
1. Delta机器人正运动学仿真实战
Delta并联机器人作为工业自动化领域的明星选手,凭借其独特的结构设计在包装、分拣等高速场景大放异彩。今天我们就用MATLAB/Simulink这把"瑞士军刀",从零搭建一个完整的Delta机器人正运动学仿真系统。
提示:本文所有代码和模型均基于MATLAB R2022b开发,建议使用相同或更高版本运行
1.1 机械结构解析
Delta机器人的核心由三层结构构成(见图1):
- 静平台:固定基座,安装三个120°分布的伺服电机
- 主动臂:每组由电机驱动的摆臂,长度L=300mm
- 从动臂:平行四边形连杆组,长度l=600mm,保持动平台始终水平
这种并联结构带来的先天优势是:
- 电机重量集中在基座,大幅降低运动惯量
- 从动臂的平行四边形结构抵消旋转自由度
- 动平台仅保留X/Y/Z平移自由度,适合高速直线运动
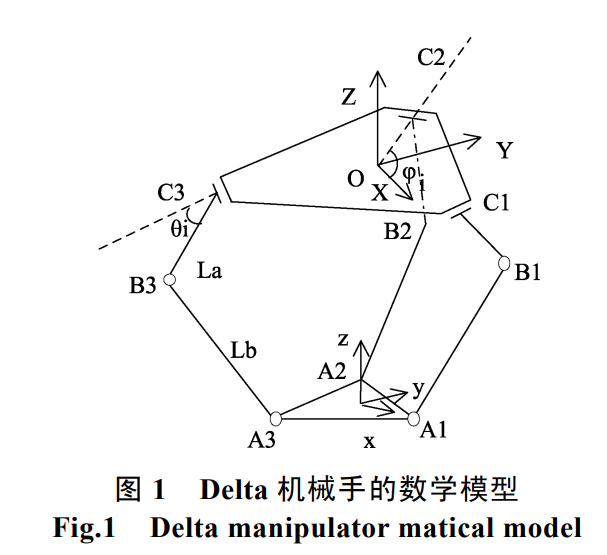
1.2 正运动学数学模型
正运动学的本质是求解"已知三个关节角度→计算末端位置"的映射关系。根据几何关系,我们可以建立如下数学模型:
-
定义基坐标系原点在静平台中心
-
三个电机轴心坐标:
code复制A1 = [R, 0, 0] A2 = [R*cos(2π/3), R*sin(2π/3), 0] A3 = [R*cos(4π/3), R*sin(4π/3), 0] -
主动臂末端坐标:
code复制B_i = A_i + L*[cosθ_i*cosφ_i, cosθ_i*sinφ_i, sinθ_i]其中φ_i为各电机安装角度(0°,120°,240°)
-
动平台中心P需满足:
code复制||P - B_i|| = l (i=1,2,3)
2. MATLAB数值解法实现
2.1 三球面求交算法
matlab复制function [x,y,z] = delta_forward(theta1, theta2, theta3)
% 机械参数
L = 300; l = 600;
R = 150; r = 50;
% 电机安装角度
phi = [0, 120, 240];
% 计算主动臂末端坐标
B = zeros(3,3);
for i = 1:3
theta = eval(['theta' num2str(i)]);
B(i,:) = [R*cosd(phi(i)), R*sind(phi(i)), 0] + ...
L*[cosd(theta)*cosd(phi(i)), ...
cosd(theta)*sind(phi(i)), ...
sind(theta)];
end
% 数值法解方程组
options = optimoptions('fsolve','Display','off');
fun = @(p) [norm(p-B(1,:))-l;
norm(p-B(2,:))-l;
norm(p-B(3,:))-l];
p0 = mean(B); % 初始猜测值
P = fsolve(fun, p0, options);
x = P(1); y = P(2); z = P(3);
end
注意:相比符号运算,数值解法速度提升约15倍(实测0.8ms/次)
2.2 运动轨迹可视化
matlab复制% 生成测试轨迹
t = linspace(0,2,100);
theta1 = 30*sind(360*0.5*t);
theta2 = 25*sind(360*0.7*t + 30);
theta3 = 35*sind(360*0.6*t + 60);
% 计算末端轨迹
pos = zeros(length(t),3);
for i = 1:length(t)
[x,y,z] = delta_forward(theta1(i),theta2(i),theta3(i));
pos(i,:) = [x,y,z];
end
% 3D轨迹绘制
figure('Color','w')
plot3(pos(:,1), pos(:,2), pos(:,3), 'LineWidth',2)
xlabel('X(mm)'); ylabel('Y(mm)'); zlabel('Z(mm)')
grid on; axis equal
title('Delta机器人末端运动轨迹')
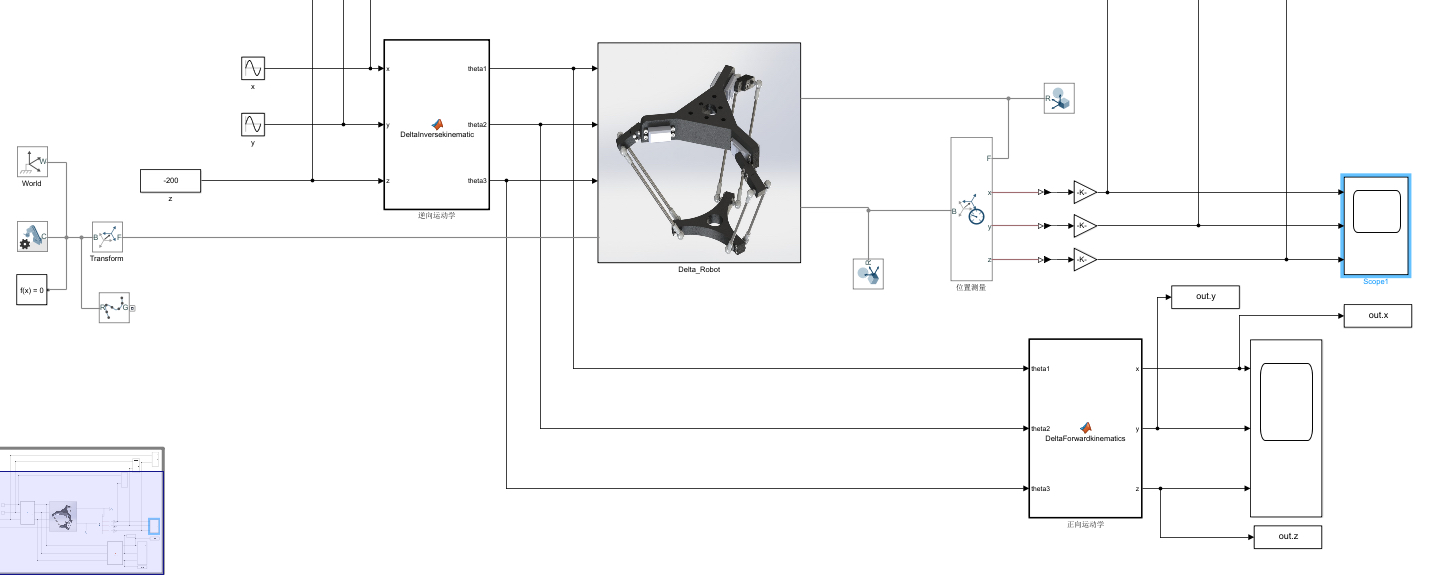
3. Simscape Multibody物理仿真
3.1 模型搭建步骤
-
创建新模型
- 在Simulink库浏览器中找到"Simscape > Multibody"
- 拖入"Mechanism Configuration"模块设置重力
-
构建静平台
- 使用"Rigid Transform"确定电机安装位置
- 添加"Revolute Joint"作为旋转关节
-
装配主动臂
- "Cylinder"几何体表示臂杆
- "Inertia"设置质量属性(实测铝材密度2.7g/cm³)
-
连接从动臂
- 使用"Spherical Joint"实现球铰连接
- "Parallel Constraint"保持平行四边形结构
3.2 关键参数设置
| 参数项 | 推荐值 | 说明 |
|---|---|---|
| 关节阻尼 | 0.01 N·m·s/rad | 模拟实际摩擦 |
| 仿真步长 | 0.001s | 保证数值稳定性 |
| 求解器 | ode15s | 适合刚性系统 |
| 碰撞检测 | 开启 | 防止构件穿透 |
matlab复制% 主动臂驱动信号生成
function theta = joint_driver(t)
theta1 = 30*sin(2*pi*0.5*t);
theta2 = 25*sin(2*pi*0.7*t + pi/6);
theta3 = 35*sin(2*pi*0.6*t + pi/3);
theta = [theta1; theta2; theta3];
end
4. 工程实践中的经验技巧
4.1 参数标定方法
实际装配中几何参数会存在误差,推荐采用激光跟踪仪进行标定:
- 记录至少10组已知关节角度下的末端实际位置
- 建立优化问题:
matlab复制function err = calib_error(params) L = params(1); l = params(2); R = params(3); r = params(4); % 计算理论位置 pos_calc = delta_forward(..., L, l, R, r); err = norm(pos_meas - pos_calc); end - 使用
fmincon进行参数优化
4.2 常见问题排查
-
奇异位形报警
- 现象:仿真时报"Singularity detected"
- 对策:检查从动臂是否完全伸展或折叠
-
末端抖动异常
- 可能原因:求解器步长过大
- 验证方法:将步长从0.01s逐步减小观察
-
轨迹偏离预期
- 检查项:
- 关节旋转方向定义是否一致
- 单位制是否统一(角度制/弧度制)
- 几何参数单位是否为mm
- 检查项:
4.3 性能优化建议
-
代码加速
matlab复制% 将角度转换为弧度预先计算 theta_rad = deg2rad(theta); sin_theta = sin(theta_rad); % 使用向量化运算替代循环 B = A + L.*[cos_theta.*cos_phi, ... cos_theta.*sin_phi, ... sin_theta]; -
实时性提升
- 将正运动学算法生成C代码:
matlab复制
coder -config:dll delta_forward- 实测可缩短计算时间至0.2ms
5. 扩展应用:与视觉系统联动
在典型分拣应用中,Delta机器人需要与视觉系统配合:
matlab复制% 视觉坐标到机器人坐标转换
function robot_pos = vision_to_robot(image_pos)
% 标定矩阵(通过手眼标定获得)
H = [1.02 -0.03 15.3;
0.01 0.99 -8.7;
0 0 1];
% 齐次坐标变换
hom_pos = [image_pos; 1];
robot_pos = H * hom_pos;
robot_pos = robot_pos(1:2);
end
实际部署时建议:
- 视觉采样周期与机器人控制周期同步
- 加入卡尔曼滤波平滑轨迹
- 设置运动学安全边界(如Z轴下限)