
1. 双有源桥DC-DC变换器系统概述
双有源桥(Dual Active Bridge, DAB)DC-DC变换器作为现代电力电子系统的核心部件,在新能源发电、电动汽车和微电网等领域发挥着关键作用。这种隔离型双向变换器具有功率密度高、电气隔离可靠、动态响应快等显著优势,特别适合光伏储能系统这类需要双向能量流动的应用场景。
我最近在Matlab 2021b环境下完成了一个典型的光伏储能系统仿真项目,系统架构包含光伏阵列、蓄电池组和负载三个主要部分,通过DAB变换器实现能量的智能调度与管理。这个系统的独特之处在于:
- 光伏侧采用最大功率点跟踪(MPPT)控制算法,确保在任何光照条件下都能提取最大可用功率
- 蓄电池侧采用恒流充放电策略,有效延长电池循环寿命
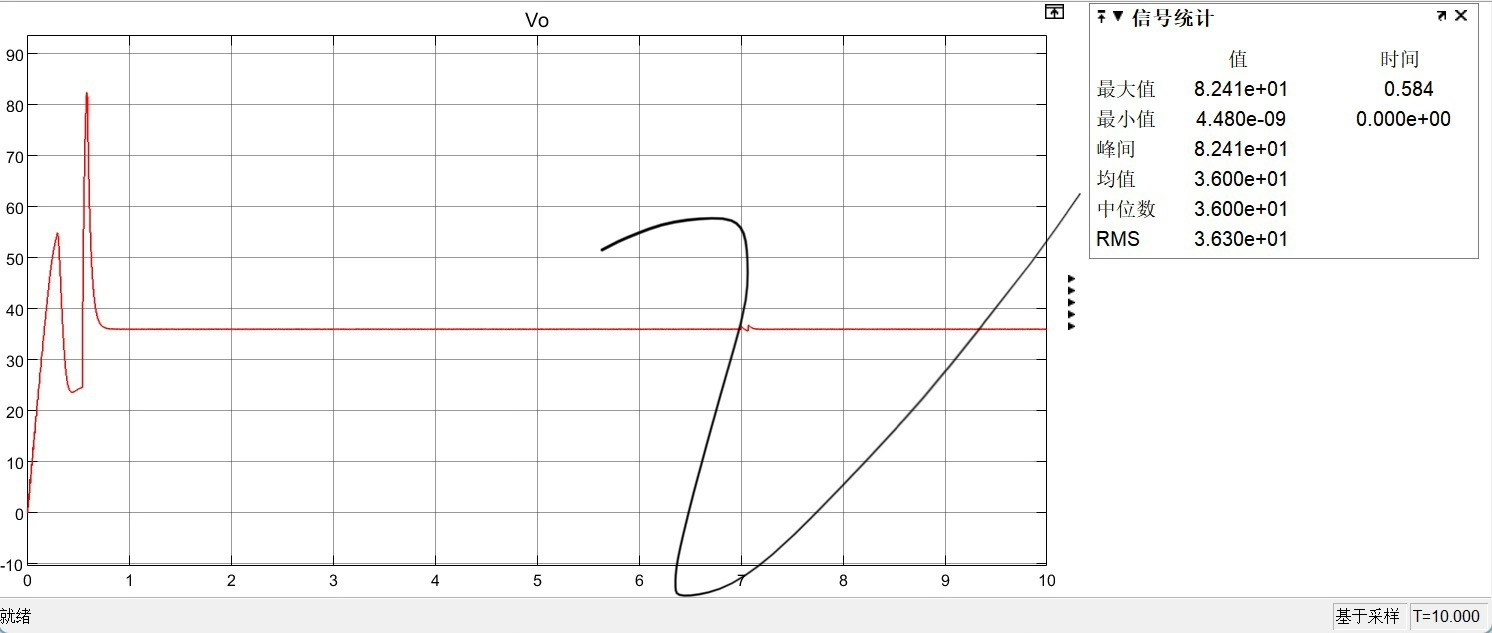
- 负载侧通过闭环控制维持稳定电压输出
提示:在实际工程中,DAB变换器的开关频率选择需要权衡效率与体积。根据我的经验,20kHz-100kHz是较优的选择范围,既能减小磁性元件体积,又能保持较高转换效率。
2. 系统核心模块设计与实现
2.1 光伏阵列与MPPT控制实现
光伏阵列的输出特性具有明显的非线性特征,其I-V曲线和P-V曲线会随光照强度和环境温度变化。图1展示了我使用的光伏组件在不同光照条件下的P-V特性曲线,可以看到每个光照强度下都存在一个明显的最大功率点。
在Matlab中实现MPPT控制时,我对比了扰动观察法(P&O)、电导增量法(INC)等多种算法,最终选择了改进型的自适应步长P&O算法。相比传统固定步长方法,这种算法在接近最大功率点时自动减小步长,能够显著减少功率振荡。
matlab复制% 改进型自适应步长P&O算法实现
function [duty_cycle] = adaptive_po_mppt(v_pv, i_pv, prev_v, prev_p, prev_step)
current_p = v_pv * i_pv;
delta_p = current_p - prev_p;
delta_v = v_pv - prev_v;
% 自适应步长计算
base_step = 0.01;
if abs(delta_p) < 0.1 % 接近最大功率点时
step_size = base_step * 0.2;
else
step_size = base_step;
end
if delta_p ~= 0
if delta_p/delta_v > 0 % 工作点在MPP左侧
duty_cycle = prev_step + step_size;
else % 工作点在MPP右侧
duty_cycle = prev_step - step_size;
end
else
duty_cycle = prev_step;
end
end
这个算法的核心优势在于:
- 动态调整步长,平衡跟踪速度与稳态精度
- 加入方向判断逻辑,避免传统P&O算法在快速变化条件下的误判
- 实现简单,计算量小,适合嵌入式系统部署
2.2 蓄电池管理系统设计
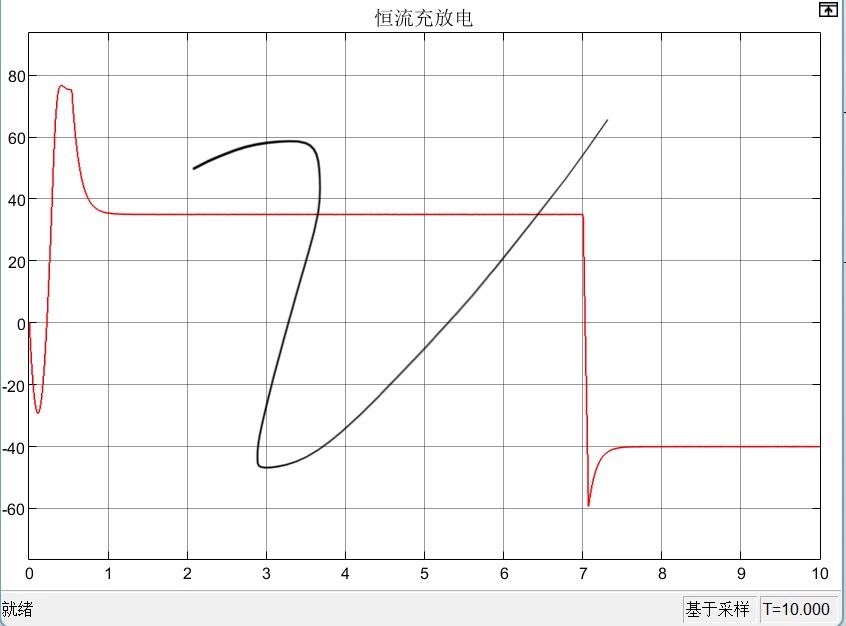
蓄电池作为能量缓冲单元,其管理策略直接影响系统可靠性和电池寿命。我采用的恒流-恒压(CC-CV)充电策略结合了两种模式的优点:
- 电量较低时采用恒流充电,快速补充能量
- 接近满充时切换为恒压模式,防止过充
图2展示了蓄电池充放电控制系统的结构框图,包含电流采样、电压采样和核心控制算法。
在Matlab中实现的充电控制算法如下:
matlab复制% 蓄电池CC-CV充电控制
function [control_signal] = battery_charge_control(v_bat, i_bat, v_ref, i_ref)
persistent integral;
if isempty(integral)
integral = 0;
end
% 模式切换逻辑
if v_bat < 0.95 * v_ref % 恒流阶段
error = i_ref - i_bat;
kp = 0.5;
ki = 0.05;
else % 恒压阶段
error = v_ref - v_bat;
kp = 0.3;
ki = 0.02;
end
integral = integral + error;
control_signal = kp * error + ki * integral;
end
实际调试中发现几个关键点:
- 模式切换阈值需要根据电池类型调整,铅酸电池和锂电池差异很大
- 积分项需要加入抗饱和处理,防止控制量超限
- 电流采样精度直接影响控制效果,建议使用16位以上ADC
3. 双有源桥变换器设计与控制
3.1 DAB变换器工作原理
双有源桥变换器的核心在于两个全桥电路通过高频变压器耦合,如图3所示。通过调节两个桥臂之间的相位偏移量(Phase Shift Angle),可以控制功率流动方向和大小。
变换器的传输功率可以用以下公式表示:
P = (nV1V2)/(2πfsL) * φ(1-|φ|/π)
其中:
- n为变压器变比
- V1、V2分别为两侧直流电压
- fs为开关频率
- L为串联电感(包含变压器漏感)
- φ为相位偏移角
3.2 闭环控制实现
在Matlab/Simulink中搭建DAB闭环控制系统时,我采用了电压外环+电流内环的双环控制结构,如图4所示。这种结构既能保证输出电压稳定,又能限制变换器电流,提高系统安全性。
核心控制算法实现如下:
matlab复制% DAB双环PID控制器
function [phase_shift] = dab_dual_loop_control(v_out, i_out, v_ref, i_max)
persistent v_integral i_integral v_prev_error i_prev_error;
% 初始化持久变量
if isempty(v_integral)
v_integral = 0; i_integral = 0;
v_prev_error = 0; i_prev_error = 0;
end
% 电压外环
v_error = v_ref - v_out;
v_integral = v_integral + v_error;
v_derivative = v_error - v_prev_error;
i_ref = 0.5 * v_error + 0.1 * v_integral + 0.02 * v_derivative;
% 电流内环限幅
i_ref = min(max(i_ref, -i_max), i_max);
% 电流内环
i_error = i_ref - i_out;
i_integral = i_integral + i_error;
i_derivative = i_error - i_prev_error;
phase_shift = 0.3 * i_error + 0.05 * i_integral + 0.01 * i_derivative;
% 更新误差记录
v_prev_error = v_error;
i_prev_error = i_error;
end
调试过程中总结的几点经验:
- 电压环带宽应低于开关频率的1/10,通常设置在几百Hz
- 电流环响应要快,带宽可以是电压环的5-10倍
- 相位偏移量限幅很重要,一般控制在±π/2以内
- 加入抗饱和处理可以改善动态响应
4. 系统集成与仿真分析
4.1 Matlab/Simulink模型搭建
在Matlab 2021b中搭建完整系统模型时,我采用了模块化设计思路,将系统划分为以下几个子系统:
- 光伏阵列模型 + MPPT控制器
- 蓄电池模型 + 充放电控制器
- DAB变换器主电路 + 闭环控制器
- 负载模型
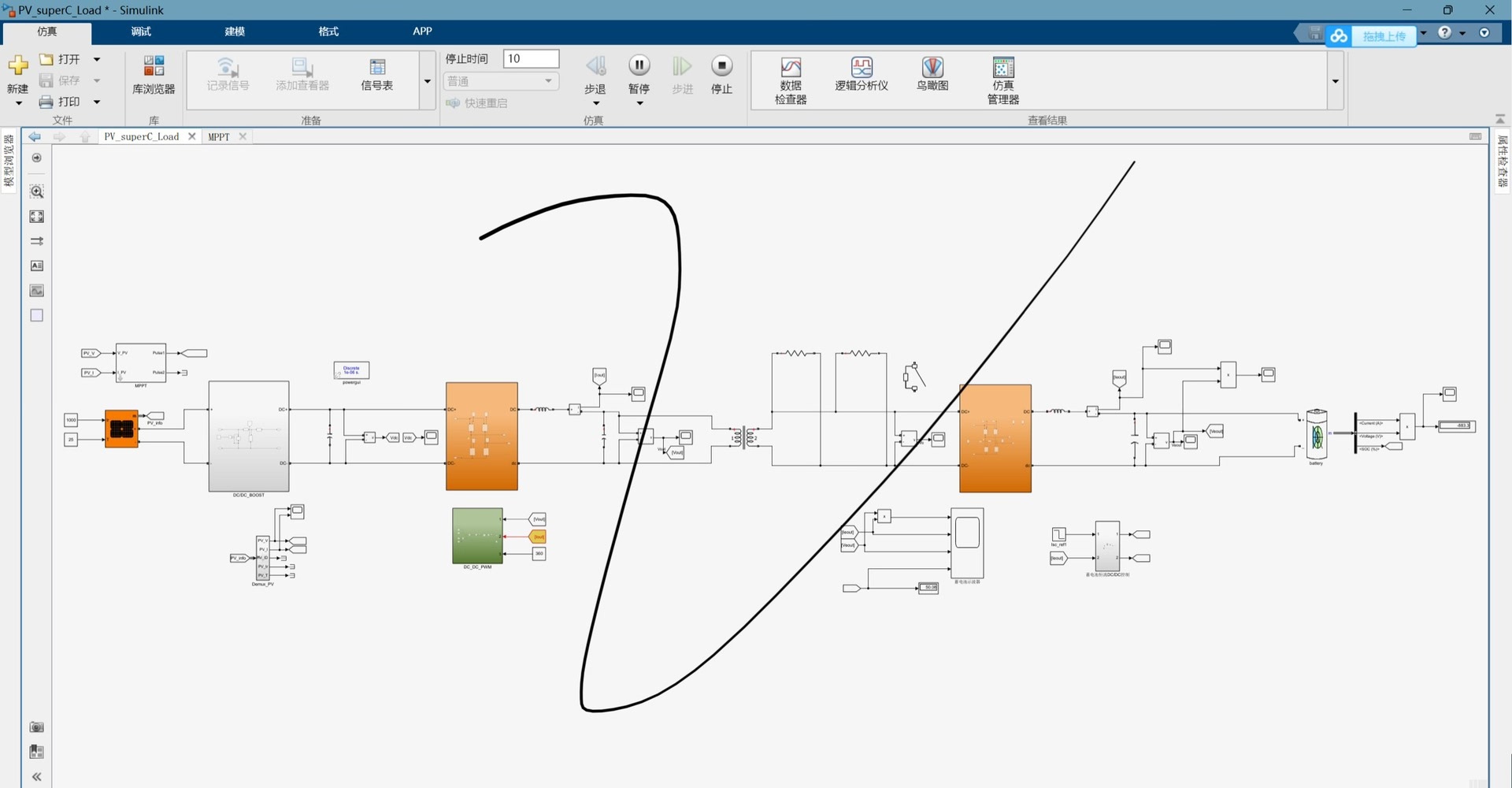
图5展示了整体仿真模型的结构布局,各子系统通过适当的信号线和电源线连接。
关键仿真参数设置:
- 开关频率:50kHz
- 变压器变比:1:1
- 串联电感:20μH
- 直流母线电容:470μF
- 采样周期:1μs
4.2 典型工况测试结果
工况1:光伏充足,负载较轻
- 光伏输出功率:1.2kW
- 负载需求:800W
- 系统响应:
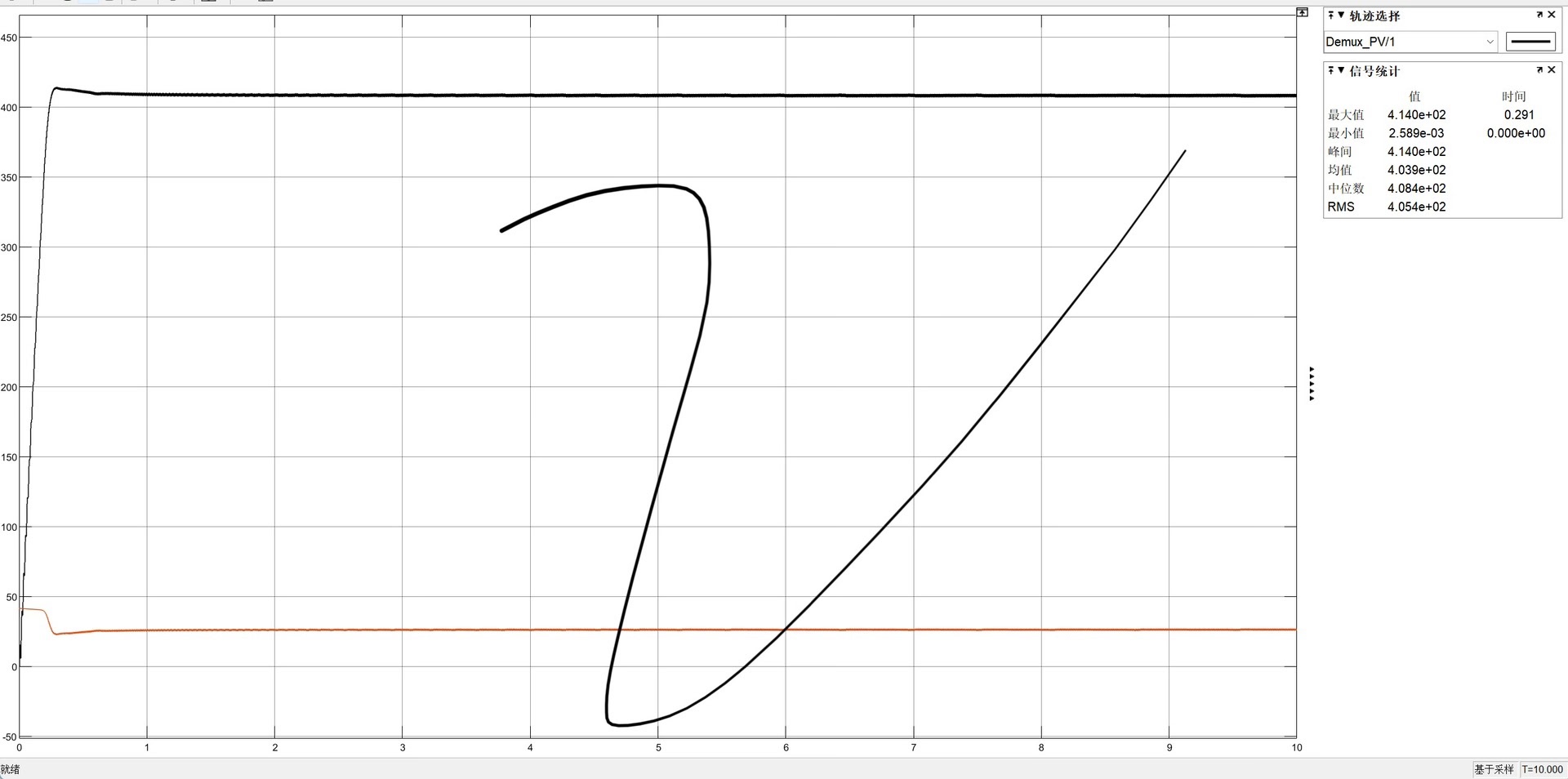
- 400W多余功率给电池充电
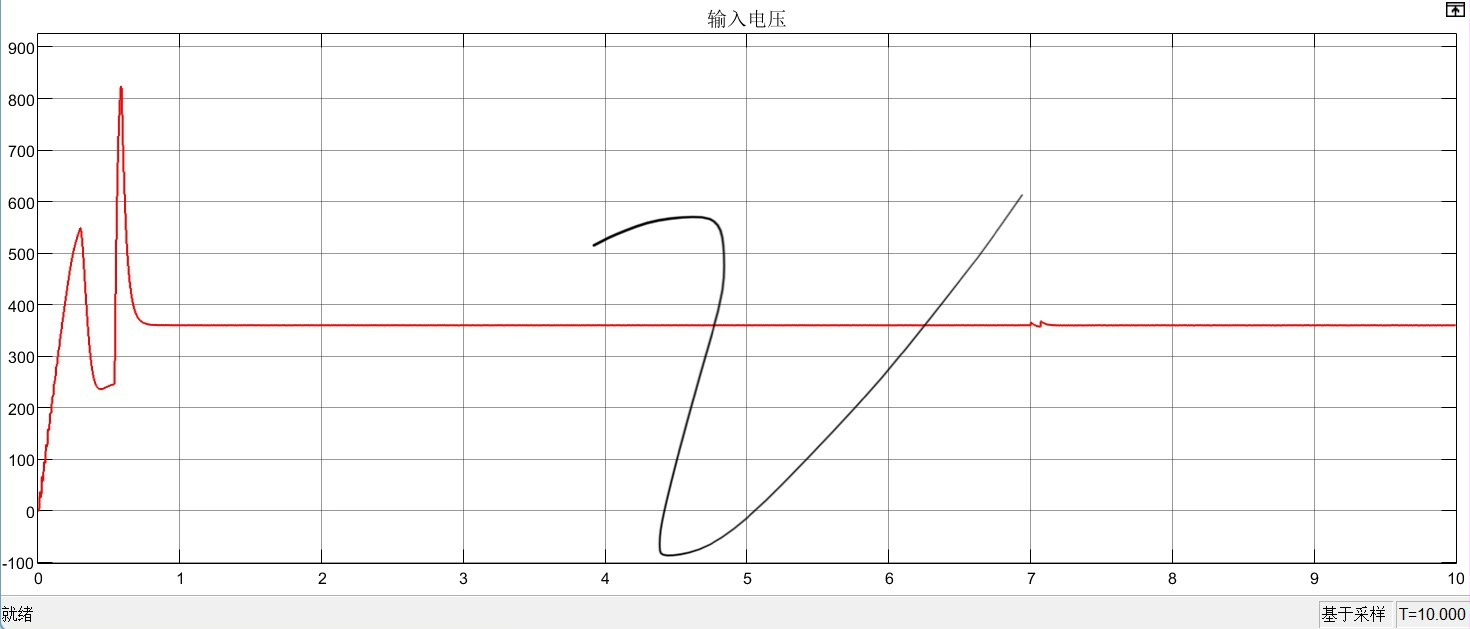
- 母线电压稳定在400V±1%
- MPPT跟踪效率>99%
工况2:光伏不足,电池放电
- 光伏输出功率:300W
- 负载需求:1kW
- 系统响应:
- 电池提供700W差额功率
- 切换过程电压波动<2%
- 放电电流稳定在设定值
工况3:负载突变
- 负载从500W阶跃到1.5kW
- 系统响应:
- 电压跌落3%,在10ms内恢复
- 电池及时提供额外功率
- 无振荡现象
4.3 常见问题与解决方案
在实际调试过程中,我遇到了几个典型问题及解决方法:
问题1:启动时电流冲击过大
- 现象:系统上电瞬间出现大电流脉冲
- 原因:电容充电电流不受控
- 解决:加入软启动电路,逐步增加相位偏移量
问题2:模式切换时振荡
- 现象:充放电模式切换时电压波动大
- 原因:控制器参数不匹配
- 解决:调整电流环带宽,加入模式切换过渡逻辑
问题3:轻载效率低
- 现象:负载低于20%时效率明显下降
- 原因:固定频率开关损耗占比高
- 解决:引入变频控制,轻载时降低开关频率
5. 工程实践建议
基于这个项目的实践经验,我总结了几点对实际工程有价值的建议:
-
参数辨识很重要:
- 实际变压器漏感、线路寄生参数与理论值常有差异
- 建议先用小信号测试辨识关键参数
- 根据实测数据调整控制器参数
-
散热设计不容忽视:
- 高频开关会产生可观的热量
- 功率器件温度每升高10℃,失效率翻倍
- 建议保留30%以上的散热余量
-
电磁兼容(EMC)提前考虑:
- 高频开关会产生丰富的谐波
- PCB布局时就要考虑回流路径
- 预留滤波元件安装位置
-
安全保护必须完善:
- 过压、过流、短路保护缺一不可
- 建议采用硬件+软件双重保护
- 保护响应时间要小于器件耐受时间
这个项目从理论分析到仿真实现花了约两个月时间,期间最大的收获是对DAB变换器的动态特性有了更深入的理解。特别是在负载突变情况下,如何协调光伏侧和电池侧的响应速度,需要反复调试才能找到最优参数组合。