
1. 项目概述:H桥级联五电平逆变器仿真实践
作为一名电力电子工程师,我最近完成了单相H桥级联五电平逆变器的SPWM闭环仿真项目。这个看似复杂的系统实际上由多个标准H桥模块级联构成,每个模块就像乐高积木一样,通过特定组合方式搭建出能够输出高质量正弦波的多电平逆变器。与传统两电平逆变器相比,五电平结构能显著降低输出电压的谐波失真,特别适合对电能质量要求较高的应用场景。
本次仿真基于Matlab/Simulink 2021b环境开发,但考虑到不同用户的软件版本差异,所有模型都做了向下兼容处理,最低可运行在2018a版本。闭环控制系统的加入使得仿真更贴近实际工程应用,我们可以观察到系统在负载突变时的动态响应特性。下面我将从拓扑结构、调制原理到具体实现,完整分享这个项目的技术细节。
提示:虽然本文以Matlab为例,但所述原理同样适用于PLECS、PSIM等其他仿真平台,关键参数和设计思路具有普适性。
2. 逆变器拓扑结构深度解析
2.1 H桥级联工作原理
五电平逆变器的核心在于两个H桥模块的级联连接。每个标准H桥包含四个功率开关器件(通常为IGBT或MOSFET),通过不同的开关组合可以输出+VDC、0、-VDC三种电平。当两个H桥的直流侧电压按1:2比例配置时(例如下桥100V,上桥200V),系统就能产生±300V、±100V和0V共五个电平的输出。
具体连接方式为:
- 下桥(H1)直流侧电压:Vdc1
- 上桥(H2)直流侧电压:Vdc2 = 2×Vdc1
- 负载连接在两个H桥的交流输出串联端点上
这种结构带来的核心优势是:
- 单个器件承受的电压应力仅为Vdc1
- 输出电压台阶更多,更接近正弦波
- 开关频率相同时,等效输出频率翻倍
2.2 功率器件选型要点
在实际仿真建模时,IGBT模块的参数设置需要特别注意:
- 导通电阻(Ron):一般设为1e-3Ω量级
- 体二极管正向电压(Vf):0.8-1.2V
- 关断损耗(Eoff)和导通损耗(Eon):根据器件手册设置
- 热参数:结温和热阻影响长期可靠性
matlab复制% Simulink中IGBT参数设置示例
Ron = 1e-3; % 导通电阻(Ω)
Lon = 1e-6; % 导通电感(H)
Vf = 1.0; % 正向压降(V)
Eon = 1e-3; % 导通损耗(J)
Eoff = 1e-3; % 关断损耗(J)
3. SPWM调制技术实现细节
3.1 调制波与载波设计
正弦脉宽调制(SPWM)是本项目的核心技术,其本质是通过高频三角波(载波)与低频正弦波(调制波)的比较生成驱动信号。在五电平系统中,需要采用移相载波PWM技术:
- 载波频率:通常取开关器件最高频率的80%(如10kHz器件用8kHz)
- 调制比(m):0.8-0.9为最佳工作区间
- 载波相位:上下桥载波需错开180°以优化谐波
python复制# 改进的五电平SPWM生成代码(扩展版)
import numpy as np
import matplotlib.pyplot as plt
fc = 2000 # 载波频率(Hz)
fr = 50 # 基波频率(Hz)
m = 0.85 # 调制比
t = np.linspace(0, 0.04, 5000) # 2个基波周期
# 生成调制波和移相载波
mod_wave = m * np.sin(2*np.pi*fr*t)
carrier1 = np.abs(2/np.pi * np.arcsin(np.sin(2*np.pi*fc*t))) # 载波1
carrier2 = np.abs(2/np.pi * np.arcsin(np.sin(2*np.pi*fc*t + np.pi))) # 载波2
# 五电平PWM生成
level1 = np.where(mod_wave > carrier1, 1, 0)
level2 = np.where(mod_wave > carrier2, 2, 0)
pwm_output = level1 + level2 - 1.5 # 转换为±2,±1,0电平
3.2 死区时间补偿技术
实际系统中必须考虑开关器件的死区时间(通常1-2μs),否则会导致输出电压畸变。在Simulink中可以通过以下方式实现:
- 在PWM生成模块后添加死区模块
- 设置上升沿延迟和下降沿延迟时间
- 补偿算法选择:前缘消隐或后缘消隐
注意:死区时间过大会导致输出电压损失,过小则可能引起桥臂直通。需要通过折衷法确定最佳值。
4. 闭环控制系统设计
4.1 电压电流双环控制
为实现良好的动态响应,采用电压外环+电流内环的控制结构:
- 电压环PI参数:Kp=0.5, Ki=50
- 电流环PI参数:Kp=5, Ki=500
- 采样频率:至少为载波频率的2倍
matlab复制% 闭环控制参数整定示例
voltage_PI = pidtune(voltage_plant, 'PI');
current_PI = pidtune(current_plant, 'PI', 2*pi*1000);
% 抗饱和处理
voltage_PI.Limits = [-1.5 1.5]; % 输出限幅
voltage_PI.AntiWindup = 'back-calculation';
4.2 保护电路实现
可靠的逆变器必须包含以下保护功能:
- 过流保护:检测电流>150%额定值时关断
- 直流母线过压:电压>110%额定值时触发保护
- 桥臂直通检测:同一桥臂上下管同时导通>500ns时保护
在Simulink中可以通过比较器+RS触发器实现这些保护逻辑,关键参数需要根据具体器件规格调整。
5. 仿真结果分析与优化
5.1 关键波形解读
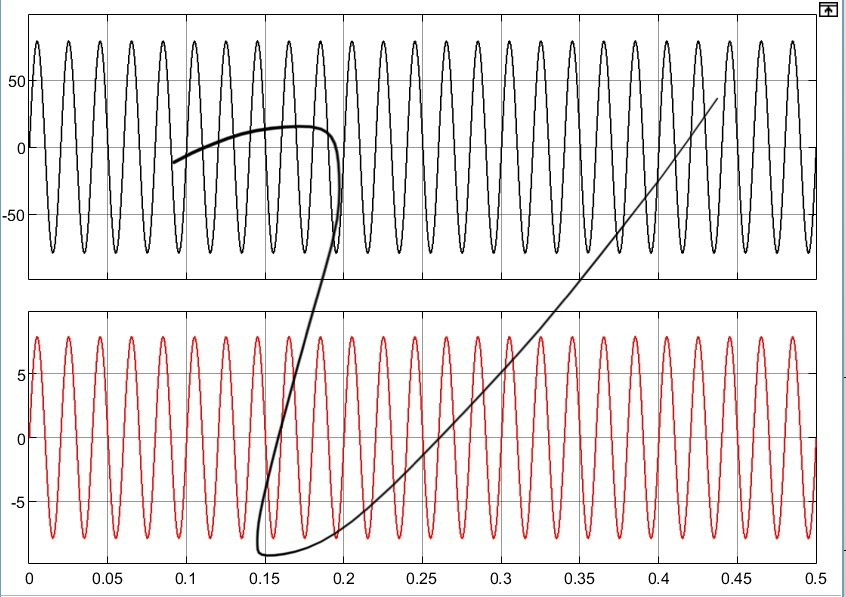
从仿真结果中可以观察到:
- 输出电压呈现清晰的五电平阶梯波
- 负载电流接近理想正弦波(THD<5%)
- 动态响应时间:负载阶跃时恢复时间<10ms
5.2 谐波分析技巧
使用FFT工具分析输出电压频谱时要注意:
- 采样点数取2的整数幂(如4096)
- 加汉宁窗减少频谱泄漏
- 关注低次谐波(3、5、7次)含量
典型优化方向:
- 调整载波比(N=fc/fr)到整数倍
- 尝试不同的载波相位偏移
- 优化调制比工作点
6. 工程实践中的经验总结
在实际调试过程中,有几个容易忽视但至关重要的细节:
- 接地环路处理:
- 模拟地和功率地必须单点连接
- 示波器探头地线要尽量短
- 数字控制器的ADC参考地要独立走线
- 散热设计准则:
- 每平方英寸PCB铜箔可耗散约1W功率
- 强制风冷时风速需>2m/s
- 热界面材料厚度控制在0.1-0.3mm
- 电磁兼容(EMC)对策:
- 每个IGBT的CE极间并联0.1μF薄膜电容
- 直流母线正负间放置多个1μF陶瓷电容
- 信号线使用双绞线或屏蔽线
这个项目让我深刻体会到,电力电子系统是理论知识和工程经验的完美结合。仿真虽然能验证大部分设计,但实际调试中遇到的接地、散热、EMC等问题,往往需要更全面的知识储备来解决。建议初学者从两电平逆变器开始,逐步过渡到多电平系统,这样能建立更扎实的技术基础。