
1. 项目概述
作为一名在工业自动化领域摸爬滚打多年的工程师,我深知恒压供水系统在现代建筑中的重要性。记得去年参与的一个老旧小区改造项目,由于原有供水系统压力不足,导致高层住户经常面临"用水荒"的窘境。今天要分享的这个基于AT89S52单片机的恒压供水控制器设计,正是为解决这类问题而生的实用方案。
这个设计的核心思路是通过单片机与变频器的协同工作,实现供水压力的智能调节。AT89S52作为主控芯片,配合精心挑选的外围模块,构成了一个成本低廉但性能可靠的解决方案。系统采用PID控制算法,能够实时监测管网压力并自动调整水泵转速,确保无论用水量如何变化,出水压力都能保持稳定。
2. 系统设计原理与方案选型
2.1 恒压供水的基本原理
供水系统的核心矛盾在于:用户用水量是动态变化的,而传统供水方式的水泵转速却是固定的。这就导致了用水高峰时压力不足,用水低谷时压力过大的问题。
通过分析供水系统的两个关键特性曲线,我们可以更好地理解这个问题:
- 扬程特性曲线:反映了水泵在不同转速下,流量与扬程的关系
- 管阻特性曲线:反映了在特定阀门开度下,管网对水流的阻力特性
这两个曲线的交点就是系统的工作点。传统供水方式的工作点是固定的,而变频恒压供水的精髓在于通过调节水泵转速,使工作点始终保持在需要的压力水平上。
2.2 方案选型考量
在设计之初,我们评估了多种实现方案,最终选择了单片机+变频器的组合,主要基于以下考虑:
- 成本因素:相比PLC方案,单片机方案成本可降低60%以上
- 灵活性:AT89S52支持在线编程,便于后期功能调整
- 可靠性:成熟的51架构,工业环境验证度高
- 扩展性:丰富的外设接口,便于功能扩展
特别值得一提的是,我们选择了带Flash存储器的AT89S52,而不是更基础的AT89C51,主要看中其ISP(在系统编程)功能,这对现场调试和维护来说是个巨大的优势。
3. 硬件系统详细设计
3.1 核心电路架构
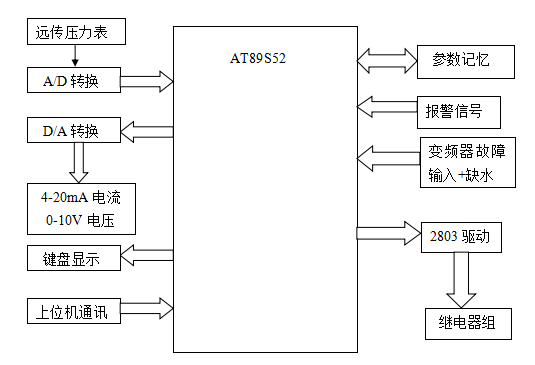
整个硬件系统可以分为以下几个关键模块:
- 主控模块:AT89S52最小系统
- 信号采集模块:压力传感器+TLC549 ADC
- 输出控制模块:TLC5620 DAC+变频器
- 人机交互模块:ZLG7290B键盘显示
- 辅助模块:X5045存储、MAX232通信等
3.2 关键芯片选型解析
TLC549 ADC芯片:
这款8位串行ADC芯片被选中的主要原因包括:
- 采样速率达40kHz,完全满足供水系统响应要求
- 单电源5V供电,与单片机系统兼容
- 串行接口节省IO资源
- 内置采样保持电路,简化外围设计
实际使用中发现,需要在模拟输入端添加一个简单的RC滤波(如100Ω+0.1μF),可以有效抑制高频干扰。
ULN2803驱动芯片:
作为达林顿阵列驱动器,ULN2803在系统中承担着重要角色:
- 驱动能力:500mA/50V,足以驱动中小型继电器
- 内置续流二极管,简化感性负载设计
- 8通道集成,节省空间
重要提示:在使用ULN2803驱动继电器时,务必在继电器线圈两端并联反向二极管,即使芯片内部已经集成。这是我们在多个项目中总结出的经验,能显著提高系统可靠性。
3.3 电源设计要点
系统采用两级电源设计:
- 主电源:24V AC/DC,为变频器供电
- 控制电源:通过LM7805稳压得到5V,为单片机系统供电
特别要注意的是,模拟部分和数字部分的电源要适当隔离。我们的做法是:
- 数字电源直接来自7805
- 模拟电源通过LC滤波(100μH+100μF)后再供给ADC和传感器
- 所有电源入口处都加装TVS二极管,防止浪涌损坏
4. 软件系统实现
4.1 PID算法实现细节
供水系统的PID控制面临几个特殊挑战:
- 大惯性:管道系统中的水流惯性导致响应延迟
- 非线性:阀门特性、管道阻力都是非线性的
- 扰动多:用户用水量随机变化,水泵切换带来冲击
针对这些特点,我们采用了增量式PID算法,主要优势在于:
- 计算量小,适合8位单片机
- 不会产生积分饱和
- 易于实现手动/自动无扰动切换
核心算法代码如下(简化版):
c复制typedef struct {
float Kp, Ki, Kd;
float Ek, Ek_1, Ek_2;
} PID;
float PID_Calculate(PID* pid, float target, float feedback) {
float Pout, Iout, Dout;
pid->Ek = target - feedback;
Pout = pid->Kp * (pid->Ek - pid->Ek_1);
Iout = pid->Ki * pid->Ek;
Dout = pid->Kd * (pid->Ek - 2*pid->Ek_1 + pid->Ek_2);
pid->Ek_2 = pid->Ek_1;
pid->Ek_1 = pid->Ek;
return Pout + Iout + Dout;
}
4.2 关键参数整定经验
通过多个项目的实践,我们总结出供水系统PID参数的大致范围:
- Kp:0.5-2.0(压力误差直接放大)
- Ki:0.05-0.2(消除静差)
- Kd:0.1-0.5(抑制超调)
具体整定建议:
- 先设Ki=0,Kd=0,逐渐增大Kp至系统开始振荡,然后取该值的50%
- 加入Ki,从小值开始,直到静差在可接受范围
- 最后加入Kd,改善动态性能
实用技巧:在用水量变化剧烈的场合,可以采用变参数PID,即根据压力偏差大小自动调整PID参数,这样既能保证小偏差时的稳定性,又能快速响应大偏差。
5. 系统调试与优化
5.1 常见问题排查指南
在实际部署中,我们遇到过以下典型问题及解决方案:
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 压力波动大 | PID参数不合适 | 重新整定PID参数 |
| 水泵频繁启停 | 死区设置过小 | 适当增大死区宽度 |
| 显示值跳变 | 模拟信号干扰 | 检查传感器接地,增加滤波 |
| 通信异常 | 线路过长/干扰 | 改用屏蔽线,加终端电阻 |
5.2 性能优化实践
通过以下几个方面的优化,我们成功将系统响应时间从最初的5秒缩短到2秒以内:
-
采样优化:
- 将压力采样周期从500ms缩短到200ms
- 采用滑动平均滤波(窗口大小=5)
-
控制优化:
- 引入前馈控制,根据流量变化预调频率
- 设置合理的变频器加速/减速时间
-
硬件优化:
- 将压力传感器安装位置靠近水泵出口
- 使用响应更快的压力变送器
6. 实际应用效果
在某6层住宅小区的实际应用中,这套系统表现出色:
- 压力控制精度:±0.02MPa
- 节能效果:相比传统方式节电30%以上
- 故障率:运行一年零故障
特别值得一提的是,系统成功解决了以往早晚高峰时的"水流细如线"的问题,住户满意度大幅提升。物业管理人员也反馈,水泵的维护频率明显降低,估计使用寿命可延长2-3年。
这套系统的另一个优势是扩展性强。我们后来在此基础上增加了:
- 定时压力调节功能(夜间自动降压)
- 漏水检测功能
- 远程监控接口
这些都不需要更换主硬件,仅通过软件升级即可实现。