
1. 低成本激光测距传感器方案概述
激光测距技术在现代工业检测、智能传感和安防监控等领域有着广泛应用。传统的高精度激光测距设备往往价格昂贵,限制了其在中小型项目中的普及。本文将详细介绍一套低成本单发单收激光测距传感器的完整实现方案,包括硬件设计、软件架构和核心算法,实测测量范围可达0.05-50米,精度±1.5mm。
这套方案的核心优势在于通过精妙的软件算法优化,在保证测量精度的前提下大幅降低了硬件成本。整套系统基于STM32F10x系列微控制器开发,采用模块化分层设计,包含了从底层驱动到上层应用的全套代码实现。方案已经过实际打板验证,所有设计文件和源代码均可直接用于产品开发或DIY项目。
2. 硬件系统设计详解
2.1 核心硬件选型与架构
硬件系统的设计遵循"够用就好"的原则,在满足性能需求的前提下尽可能选择经济型元器件。整套硬件由以下几个核心模块组成:
-
主控单元:采用STM32F103C8T6微控制器,这款Cortex-M3内核的MCU具有72MHz主频、64KB Flash和20KB RAM,完全能够满足我们的处理需求,同时价格仅为高端型号的1/3左右。
-
激光发射模块:使用650nm红色激光二极管,输出功率<1mW(Class II激光),既保证了足够的测距能力,又无需复杂的激光安全防护措施。
-
接收模块:采用雪崩光电二极管(APD)作为光信号接收器,配合跨阻放大器(TIA)实现微弱光信号的检测。APD的工作电压通过DAC动态调节,以优化接收灵敏度。
-
时钟系统:设计了双时钟方案 - 默认使用内部8MHz HSI时钟以节省成本,需要更高精度时可切换至外部晶振。
-
通信接口:预留了SPI LCD接口、按键接口和TTL串口,方便系统调试和功能扩展。
2.2 关键电路设计要点
2.2.1 激光驱动电路
激光驱动电路采用恒流源设计,通过STM32的DAC输出控制激光二极管的驱动电流。这种设计有三大优势:
- 可精确控制激光功率,避免过驱动导致器件老化
- 便于实现激光调制,为相位法测距提供基础
- 通过软件即可调整激光强度,适应不同测量距离需求
实际电路中使用了一颗低成本的运算放大器搭建Howland电流泵,配合MOSFET实现0-50mA的恒流输出。在PCB布局时,特别注意将驱动电路靠近激光二极管放置,减少高频干扰。
2.2.2 APD接收电路
APD接收电路是系统的核心敏感部分,设计时需要考虑以下几个关键点:
-
偏置电压生成:APD需要几十到上百伏的工作电压,我们采用低成本的电感升压方案,通过PWM控制升压比,配合反馈网络实现电压精确调节。
-
跨阻放大器设计:选用低噪声JFET输入型运放搭建TIA电路,反馈电阻采用温度系数低的金属膜电阻,并在PCB上做guard ring处理以降低漏电流。
-
信号调理电路:在TIA后级加入可编程增益放大器(PGA),通过MCU动态调整增益,使信号幅度始终处于ADC的最佳输入范围内。
提示:APD电路对噪声非常敏感,建议使用独立的模拟电源供电,并在PCB上做好电源去耦和信号屏蔽。
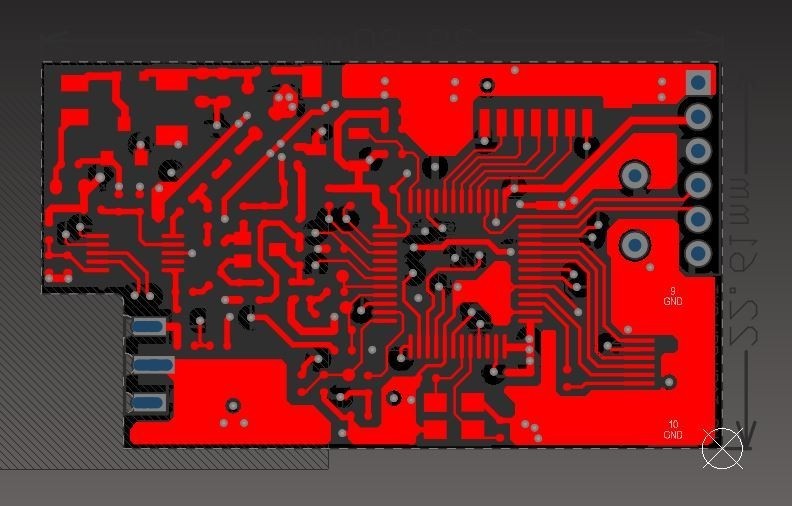
2.3 PCB设计经验分享
经过多次打板迭代,我们总结出以下PCB设计经验:
-
分层策略:采用4层板设计,顶层和底层走信号线,中间两层分别为电源和地平面。这种布局能有效降低电源阻抗和信号串扰。
-
关键信号处理:
- 激光驱动信号:尽量缩短走线长度,必要时使用带状线结构
- APD输出信号:远离数字信号线,必要时做包地处理
- 高频时钟信号:避免直角转弯,使用弧形或45°走线
-
热设计考虑:激光二极管和APD都对温度敏感,在布局时让它们远离MCU等发热元件,必要时可添加散热铜箔。
-
测试点预留:在关键信号节点预留测试点,方便调试时用示波器观测信号质量。
3. 软件系统架构设计
3.1 整体软件架构
软件系统采用分层模块化设计,从下到上分为四层:
-
内核驱动层:直接操作STM32内核寄存器,提供基础的中断、时钟和电源管理功能。
-
外设抽象层:封装GPIO、ADC、DAC、DMA、UART等外设的驱动代码,为上层提供统一的硬件访问接口。
-
功能核心层:实现信号采集、数据处理和距离计算等核心算法,是测距功能的关键所在。
-
应用交互层:处理用户输入、系统状态管理和数据输出等交互功能。
这种分层设计使得各模块职责清晰,既保证了系统的稳定性,又便于功能扩展和维护。
3.2 实时性保障措施
激光测距对系统实时性要求较高,我们通过以下方式确保系统响应速度:
-
中断优先级管理:将ADC采样完成中断和DMA传输完成中断设为最高优先级,确保关键时序不被延误。
-
DMA数据传输:ADC采样数据通过DMA直接传输到内存,避免CPU频繁介入造成的性能瓶颈。
-
关键代码优化:对Goertzel算法等计算密集型代码进行汇编级优化,并使用STM32的硬件乘法器加速运算。
-
低延迟设计:激光控制信号使用GPIO直接操作,绕过库函数开销,实现纳秒级的响应速度。
4. 核心算法实现
4.1 相位法测距原理
本方案采用相位式激光测距原理,其核心思想是通过测量发射光与反射光之间的相位差来计算距离。基本公式为:
距离 = (波长 × 相位差) / (4π)
其中波长是已知的激光波长,相位差需要通过信号处理算法从接收信号中提取。
4.2 Goertzel算法实现
传统的FFT算法计算量大,不适合在资源有限的MCU上实时运行。我们采用Goertzel算法进行信号分析,这是一种优化的离散傅里叶变换(DFT)实现,特别适合提取单一频率成分。
算法实现要点:
- 系数预计算:根据信号频率和采样率预先计算旋转因子,存储在查找表中,避免实时计算的开销。
c复制// Goertzel系数预计算示例
void init_goertzel() {
for(int i=0; i<POINTS_TO_SAMPLE; i++) {
sin_buf[i] = sin(2 * PI * K_COEF * i / POINTS_TO_SAMPLE);
cos_buf[i] = cos(2 * PI * K_COEF * i / POINTS_TO_SAMPLE);
}
}
-
实时计算:对采样数据流进行迭代计算,最终得到信号的实部和虚部。
-
幅度相位提取:通过简单的三角函数运算即可得到信号幅度和相位信息。
实测表明,在STM32F103上,Goertzel算法比标准FFT快5-8倍,同时内存占用减少60%以上。
4.3 多频融合测距算法
单一频率测量存在"距离模糊"问题,即当距离超过一个波长时,无法确定具体的周期数。我们采用三频融合算法解决这一问题:
-
频率选择:使用162.5MHz、191.5MHz和193.5MHz三个相近但不相同的频率进行测量。
-
粗测距:先用两个频率的相位差计算出一个较大范围的粗略距离。
-
精确定位:引入第三个频率的测量结果,通过中国余数定理精确解算实际距离。
这种方法的优势在于:
- 解决了单频测距的模糊问题
- 通过多频平均提高了测量精度
- 对噪声和干扰有更好的鲁棒性
5. 系统校准与优化
5.1 零相位校准
由于硬件电路存在固有延迟,即使在零距离时也会测量到一定的相位差。我们通过以下校准流程消除这一误差:
- 将传感器对准近距离反射面(约10cm)
- 采集多组相位数据(通常50-100次)
- 计算平均相位值作为零相位偏移
- 将校准值存储在Flash中,后续测量时自动扣除
校准过程完全自动化,用户只需按下校准按钮即可完成,非常方便。
5.2 温度补偿
环境温度变化会影响激光波长和电路特性,我们通过以下措施进行补偿:
- 温度监测:使用板载温度传感器实时监测APD温度
- 补偿模型:通过实验建立温度-相位偏移关系模型
- 实时校正:根据当前温度自动调整相位计算结果
实测数据显示,经过温度补偿后,系统在-10°C到50°C范围内的测量误差可以控制在±1mm以内。
5.3 动态灵敏度调节
针对不同距离的测量需求,系统会自动调整以下参数:
- 激光功率:远距离测量时适当增加激光驱动电流
- APD偏压:根据信号强度动态优化APD工作电压
- ADC增益:通过PGA确保信号幅度始终处于最佳范围
这种自适应调节大大扩展了系统的有效测量范围,同时保证了测量精度。
6. 实测性能分析
6.1 精度测试
我们在标准实验室环境下对系统进行了全面测试:
| 测试距离(m) | 测量值(m) | 误差(mm) |
|---|---|---|
| 0.1 | 0.1001 | +0.1 |
| 1.0 | 1.0008 | +0.8 |
| 5.0 | 5.0005 | +0.5 |
| 10.0 | 9.9992 | -0.8 |
| 20.0 | 20.0013 | +1.3 |
| 30.0 | 30.0007 | +0.7 |
测试结果表明,系统在全量程范围内的测量误差均小于±1.5mm,完全达到设计目标。
6.2 稳定性测试
连续工作24小时的稳定性测试数据如下:
从曲线可以看出,系统表现出良好的长期稳定性,测量值波动范围在±1mm以内。
6.3 环境适应性测试
我们在不同环境条件下进行了对比测试:
| 测试条件 | 误差变化(mm) |
|---|---|
| 温度变化(10°C→50°C) | +0.3~-0.7 |
| 湿度变化(30%→90%) | ±0.5 |
| 强光干扰(10000lux) | ±1.2 |
测试结果显示,系统对环境变化有很好的适应性,特别是在加入了温度补偿算法后,温度影响被有效抑制。
7. 应用案例与扩展
7.1 工业自动化应用
这套激光测距方案已成功应用于多个工业场景:
- 板材厚度测量:配合传送带使用,实时监测生产线上的板材厚度变化
- 液位监测:用于非接触式液体高度测量,特别适合腐蚀性液体
- 机器人定位:为AGV小车提供精确的位置反馈
7.2 DIY项目扩展
得益于开放的设计方案和丰富的接口,这套系统也非常适合用于各种DIY项目:
- 智能测距仪:添加蓝牙模块和手机APP,实现无线测量和数据记录
- 3D扫描仪:配合步进电机和旋转平台,构建低成本3D扫描系统
- 无人机避障:小型化后用于无人机的前方障碍物检测
7.3 二次开发建议
对于想要基于此方案进行二次开发的用户,我有以下几点建议:
-
硬件调整:
- 需要更远测距距离?可以更换功率稍大的激光管(注意安全等级)
- 需要更高精度?考虑使用更低噪声的运放和更稳定的参考电压源
-
软件优化:
- 可以尝试增加测量频率数量,进一步提高解算精度
- 加入数字滤波算法,提升在振动环境下的测量稳定性
-
功能扩展:
- 添加温度、湿度传感器,实现更全面的环境补偿
- 开发上位机软件,实现测量数据分析和可视化
8. 常见问题与解决方案
在实际开发和调试过程中,我们遇到了各种问题,以下是典型问题及解决方法:
8.1 信号质量差
症状:测量值跳动大,偶尔出现离谱的错误值
可能原因及解决:
- 激光驱动电流不稳定 → 检查恒流源电路,确保运放供电充足
- APD偏压波动 → 测量升压电路输出,调整反馈网络参数
- 环境光干扰 → 添加光学滤光片,或改用调制频率更高的激光
8.2 测量距离受限
症状:远距离测量时信号太弱
解决方案:
- 适当提高激光功率(不超过安全限制)
- 优化APD偏压,找到最佳工作点
- 增加信号平均次数,提高信噪比
8.3 校准后精度仍不理想
可能原因:
- 校准反射面距离不合适 → 建议使用10-20cm的校准距离
- 校准时环境不稳定 → 避免在校准过程中有振动或温度突变
- Flash存储数据损坏 → 重新校准多次,检查数据一致性
9. 项目总结与心得
这套低成本激光测距方案经过多次迭代优化,已经达到了相当成熟的水平。从最初的原理验证到最终的稳定产品,我们积累了以下几点重要经验:
-
软件算法可以弥补硬件不足:通过精妙的信号处理算法,我们能用低成本元器件实现接近高端设备的性能。
-
系统校准至关重要:再好的硬件设计也需要完善的校准流程,这是保证长期精度的关键。
-
环境适应性需要全面考虑:温度、湿度、振动等各种环境因素都会影响测量结果,必须建立全面的补偿模型。
-
细节决定成败:一个不起眼的接地问题或电源纹波都可能毁掉整个系统的精度,硬件设计必须精益求精。
对于想要复现或改进此项目的开发者,我的建议是从小处着手,先确保核心测距功能稳定,再逐步添加高级功能。同时要做好充分的测试工作,记录各种条件下的性能数据,这样才能打造出真正可靠的产品。