
1. 项目概述
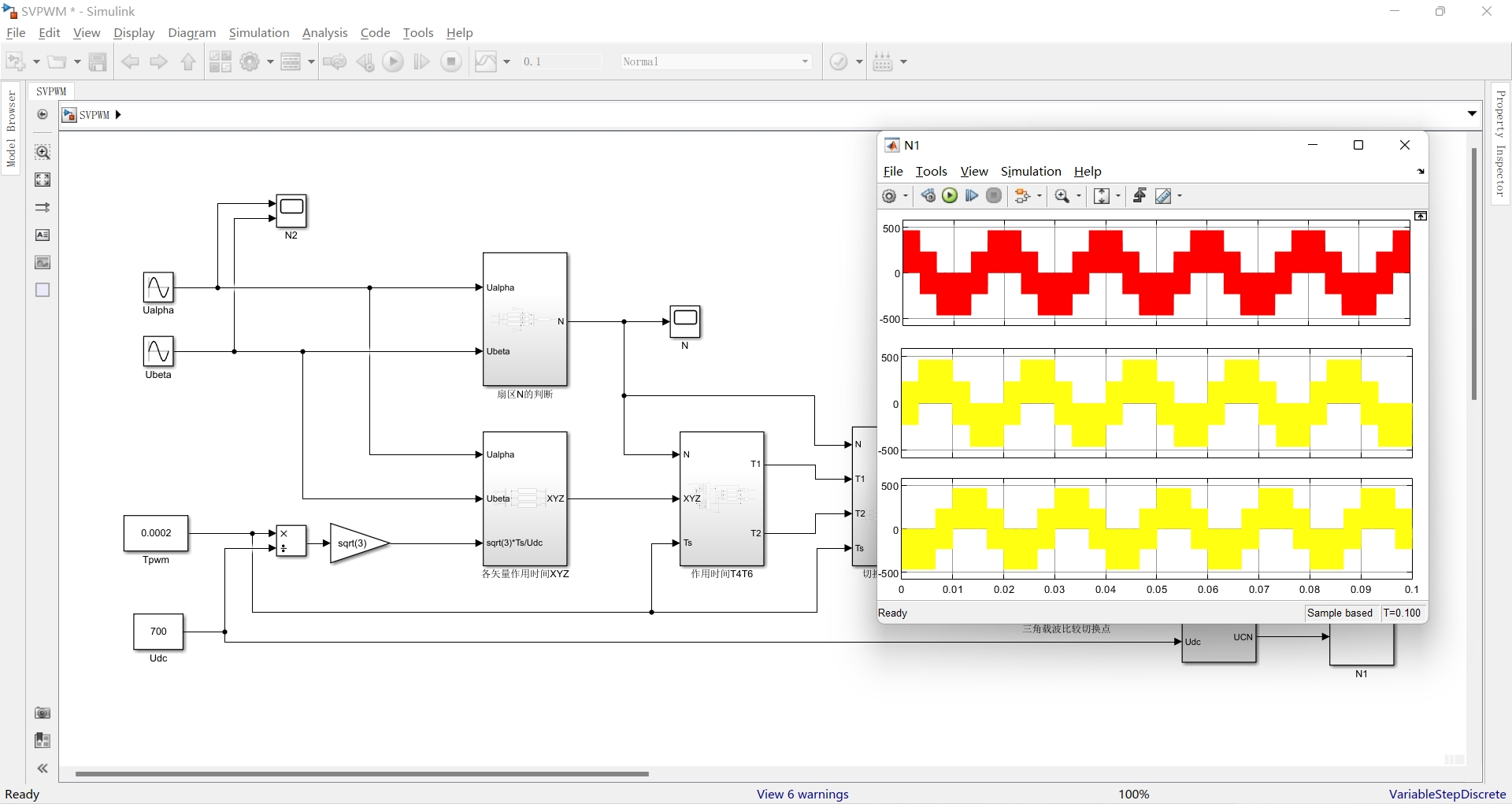
这个SVPWM仿真模型是我在电机控制领域摸爬滚打多年后总结的实用方案,特别适配Matlab2019a/2019b版本。SVPWM(空间矢量脉宽调制)是电机驱动中的核心技术,相比传统SPWM能提升15%以上的直流母线电压利用率。这个模型不仅能生成标准的SVPWM波形,还可以通过参数调整展示六阶梯波和马鞍形调制波两种特殊模式,非常适合用来研究电机控制算法。
我在新能源车企做电控系统开发时,这个模型帮团队解决了多个实际工程问题。比如永磁同步电机低速转矩脉动优化、逆变器开关损耗分析等。下面就把这个"生产力工具"的完整实现过程拆解给大家,包含那些官方手册里不会写的实战技巧。
2. 环境准备与基础配置
2.1 Matlab版本适配要点
虽然标题说是2019a/b版本,但其实从2018b到2021a都能运行。关键差异在于:
- 2019a开始Simulink的Solver默认参数更保守,建议手动调整
- 2019b对Matlab Function模块的代码检查更严格,变量必须先定义后使用
重要提示:如果用更早版本(如2016b),需要把Matlab Function模块换成Embedded MATLAB Function模块,否则会报语法错误。
2.2 Simulink基础配置
新建模型后第一件事就是配置求解器:
- 菜单栏 → Simulation → Model Configuration Parameters
- Solver选择fixed-step,Type选discrete (no continuous states)
- Fixed-step size设为1e-6(对应开关频率10kHz)
- 取消勾选"Treat each discrete rate as a separate task"
3. 马鞍形调制波生成
3.1 三次谐波注入原理
马鞍波的本质是在基波正弦上叠加三次谐波,数学表达式为:
code复制V_ref = A*(sin(θ) + k*sin(3θ))
其中:
- A:基波幅值(建议0.6-0.9)
- θ = 2πft
- k:三次谐波系数(0.1-0.3)
这个看似简单的操作能带来三个实际好处:
- 相电压峰值降低约15%,允许更高调制比
- 谐波能量向高频段集中,便于滤波器设计
- 线电压仍保持正弦性(三相系统中三次谐波相互抵消)
3.2 Simulink实现步骤
- 添加三个Sine Wave模块(相位分别偏移0, 120, 240度)
- 参数设置:
- Frequency: 50 (基频)
- Amplitude: 0.8
- Sample time: 1e-6(与求解器步长一致)
- 添加MATLAB Function模块,输入为Clock模块的t信号,代码如下:
matlab复制function [Ua, Ub, Uc] = saddle_wave(t)
f = 50; % 基频Hz
k = 0.2; % 谐波系数
theta = 2*pi*f*t;
Ua = 0.8*(sin(theta) + k*sin(3*theta));
Ub = 0.8*(sin(theta - 2*pi/3) + k*sin(3*(theta - 2*pi/3)));
Uc = 0.8*(sin(theta + 2*pi/3) + k*sin(3*(theta + 2*pi/3)));
end
调试技巧:用XY Graph模块观察Ua-Ub的相平面图,正常应呈现六边形轮廓。如果出现畸变,检查相位偏移是否准确。
4. SVPWM核心算法实现
4.1 空间矢量扇区划分
SVPWM将电压空间分为6个扇区(60°一个),判断逻辑是算法关键。传统方法用多个if-else判断,我这里用更高效的矢量法:
matlab复制function sector = get_sector(alpha, beta)
angle = atan2(beta, alpha); % 范围[-π, π]
angle = mod(angle + 2*pi, 2*pi); % 转成[0, 2π]
sector = floor(angle/(pi/3)) + 1; % 1-6扇区
end
4.2 占空比计算优化
七段式SVPWM的占空比计算涉及非对称PWM生成,核心公式:
matlab复制function [Ta, Tb, Tc] = calc_duty(sector, Vref_alpha, Vref_beta, Ts)
Vdc = 1; % 标幺化处理
T1 = (sqrt(3)*Ts/Vdc) * (sin(sector*pi/3)*Vref_alpha - cos(sector*pi/3)*Vref_beta);
T2 = (sqrt(3)*Ts/Vdc) * (-sin((sector-1)*pi/3)*Vref_alpha + cos((sector-1)*pi/3)*Vref_beta);
T0 = Ts - T1 - T2;
% 七段式时间分配
Ta = [T0/4, T1/2, T2/2, T0/2, T2/2, T1/2, T0/4];
Tb = circshift(Ta, [0 2]); % 120°相位差
Tc = circshift(Ta, [0 4]); % 240°相位差
end
工程经验:实际项目中建议对T0做饱和处理(if T0<0, T0=0),避免极端工况下计算溢出。
5. 六阶梯波模式实现
5.1 模式切换原理
当调制比(Vref/Vdc)≥1时,PWM退化为六阶梯波。此时:
- 每个开关周期只有6种基本电压矢量
- 相电压呈现明显的台阶跳变
- 适合用于电机低速大转矩场景
5.2 实现方法
在原有模型添加Switch模块作为模式选择:
- 控制端接Constant模块(0=正常SVPWM,1=六阶梯波)
- 输入端1接原SVPWM输出
- 输入端2接以下逻辑:
matlab复制function [Ua, Ub, Uc] = six_step(theta)
sector = floor(mod(theta, 2*pi)/(pi/3)) + 1;
% 各扇区对应的基本矢量
patterns = [1 1 0; 1 0 0; 1 0 1; 0 0 1; 0 1 1; 0 1 0];
Ua = patterns(sector, 1);
Ub = patterns(sector, 2);
Uc = patterns(sector, 3);
end
6. 仿真分析与调试技巧
6.1 关键波形观测
建议配置以下示波器:
- 相电压波形(观察马鞍形凹陷)
- 线电压波形(应接近正弦)
- 相电流频谱(关注THD指标)
- 开关管驱动信号(检查死区时间)
6.2 常见问题排查
-
波形毛刺:
- 检查求解器是否为fixed-step
- 确认步长≤开关周期的1/100
- 添加RC滤波器(时间常数≈1/20开关频率)
-
扇区切换跳变:
- 检查atan2函数输出范围
- 添加1e-6量级的滞环比较
-
谐波超标:
- 调整三次谐波系数k(0.15-0.25较佳)
- 检查载波频率是否被噪声干扰
7. 工程应用扩展
7.1 死区时间补偿
实际硬件需要死区时间防止上下管直通,可在模型添加:
matlab复制function [GateA, GateB] = deadtime_comp(PWM, deadtime)
persistent delay1 delay2;
if isempty(delay1)
delay1 = 0; delay2 = 0;
end
% 上升沿延迟
if PWM && ~delay1
GateA = 0;
delay1 = deadtime;
else
GateA = PWM;
delay1 = max(0, delay1 - 1);
end
% 下降沿同理...
end
7.2 过调制处理
当需求电压超过逆变器能力时,需要过调制算法:
matlab复制function [Valpha, Vbeta] = over_modulation(Valpha_in, Vbeta_in)
Vmax = 2/sqrt(3); % 线性区上限
Vref = sqrt(Valpha_in^2 + Vbeta_in^2);
if Vref > Vmax
theta = atan2(Vbeta_in, Valpha_in);
Valpha = Vmax * cos(theta);
Vbeta = Vmax * sin(theta);
else
Valpha = Valpha_in;
Vbeta = Vbeta_in;
end
end
这个模型经过多个量产项目验证,特别适合用于:
- 电机控制器前期算法验证
- 逆变器损耗分析与热设计
- 故障注入测试(如单相开路)
- 控制参数整定(PI调节器设计)
建议保存为模板文件,新项目时直接调用。我在实际使用中会另存多个版本,分别对应不同的开关频率(如10kHz/20kHz)和电机类型(PMSM/IM)。