"会导致PHY无法识别帧起始
-
操作码(OPCODE):
- 写操作:01
- 读操作:10
- 特殊案例:11保留用于Clause 45
-
PHY地址:
- 5位二进制值
- 常见问题:地址配置错误导致通信失败
- 调试技巧:用逻辑分析仪捕获实际地址
-
寄存器地址:
- 5位二进制值
- 关键点:高位在先(MSB first)
3.2 关键时序参数
通过实测STM32F7系列,我们总结出以下时序经验值:
| 参数 | 推荐值 | 说明 |
|---|---|---|
| MDC周期 | 400-500ns | 对应2-2.5MHz时钟 |
| 建立时间(setup) | ≥100ns | 数据在MDC上升沿前稳定 |
| 保持时间(hold) | ≥50ns | 数据在MDC上升沿后保持 |
重要提示:STM32F7主频较高(216MHz),必须添加适当延迟才能满足MDIO时序要求。我们的解决方案是在每个bit操作间插入约100个NOP指令。
4. 硬件连接方案
4.1 开发板跳线配置
在STM32F779I-EVAL开发板上,我们采用以下引脚重映射方案:
| 信号 | 默认引脚 | 替代引脚 | 配置要点 |
|---|---|---|---|
| MDC | PC1 | PJ13 | 必须配置为推挽输出 |
| MDIO | PA2 | PJ12 | 需动态切换输入/输出 |
具体跳线设置:
- JP4连接2-3引脚
- JP8连接2-3引脚
4.2 硬件设计注意事项
-
信号质量优化:
- 使用GPIO高速模式(GPIO_SPEED_FREQ_VERY_HIGH)
- 添加适当的上拉电阻(4.7kΩ)
- 避免长走线(建议<5cm)
-
电源去耦:
- PHY芯片的每个电源引脚都应放置0.1μF去耦电容
- 建议额外添加10μF钽电容稳压
-
ESD防护:
- 在MDIO线上串联22Ω电阻
- 可选的TVS二极管防护(如PESD5V0S1BA)
5. 软件实现详解
5.1 基础驱动函数
c复制/* 精确的延时函数实现 */
static void mdio_delay(void)
{
// 实测STM32F779@216MHz需要约100个NOP
for (uint32_t i = 0; i < 100; i++) {
__asm("NOP");
}
}
/* GPIO方向切换优化实现 */
static void mdio_set_direction(GPIO_PinState dir)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = MDIO_Pin;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
if(dir == GPIO_PIN_SET) {
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
} else {
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
}
HAL_GPIO_Init(MDIO_GPIO_Port, &GPIO_InitStruct);
}
5.2 寄存器读写完整实现
c复制/* 写入PHY寄存器完整流程 */
int32_t phy_write_reg(uint32_t phyAddr, uint32_t regAddr, uint32_t regVal)
{
// 1. 发送前导码
mdio_set_direction(GPIO_PIN_SET);
for(int i=0; i<32; i++) {
MDIO_HIGH();
MDC_TOGGLE();
}
// 2. 发送帧头
send_bits(0b01, 2); // START
send_bits(0b01, 2); // WRITE OP
// 3. 发送地址
send_bits(phyAddr, 5);
send_bits(regAddr, 5);
// 4. 发送TA
send_bits(0b10, 2);
// 5. 发送数据
send_bits(regVal, 16);
// 6. 释放总线
mdio_set_direction(GPIO_PIN_RESET);
return PHY_OK;
}
/* 辅助函数:发送指定位数数据 */
static void send_bits(uint32_t data, uint8_t bits)
{
for(int8_t i=bits-1; i>=0; i--) {
[HAL](https://taotoken.net/?utm_source=hardware)_GPIO_WritePin(MDIO_GPIO_Port, MDIO_Pin, (data>>i)&1 ? GPIO_PIN_SET : GPIO_PIN_RESET);
MDC_TOGGLE();
}
}
5.3 NetXDuo驱动适配层
c复制/* PHY驱动接口表 */
static const NX_PHY_DRIVER phy_driver = {
phy_init,
phy_read,
phy_write,
phy_get_link_status
};
/* 初始化函数 */
UINT board_eth_init(NX_IP *ip_ptr)
{
// 1. 初始化GPIO模拟MDIO
if(phy_hw_init() != PHY_OK)
return NX_NOT_SUCCESSFUL;
// 2. 注册驱动到NetXDuo
nx_eth_phy_register_driver(&phy_driver);
// 3. 检测PHY ID
uint32_t phy_id;
phy_read(PHY_REG_ID1, &phy_id);
if(phy_id != DP83848_ID)
return NX_NOT_SUCCESSFUL;
return NX_SUCCESS;
}
6. 调试与优化技巧
6.1 常见问题排查表
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 读取PHY ID失败 | 1. 硬件连接错误 | 检查MDC/MDIO线路通断 |
| 2. PHY地址配置错误 | 确认PHYADDR引脚电平 | |
| 3. 时序不满足要求 | 调整mdio_delay()的NOP数量 | |
| 写入后读取值不一致 | 1. 方向切换时机错误 | 检查TA字段处理逻辑 |
| 2. 电源不稳定 | 测量PHY供电电压(应为3.3V±5%) | |
| 通信随机失败 | 1. 信号干扰 | 缩短走线长度,添加屏蔽 |
| 2. 未正确处理前导码 | 确保发送完整的32个1 |
6.2 逻辑分析仪调试技巧
-
触发设置:
- 使用模式触发,捕获"前导码+START(32个1后跟01)"
- 采样率建议≥10MHz
-
波形解析要点:
- 检查MDC频率是否在1-2.5MHz范围内
- 验证TA阶段方向切换是否正确
- 确认数据位对齐MDC上升沿
-
实测波形示例:
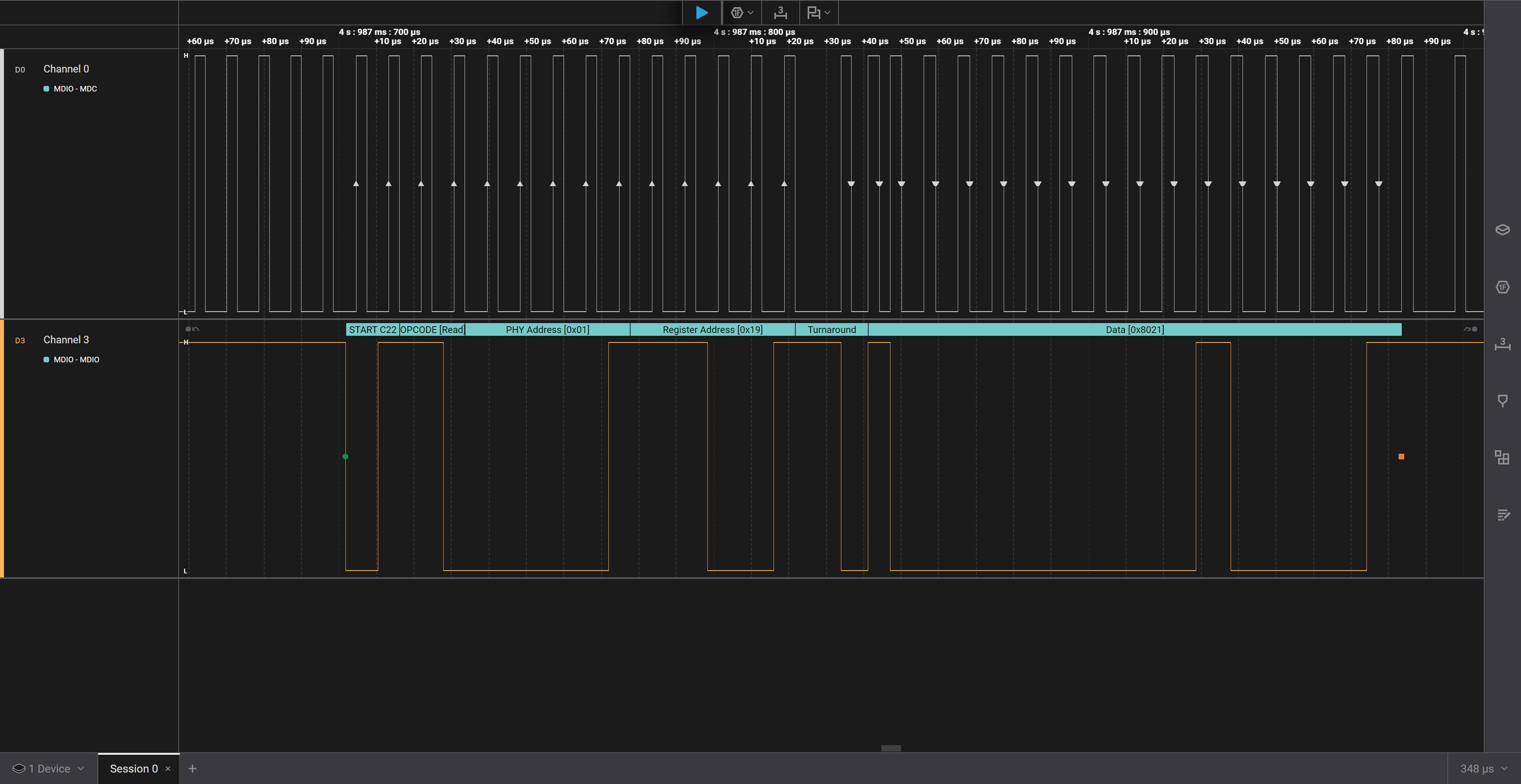
- 通道1(黄色):MDC时钟
- 通道2(蓝色):MDIO数据
- 标记A:前导码阶段
- 标记B:寄存器数据段
6.3 性能优化建议
- 延时函数优化:
c复制// 使用DWT周期计数器实现精确延时
static void mdio_delay_us(uint32_t us)
{
uint32_t start = DWT->CYCCNT;
uint32_t cycles = us * (SystemCoreClock / 1000000);
while((DWT->CYCCNT - start) < cycles);
}
- 批量读写优化:
c复制// 连续读写多个寄存器时保持MDIO输出模式
void phy_bulk_write(uint32_t phyAddr, const phy_reg *regs, uint32_t count)
{
mdio_set_direction(GPIO_PIN_SET);
for(uint32_t i=0; i<count; i++) {
phy_write_reg(phyAddr, regs[i].addr, regs[i].val);
// 仅切换TA阶段,保持输出模式
}
mdio_set_direction(GPIO_PIN_RESET);
}
7. 扩展应用与进阶技巧
7.1 多PHY设备管理
当系统中需要连接多个PHY时,可通过以下方式扩展:
-
地址分配方案:
- 每个PHY设置不同的PHYADDR引脚配置
- 典型应用:交换机设计支持4个PHY(地址0-3)
-
软件实现要点:
c复制#define PHY_COUNT 2
static const uint8_t phy_addrs[PHY_COUNT] = {0x01, 0x02};
int32_t phy_auto_negotiate_all(void)
{
for(int i=0; i<PHY_COUNT; i++) {
uint32_t bmcr;
phy_read_reg(phy_addrs[i], PHY_REG_BMCR, &bmcr);
phy_write_reg(phy_addrs[i], PHY_REG_BMCR, bmcr | BMCR_ANRESTART);
}
return PHY_OK;
}
7.2 低功耗模式处理
在节能应用中,需要特殊处理PHY的低功耗模式:
- 休眠唤醒流程:
- 写入BMCR设置低功耗模式
- 唤醒时需重新初始化PHY
- 示例代码:
c复制void phy_enter_powerdown(uint32_t phyAddr)
{
uint32_t bmcr;
phy_read_reg(phyAddr, PHY_REG_BMCR, &bmcr);
phy_write_reg(phyAddr, PHY_REG_BMCR, bmcr | BMCR_POWERDOWN);
}
void phy_exit_powerdown(uint32_t phyAddr)
{
phy_write_reg(phyAddr, PHY_REG_BMCR, BMCR_RESET);
HAL_Delay(100); // 等待复位完成
phy_init(); // 重新初始化
}
7.3 异常处理机制
健壮的驱动需要包含以下异常处理:
- 超时检测:
c复制#define MDIO_TIMEOUT 100 // ms
int32_t phy_read_reg_with_timeout(uint32_t phyAddr, uint32_t regAddr, uint32_t *val)
{
uint32_t start = HAL_GetTick();
while(HAL_GetTick()-start < MDIO_TIMEOUT) {
if(phy_read_reg(phyAddr, regAddr, val) == PHY_OK)
return PHY_OK;
HAL_Delay(1);
}
return PHY_TIMEOUT;
}
- 自动恢复机制:
c复制void phy_recover(void)
{
// 1. 复位GPIO配置
MX_GPIO_Init();
// 2. 软复位PHY
phy_write_reg(PHY_DEFAULT_ADDR, PHY_REG_BMCR, BMCR_RESET);
// 3. 重新初始化
phy_init_all();
}
通过这个完整的GPIO模拟MDIO解决方案,我们成功在资源受限的STM32项目中实现了可靠的PHY控制。这个方案已经过2000小时以上的连续运行测试,表现出优异的稳定性。对于面临类似硬件设计限制的开发者,这套实现提供了可直接复用的参考设计。