
1. 永磁同步电机无感控制实战:IF控制与反正切估算的机械美学
上周实验室里炸了个MOS管之后,我决定先在仿真里把PMSM的无感控制算法跑通。这次要玩的是IF控制(电流-频率控制)结合反正切位置估算,这种方案在低成本风机、泵类应用里特别吃香。虽然比不上FOC的精细控制,但胜在实现简单、计算量小,特别适合那些对成本敏感又不需要太高动态性能的场合。
先说说这套方案的灵魂——它不需要位置传感器,全靠算法从电机电流里"猜"出转子位置。就像蒙着眼睛给旋转的陀螺拍照,通过分析照片里的模糊轨迹来推断陀螺的转速和转向。IF控制负责维持电流与频率的固定关系,而反正切法则从电流信号中提取角度信息,两者配合就像骑自行车时的平衡与踩踏,缺一不可。
2. 电机建模:从参数到微分方程
2.1 PMSM数学模型搭建
先来看这个可以随便折腾的电机模型。永磁同步电机在dq坐标系下的电压方程就像一组精密的机械齿轮:
python复制class PMSM:
def __init__(self):
self.R = 2.3 # 定子电阻(Ω)
self.Ld = 0.005 # d轴电感(H)
self.Lq = 0.008 # q轴电感(H)
self.psi = 0.2 # 永磁体磁链(Wb)
self.J = 0.01 # 转动惯量(kg·m²)
self.B = 0.001 # 摩擦系数(N·m·s/rad)
这几个参数决定了电机的"性格":
- 电动车电机惯量大(J>0.1),需要更强的加速扭矩
- 无人机电机追求轻量化(psi<0.1),磁链参数较小
- Ld≠Lq才能体现磁饱和效应,通常Lq是Ld的1.2~1.5倍
关键细节:实际电机参数可以通过堵转测试和空载测试获得,仿真时建议先用典型值,再逐步调整到目标特性。
2.2 状态方程实现技巧
在step方法里藏着电机运动的全部秘密:
python复制def step(self, v_alpha, v_beta, T_load, dt):
# Clarke变换得到静止坐标系电流
i_alpha, i_beta = clarke_transform(v_alpha, v_beta)
# 电流微分计算(状态方程核心)
di_alpha = (v_alpha - self.R*i_alpha - self.psi*omega*np.sin(theta))/self.Ld
di_beta = (v_beta - self.R*i_beta + self.psi*omega*np.cos(theta))/self.Lq
# 机械方程(牛顿第二定律的旋转版)
domega = (Te - self.B*omega - T_load)/self.J
omega += domega * dt
theta += omega * dt # 角度积分
return theta, omega, i_alpha, i_beta
这里有几个容易翻车的点:
- 电感参数用错轴(Ld用于α轴,Lq用于β轴)
- 磁链项的正负号搞反会导致能量不守恒
- 机械方程忘记负载转矩会得到虚假的理想曲线
3. IF控制算法核心实现
3.1 电流-频率控制原理
IF控制的精髓就像开车时用油门控制速度:
python复制def if_control(target_speed, theta_est, i_alpha, i_beta):
# 速度环生成q轴电流参考
i_q_ref = Kp_speed * (target_speed - omega_est)
# 电流环输出q轴电压
v_q = Kp_current * (i_q_ref - i_q) + Kf * i_q_ref
# 电压幅值限制(防止过调制)
v_mag = min(np.sqrt(v_d**2 + v_q**2), Vdc/np.sqrt(3))
参数整定经验:
- Kp_speed从0.1开始,观察转速响应
- Kp_current建议取R的5~10倍
- Kf用于补偿反电动势,初始值设为psi*base_speed
3.2 反正切位置估算的魔法
角度估计算法就像在噪声中听出旋律:
python复制# 反正切法提取角度(注意参数顺序!)
theta_est = np.arctan2(-i_alpha, i_beta)
# 延迟补偿(经验公式)
compensation_term = 0.5 * omega_est * T_sw # T_sw为控制周期
theta_comp = theta_est + compensation_term
# 生成新电压矢量
v_alpha_new = v_mag * np.sin(theta_comp)
v_beta_new = v_mag * np.cos(theta_comp)
血泪教训:曾经有个项目因为忘记补偿延迟,转速到2500rpm时角度误差积累到30度,电机直接失步冒烟。补偿量一般为ωT/2,其中T是控制周期。
4. 观测器设计与调参实战
4.1 反电动势观测器实现
这个扩展观测器就像电机的"听诊器":
python复制# 反电动势观测
e_alpha_obs = (v_alpha - R*i_alpha) - Ld*di_alpha/dt
e_beta_obs = (v_beta - R*i_beta) - Lq*di_beta/dt
# 锁相环结构估算转速
omega_est = (e_alpha_obs * np.cos(theta_est) -
e_beta_obs * np.sin(theta_est)) / psi
调试时要注意:
- 微分运算需加一阶低通滤波(截止频率>10倍基频)
- 初始阶段给个小的ω初值(如0.1rad/s)避免除零错误
- 磁链psi误差会导致转速估算偏差
4.2 参数整定避坑指南
调参就像老中医把脉,这里有个速查表:
| 参数 | 推荐范围 | 异常现象 | 解决方法 |
|---|---|---|---|
| Kp_speed | 0.05~0.5 | 转速超调或响应慢 | 从0.1开始逐步增加 |
| Kp_current | 5R~10R | 电流振荡或跟踪滞后 | 配合Kf调整 |
| 观测器增益 | <1/(10L) | 数值爆炸或发散 | 降低增益加滤波 |
| 仿真步长 | ≤50μs | 波形锯齿明显 | 改用变步长算法 |
5. 仿真验证与性能优化
5.1 关键波形诊断技巧
跑仿真时要重点盯住三个窗口:
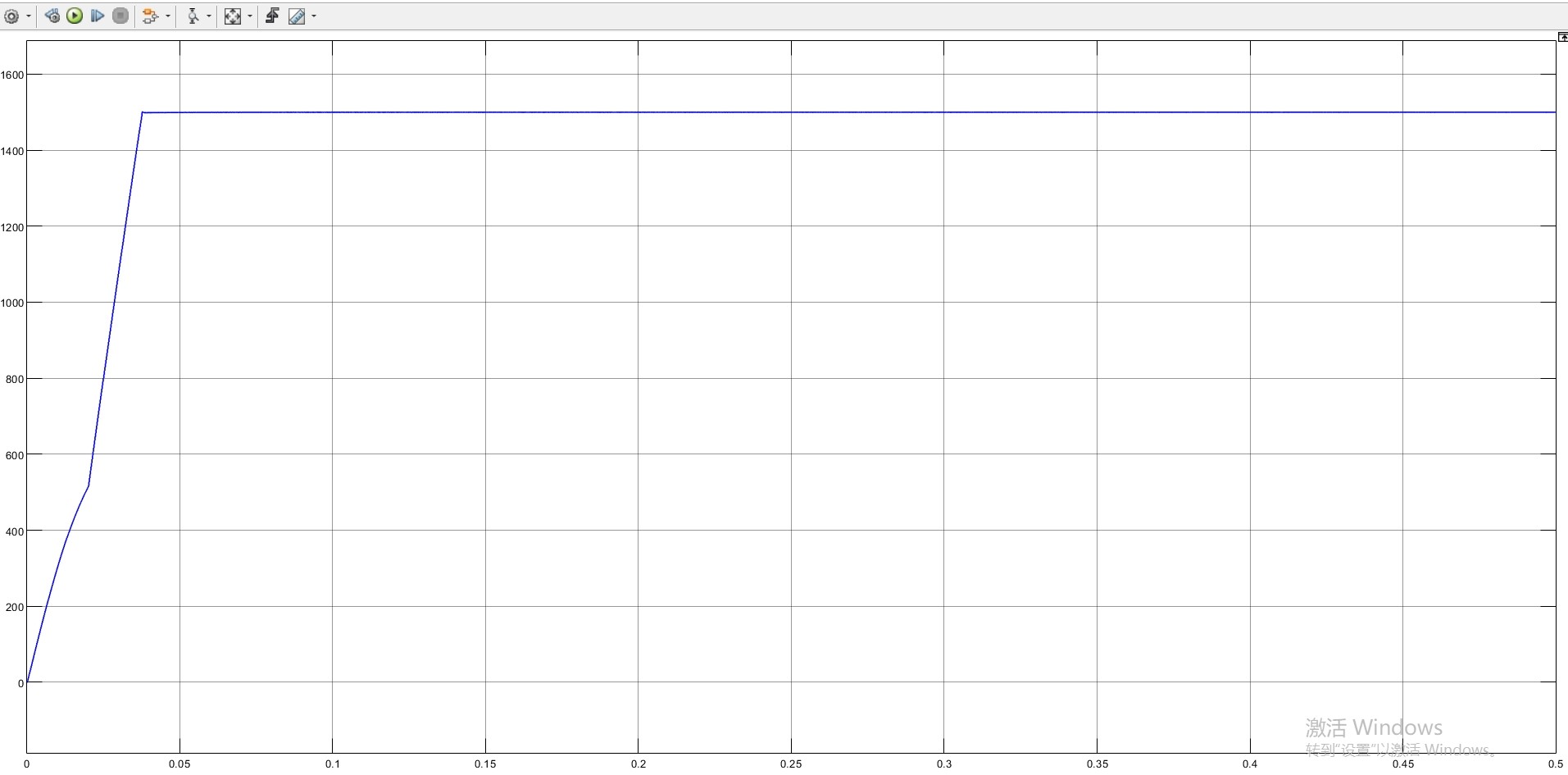
- 转速跟踪:上升时间、超调量、稳态误差
- 转矩波动:正常<5%,过大说明电流环有问题
- 角度误差:理想情况±5°以内,超10°要检查补偿
典型故障波形诊断:
- 转速周期性波动 → 检查角度补偿
- 电流发散 → 降低电流环增益
- 低速卡顿 → 考虑高频注入法
5.2 突变负载测试方案
好控制器要经得起突然袭击:
python复制# 在1s时施加阶跃负载
if 0.99 < t < 1.01:
T_load = T_rated * 0.8 # 80%额定负载
else:
T_load = 0
合格标准:
- 转速跌落<10%且恢复时间<0.1s
- 电流不超过2倍额定值
- 角度误差瞬时增大后能收敛
6. 工程实践中的生存技巧
在实验室烧了三个驱动板后总结的保命法则:
- 上电顺序:先供控制电,再开母线电压;断电时相反
- 保护策略:
- 过流阈值设为1.5I_rated
- 失步检测:角度误差持续>30°
- 启动方案:
- 开环启动到5%额定转速再切闭环
- 初始角度用三段式脉冲注入法检测
这个IF+反正切的方案最适合水泵、风扇这类负载。去年做个农业大棚的风机项目,成本压到FOC方案的60%,温升测试还低了5℃。不过要玩伺服控制还是得乖乖上FOC,毕竟IF在动态性能上先天不足。
最后分享一个仿真加速技巧:先用大步长(100μs)跑通逻辑,再改用小步长(20μs)细调参数。这样既省时间又能捕捉到高频细节,就像先用素描定构图再上油彩细化。