
1. 项目概述:六步换相法控制BLDC电机
最近在实验室带学生做无刷直流电机(BLDC)控制项目时,发现很多初学者在六步换相法的实现上频频踩坑。今天我就用Simulink搭建一个完整的仿真模型,带大家看看电流是如何像"跳踢踏舞"一样精准控制电机转动的。
六步换相法(又称梯形波控制)是BLDC电机最基础也最实用的控制方式。它的核心思想是根据转子位置传感器的信号,按固定顺序切换逆变器功率管的导通状态,使定子磁场始终"追逐"转子磁场。这种控制方式硬件实现简单、可靠性高,特别适合电动工具、无人机电调等对成本敏感的应用场景。
2. 仿真模型架构设计
2.1 整体模型框架
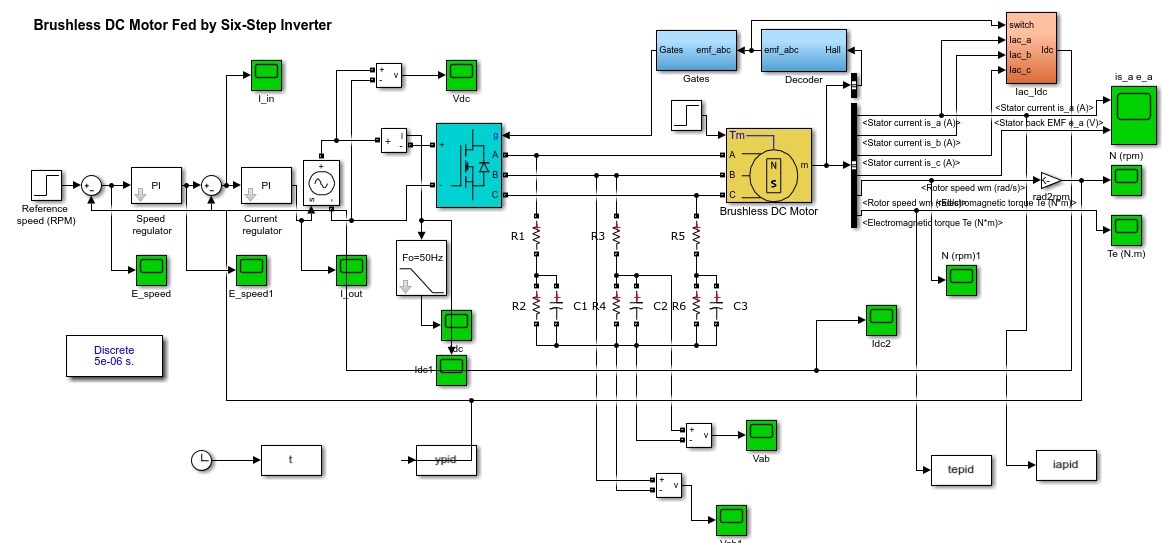
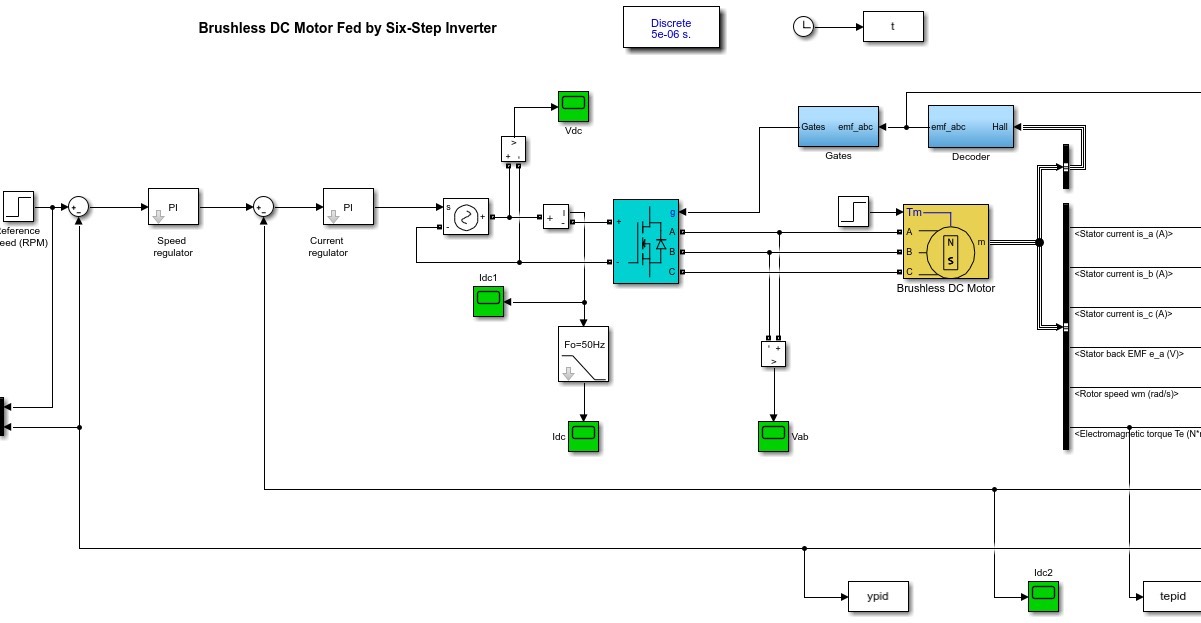
我们的Simulink模型包含以下关键模块:
- 三相全桥逆变器(Universal Bridge)
- BLDC电机本体模块
- 霍尔传感器及信号处理
- 换相逻辑控制器(Truth Table实现)
- PWM生成与速度环PI调节器
模型采用分层设计,信号流向清晰可见。这种结构既便于调试,也方便后续扩展为更复杂的FOC控制算法。
2.2 换相逻辑实现
换相逻辑是整个系统的"大脑"。在Simulink中,我强烈推荐使用Truth Table模块而非脚本实现,因为:
- 真值表形式直观展示霍尔信号与功率管状态的映射关系
- 修改换相顺序时只需调整表格内容,无需重写代码
- 仿真时可直接观察每个状态的持续时间
配置示例:
matlab复制truth_table = [
1 0 1 0 0 1; % Sector 1: Q1,Q4,Q5导通
0 1 1 1 0 0; % Sector 2: Q2,Q3,Q4导通
0 1 0 1 1 0; % Sector 3: Q2,Q5,Q6导通
1 0 0 0 1 1; % Sector 4: Q3,Q6,Q1导通
1 1 0 0 1 0; % Sector 5: Q3,Q4,Q6导通
0 0 1 1 0 1 % Sector 6: Q5,Q6,Q2导通
];
注意:真值表的行顺序必须与霍尔信号编码顺序严格对应。常见错误是Sector编号与霍尔信号不匹配导致电机反转或抖动。
3. 关键参数配置与调试技巧
3.1 死区时间设置
逆变器模块最关键的参数是死区时间(Dead Time)。这个参数设置不当会导致:
- 死区过小:上下管直通短路,炸管风险高
- 死区过大:输出电压畸变,电机转矩脉动明显
经验公式:
code复制死区时间 ≥ 功率管关断延迟 + 栅极驱动传播延迟 + 安全裕量
对于常见的MOSFET驱动电路,2μs是个安全的起点。在Universal Bridge模块中配置:
matlab复制DeadTime = 2e-6; % 单位:秒
GateLogic = 'Positive'; % 正逻辑驱动
3.2 速度环PI参数整定
速度环调节直接影响动态响应。推荐采用工程整定法:
- 先将Ki设为0,逐步增大Kp直到出现等幅振荡
- 记录此时的临界增益Kc和振荡周期Tc
- 按Ziegler-Nichols公式计算:
matlab复制Kp = 0.6*Kc; Ki = 2*Kp/Tc; - 加入抗饱和(Anti-Windup)系数防止积分饱和:
matlab复制AntiWindup = 0.6~0.8; % 典型值
实测案例:对于24V/3000rpm的BLDC电机,最终采用的参数为:
matlab复制Kp = 0.15;
Ki = 2.5;
AntiWindup = 0.7;
4. 波形分析与故障排查
4.1 正常波形特征
健康的BLDC系统应呈现以下波形特征:
- 反电动势:平顶梯形波,转折点与换相时刻对齐
- 相电流:马鞍形包络,幅值随负载平稳变化
- 转速响应:阶跃负载下超调量<10%,恢复时间<100ms
图示:理想的反电动势波形应像被刀切过的梯形
4.2 常见异常及解决方法
问题1:电流波形畸变
- 现象:电流出现尖峰或振荡
- 可能原因:
- 死区时间不足
- 换相点提前/滞后
- 母线电容容量不足
- 解决方案:
- 用Powergui做FFT分析谐波成分
- 调整霍尔传感器的相位补偿参数:
matlab复制PhaseOffset = pi/6; % 30度电角度补偿
问题2:转速波动大
- 现象:空载转速周期性波动
- 可能原因:
- PI参数不匹配
- PWM频率与机械谐振耦合
- 解决方案:
- 尝试改变PWM频率(如从10kHz→8kHz)
- 在速度反馈通道加入低通滤波
5. 鲁棒性测试与实际应用
5.1 电压跌落测试
BLDC电机最突出的优点就是电压适应性强。在模型中我们可以模拟电池电压下降的场景:
- 设置母线电压从24V阶跃到18V(降幅25%)
- 观察转速响应:
- 优质控制下转速应快速稳定到新平衡点
- 转矩维持能力下降但不应失步
图示:电压突降时的转速恢复过程
5.2 工程应用技巧
-
霍尔传感器安装:
- 使用示波器比对反电动势过零点与霍尔跳变沿
- 机械安装偏差可通过PhaseOffset参数软件补偿
-
低成本方案优化:
- 用比较器替代ADC检测反电动势
- 采用单电阻电流采样+重构算法
-
电磁兼容(EMC)处理:
- 每个MOSFET并联100nF陶瓷电容
- 电机线套磁环抑制辐射