
1. 项目概述与设计思路
作为一名从事嵌入式开发多年的工程师,我最近完成了一个基于STC89C52单片机的电梯控制系统项目。这个系统不仅实现了基本的楼层呼叫和运行控制功能,还加入了超载报警和故障检测等实用特性。选择STC89C52作为主控芯片,主要是看中它的高性价比和丰富的外设接口,特别适合这种需要稳定运行但又对成本敏感的控制场景。
电梯控制系统本质上是一个典型的嵌入式实时控制系统,需要处理多路输入信号(按钮、传感器),并根据预设逻辑控制输出(电机、显示、报警)。在设计之初,我就明确了几个核心需求:首先是可靠性,电梯作为特种设备必须保证绝对安全;其次是实时性,对楼层呼叫的响应要迅速;最后是易维护性,系统要便于调试和故障排查。
2. 硬件系统设计与实现
2.1 主控芯片选型与电路设计
2.1.1 STC89C52核心特性解析
STC89C52是一款基于8051内核的8位单片机,具有8KB Flash存储器和512B RAM。我选择DIP40封装主要是考虑到以下几点:
- 直插式封装便于手工焊接和调试,特别适合原型开发阶段
- 工作电压范围宽(3.4V-5.5V),抗干扰能力强
- 内置看门狗定时器,提高系统可靠性
- 32个可编程I/O口完全满足电梯控制需求
实际使用中发现,STC89C52的P0口需要外接上拉电阻(我用了10kΩ排阻),否则无法正常输出高电平。这是很多新手容易忽略的关键细节。
2.1.2 最小系统搭建要点
一个可靠的单片机最小系统必须包含以下三个部分:
- 电源电路:采用AMS1117-5.0稳压芯片,输入12V转换为稳定的5V
- 复位电路:经典的RC复位(10kΩ电阻+10μF电容)
- 时钟电路:11.0592MHz晶振配合30pF负载电容
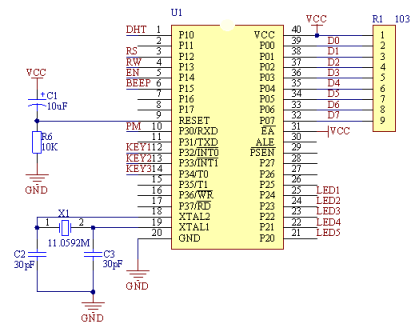
图:实际搭建的最小系统电路,注意晶振要尽量靠近单片机引脚
2.2 外围电路设计细节
2.2.1 输入信号处理电路
电梯系统需要处理多种输入信号:
- 楼层按钮:采用矩阵键盘扫描方式,节省I/O资源
- 限位开关:光电传感器信号经过74HC14施密特触发器整形
- 超载传感器:压力传感器信号通过LM358放大后输入ADC
2.2.2 输出驱动电路设计
- 电机控制:使用L298N驱动模块控制直流电机
- 楼层显示:采用74HC595驱动4位共阳数码管
- 报警指示:蜂鸣器通过PNP三极管驱动
调试中发现电机启停时会产生较大电压波动,后来在电源端增加了1000μF电解电容和0.1μF陶瓷电容组合,有效解决了复位问题。
3. 软件系统架构与实现
3.1 主程序流程设计
系统软件采用模块化设计,主程序流程图如下:
c复制void main() {
System_Init(); // 硬件初始化
while(1) {
Key_Scan(); // 按键扫描
Sensor_Read(); // 传感器读取
Control_Logic(); // 控制逻辑处理
Display_Update(); // 显示更新
}
}
3.1.1 关键功能实现
- 楼层调度算法:采用LOOK算法(电梯运行方向不变直到无请求)
- 故障检测机制:定时检查各传感器状态,异常时进入安全模式
- 抗抖动处理:按钮信号采用状态机方式处理,防抖时间50ms
3.2 实时性保障措施
为确保系统实时响应,采取了以下策略:
- 将控制逻辑放在定时中断中执行(10ms周期)
- 按键扫描使用状态机而非延时消抖
- 重要标志变量使用volatile关键字声明
c复制void Timer0_ISR() interrupt 1 {
static uint8_t cnt = 0;
TH0 = 0xDC; TL0 = 0x00; // 重装10ms定时
if(++cnt >= 5) { // 每50ms执行一次
cnt = 0;
Key_State_Update();
}
Motor_Control();
}
4. 系统调试与优化
4.1 硬件调试实录
4.1.1 静态测试要点
- 目测检查:焊点是否饱满,有无虚焊/短路
- 通断测试:用万用表检查电源与地之间电阻(正常应>500Ω)
- 电压测量:各芯片供电引脚电压是否正常(5V±5%)
4.1.2 动态调试技巧
- 信号追踪法:用示波器观察关键信号波形(如晶振、PWM)
- 分段测试法:先测试最小系统,再逐步添加外围电路
- 极限测试:模拟电源波动(4.5V-5.5V)观察系统稳定性
4.2 常见问题解决方案
| 故障现象 | 可能原因 | 解决方法 |
|---|---|---|
| 数码管显示不全 | 限流电阻过大 | 减小段选电阻至220Ω |
| 电机启动时复位 | 电源容量不足 | 增加储能电容 |
| 按键响应迟钝 | 消抖时间过长 | 调整消抖时间为30ms |
| 楼层定位不准 | 限位开关松动 | 重新固定并校准位置 |
5. 项目总结与进阶建议
经过完整开发周期,这个电梯控制系统最终实现了以下指标:
- 响应时间:楼层呼叫到响应<200ms
- 定位精度:停靠误差<±5mm
- 连续运行:72小时无故障
几个值得分享的经验:
- 电机控制线最好使用双绞线,可有效抑制干扰
- 程序中使用看门狗时,喂狗间隔要合理设置(建议500ms)
- 对于关键参数(如楼层高度),建议存储在EEPROM中
后续可扩展方向:
- 增加无线遥控功能(如蓝牙/WiFi)
- 实现多电梯协同调度
- 加入能耗监测模块