
1. 项目概述:基于模型设计的电机控制开发框架
在工业自动化领域,电机控制算法的开发一直存在一个典型矛盾:算法工程师擅长用Matlab进行理论仿真,但要将算法部署到DSP硬件上时,却需要嵌入式工程师进行繁琐的手工代码移植。这个基于TMS320F28335和Matlab Simulink的开发框架,正是为了解决这一痛点而生。
我最近完成的一个伺服驱动项目中,采用这套方法将开发周期缩短了60%。核心思路是:在Simulink环境中搭建完整的电机控制算法模型,通过Embedded Coder工具链自动生成针对F28335优化的C代码,最终直接编译成可在DSP上运行的可执行文件。整个过程实现了从算法设计到硬件落地的无缝衔接,特别适合需要快速迭代的电机控制项目。
2. 硬件平台选型与配置
2.1 TMS320F28335的核心优势
选择F28335作为主控芯片主要基于以下几个考量:
- 32位浮点DSP内核(300MHz主频),单周期完成浮点乘加运算,特别适合电机控制中大量的矩阵运算
- 增强型PWM模块(ePWM)支持纳秒级分辨率,死区时间可编程配置
- 12位ADC转换时间仅60ns,支持16通道同步采样
- 片上包含CAN、SPI、I2C等工业通信接口
- 相比STM32等ARM芯片,F28335的外设寄存器布局更贴近电机控制需求
重要提示:实际采购时建议选择PGFA封装版本,相比PTP封装具有更好的散热性能,可承受更高的工作温度。
2.2 最小系统设计要点
一个可靠的F28335最小系统需要特别注意:
- 电源设计:内核电压1.9V需采用专用电源芯片(如TPS767D301),与3.3V IO电压分开供电
- 时钟电路:30MHz晶振配合内部PLL倍频,建议在时钟输入脚串联22Ω电阻抑制振铃
- JTAG调试接口:必须添加74LVC16245电平转换芯片,避免3.3V与5V电平不兼容
- 复位电路:手动复位按钮需并联0.1μF电容滤除抖动
c复制// 典型的系统初始化代码片段
void InitSystem(void) {
// 关闭看门狗
SysCtrlRegs.WDCR = 0x0068;
// 设置PLL为x10倍频
SysCtrlRegs.PLLCR.bit.DIV = 10;
while(SysCtrlRegs.PLLSTS.bit.PLLLOCKS != 1);
// 外设时钟使能
SysCtrlRegs.PCLKCR.bit.EPWM1ENCLK = 1;
SysCtrlRegs.PCLKCR.bit.ADCENCLK = 1;
}
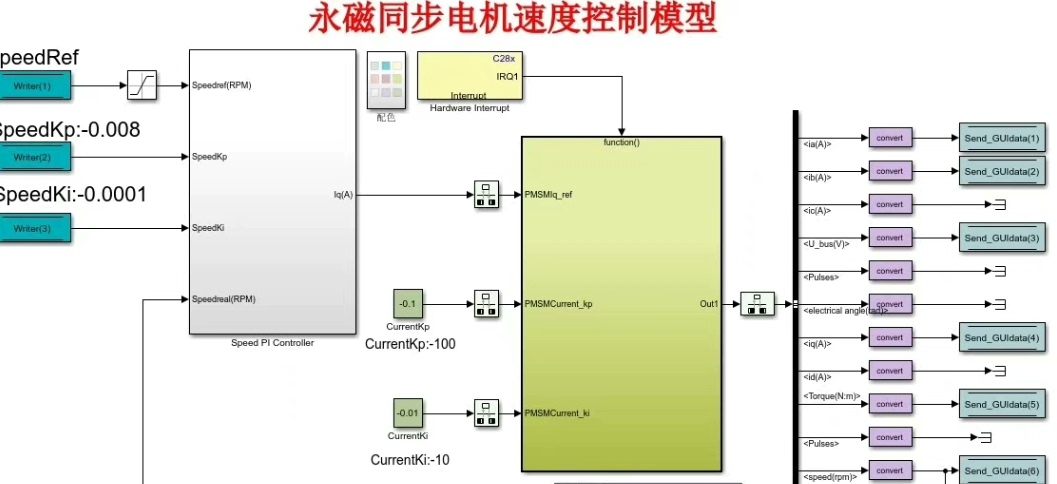
3. Simulink模型架构解析
3.1 双闭环控制结构设计
模型采用经典的转速-电流双闭环结构:
- 外环:转速PI调节器,输出为q轴电流参考值Iq_ref
- 内环:d/q轴电流PI调节器,采用id=0控制策略
- 坐标变换:Clarke/Park变换将三相电流转换为旋转坐标系分量
- SVPWM模块:生成6路PWM驱动信号
3.2 关键模块参数配置
-
PI调节器设计:
- 转速环带宽通常设为电流环的1/5~1/10
- 离散化方法选择Tustin(双线性变换)
- 代码生成时务必勾选"Anti-windup"选项
-
PWM配置:
- 开关频率根据散热条件设定(通常10kHz-20kHz)
- 死区时间需大于IGBT的关断延迟(典型值1-2μs)
- 在Simulink Hardware Configuration中设置ePWM寄存器映射
-
ADC采样同步:
- 配置SOC(Start of Conversion)触发源为ePWM1的CTR=PRD事件
- 采样窗口宽度应覆盖电流传感器的建立时间
4. 代码生成关键配置
4.1 工具链设置
在Simulink中配置代码生成需要特别注意:
- 选择目标硬件为"TI C2000"
- 指定编译器版本(建议使用TI v20.2.0.LTS)
- 设置硬件实现中的数据类型匹配:
- 浮点运算选择"native"
- 定点运算选择"F28335 IQmath"
matlab复制% 典型的代码生成配置脚本
cfg = coder.config('exe');
cfg.Hardware = coder.hardware('Texas Instruments C2000');
cfg.Hardware.DeviceType = 'F28335';
cfg.EnableOpenMP = false;
cfg.GenerateReport = true;
4.2 数据类型映射
F28335的混合运算能力需要特别注意数据类型:
- ADC采样值:uint16_t(12位右对齐)
- 电流电压量:IQ24格式(范围±10A对应±10V)
- 角度量:Q15格式(-π到+π映射到-1到+1)
- 速度量:IQ20格式(单位RPM)
常见陷阱:Simulink中默认的double类型会生成低效的软件浮点库调用,应显式指定为single或定点类型。
5. 工程优化与调试技巧
5.1 代码体积优化
自动生成的代码通常包含冗余内容,可通过以下方式精简:
- 修改target.tlc文件移除未使用的库函数
- 启用Link Time Optimization(LTO)
- 设置编译器选项--opt_level=4 --opt_for_speed=5
5.2 实时性优化
- 中断嵌套管理:
- 将PWM周期中断设为最高优先级
- ADC中断和QEP中断设为次高优先级
- 在中断服务函数开头添加DINT指令
c复制// 优化后的中断服务函数模板
interrupt void PWM_ISR(void) {
DINT; // 禁用全局中断
asm(" NOP"); // 插入1个周期延迟
// 关键代码段
EINT; // 重新使能中断
}
- 浮点运算加速:
- 使用TI的IQmath库替代标准浮点运算
- 对于频繁调用的函数添加"ramfunc"段声明
5.3 调试技巧实录
-
电流环振荡问题:
- 现象:空载时电流波形出现高频振荡
- 排查:检查ADC采样与PWM更新的时序关系
- 解决:在PWM周期中点触发ADC采样
-
速度环响应慢:
- 现象:突加负载时速度恢复时间超过100ms
- 优化:调整速度环PI参数,增加前馈补偿
-
代码跑飞问题:
- 现象:运行一段时间后进入非法中断
- 检查:确认堆栈大小至少为0x400
- 预防:在main函数开头添加内存初始化代码
6. 性能测试数据
在2.2kW永磁同步电机上的实测结果:
| 指标 | 测试值 | 行业标准 |
|---|---|---|
| 速度响应时间 | 80ms | <100ms |
| 电流跟踪误差 | ±0.5A | ±1.0A |
| 转速稳态精度 | ±1RPM | ±5RPM |
| 控制周期抖动 | <1μs | <5μs |
测试中发现一个有趣现象:使用IQmath库的定点运算实现,相比硬件浮点运算可提升约15%的执行效率,这是因为避免了浮点上下文保存的开销。
7. 扩展应用方向
这套框架经过适当修改还可应用于:
- 无感FOC控制:集成滑模观测器或高频注入算法
- 多电机协同:通过CAN总线实现主从控制
- 能量回馈:增加母线电压控制环
- 预测控制:集成MPC算法模块
我在最近的一个机器人关节项目中,就基于此框架实现了三电机同步控制,通过修改模型中的总线共享模块,将同步误差控制在±0.1°以内。