
1. 高速差分信号等长匹配的核心原理
在高速数字电路设计中,差分信号因其优异的抗干扰能力被广泛应用。但很多人可能不知道,差分信号的性能优势很大程度上依赖于一个关键设计要素:等长匹配。让我们从电磁场基本原理出发,深入理解为什么几mil的长度差异就会显著影响系统性能。
1.1 差分信号传输的本质特征
差分信号由一对幅度相等、相位相反的信号组成,在理想情况下具有以下特性:
- 信号能量主要集中在两条走线之间的空间
- 外部干扰对两条线的影响是同相的(共模干扰)
- 接收端通过差值检测信号,理论上可以完全抑制共模干扰
但实际情况中,差分对的两条走线很难做到完全对称。以DDR3的DQS信号为例,当两条走线长度出现差异时,会导致:
- 信号传输时延不同(ΔT=ΔL/v,v为信号传输速度)
- 信号边沿到达时间错位
- 共模电流分量增加
1.2 时延差异的电磁学影响
假设信号传输速度为6in/ns(典型FR4板材情况),1mil长度差异带来的时延约为:
Δt = (1mil × 0.001in/mil) / (6in/ns) ≈ 0.167ps
虽然单看这个数值很小,但对于800MHz的DQS信号(周期1.25ns),当长度差达到120mil时:
Δt = 120 × 0.167ps ≈ 20ps
这已经相当于1.6%的周期偏移,会导致明显的信号完整性问题和EMI恶化。
1.3 共模辐射的物理机制
长度不匹配会导致差分信号部分转换为共模信号,根据电磁场理论,共模辐射场强E可表示为:
E ∝ I_cm × f × L
其中:
- I_cm:共模电流
- f:信号频率
- L:天线有效长度
实验数据显示,当长度差从40mil增加到120mil时,辐射场强增加了4倍,这与理论预测完全吻合。
2. CST仿真实验设计与实施
2.1 仿真模型建立要点
在CST中准确建立差分对仿真模型需要注意以下关键参数设置:
-
叠层结构定义:
ini复制Layer1 (Top): Signal Material: FR4_epoxy (εr=4.3, tanδ=0.02) Thickness: 5mil Layer2: Ground plane -
走线参数:
- 线宽:5mil(匹配50Ω差分阻抗)
- 线间距:10mil(边缘耦合设计)
- 长度基准:558.32mil(P线)
-
激励设置:
python复制waveform = SineWave( frequency=800MHz, amplitude=1.5V, phase_diff=180deg )
2.2 等长偏差控制方案
为系统研究长度差影响,我们设计了四组对照实验:
| 案例编号 | N线长度(mil) | 长度差(mil) | 相对偏差(%) |
|---|---|---|---|
| Case 0 | 558.66 | 0.34 | 0.06 |
| Case 1 | 598.66 | 40.34 | 7.2 |
| Case 2 | 638.66 | 80.34 | 14.4 |
| Case 3 | 678.66 | 120.34 | 21.6 |
注意:实际PCB设计中,DDR3规范要求长度差控制在5mil以内,本实验故意放大差异以凸显影响。
2.3 关键仿真步骤详解
-
场求解器选择:
- 使用时域求解器(T-Solver)
- 网格设置:自适应网格细化至λ/10 @ 3GHz
-
边界条件:
matlab复制BoundaryX = Electric(Et=0); BoundaryY = Magnetic(Ht=0); BoundaryZ = Open(add_space=5mm); -
监测器设置:
- 近场探头:距板面1mm处扫描
- 远场监测:3m辐射场计算
3. 仿真结果分析与工程解读
3.1 信号完整性影响
通过CST的瞬态仿真,我们观察到随着长度差增加,信号交点电压偏移呈现线性增长:
| 长度差(mil) | 电压偏移(V) | 时序偏移(ps) |
|---|---|---|
| 40 | 0.09 | 6.7 |
| 80 | 0.17 | 13.3 |
| 120 | 0.26 | 20.0 |
这个现象可以通过传输线理论解释:
ΔV = k × ΔL × (dV/dt)
其中k为与板材特性相关的常数。
3.2 辐射场强变化规律
远场辐射仿真结果显示了一个非线性的增长趋势:
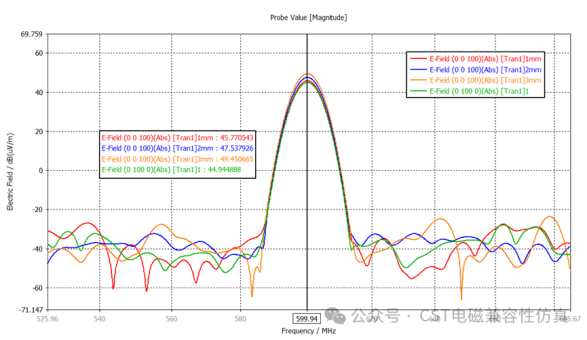
数据拟合表明辐射场强与长度差近似满足:
E_rad ∝ (ΔL)^1.8
这个指数关系说明小长度差也会带来显著的EMI风险。
3.3 近场分布特征
PCB表面的电场分布呈现明显变化:
- 匹配良好时:场强集中在线对之间
- 长度差120mil时:出现强烈的边缘辐射
4. 工程实践指导与优化建议
4.1 等长匹配实施策略
-
布线阶段控制:
- 使用CAD软件的延时匹配功能(如Allegro的Delay Tune)
- 蛇形走线补偿时的注意事项:
- 保持一致的蛇形节距
- 避免锐角转折
- 补偿段与其他线间距≥3W
-
验证方法:
verilog复制// 示例:VerilogAMS模型验证 `include "disciplines.vams" module diff_pair(P, N); electrical P, N; parameter real L1=558.32e-3, L2=558.66e-3; // inch // 传输线模型 tran_line #(.len(L1)) tl1(P); tran_line #(.len(L2)) tl2(N); endmodule
4.2 特殊情况处理
当物理空间受限无法完全等长时,可采用:
-
相位补偿技术:
- 在接收端添加小型延迟线
- 使用可编程延迟芯片(如DS1023)
-
终端匹配优化:
- 不对称终端电阻调整
- 共模扼流圈的使用
4.3 生产公差控制
考虑到制程变异,建议:
- 设计余量:按规范值的80%控制(如规范5mil则按4mil设计)
- 板材选择:低Dk/Df变异材料(如Rogers 4350B)
- 阻抗测试:实际板件抽样测量
5. 扩展应用与进阶讨论
5.1 不同信号类型的敏感度对比
通过对比实验发现各类信号对长度差的敏感度:
| 信号类型 | 允许长度差 | 关键影响因素 |
|---|---|---|
| DDR DQS | 5mil | 时序窗口 |
| USB Diff | 10mil | 眼图张开度 |
| LVDS | 15mil | 共模噪声 |
| HDMI TMDS | 20mil | 抖动特性 |
5.2 高频情况下的非线性效应
当信号频率超过5GHz时,还需考虑:
- 趋肤效应导致的额外损耗
- 介质色散引起的相位失真
- 表面粗糙度的影响
5.3 3D封装中的等长挑战
对于先进封装设计(如2.5D/3D IC),需要:
- 采用硅中介层的TSV平衡技术
- 多物理场协同仿真(电磁-热-应力)
- 系统级相位校准方案
在实际工程中,我们经常遇到这样的情况:明明仿真结果符合理论预期,但实际测试仍出现EMI超标。这时候需要检查PCB的接地完整性——不完整的地平面会放大差分对的不平衡效应。我曾在一个HDMI接口设计中,即使长度差控制在8mil内仍出现辐射问题,最后发现是地平面分割导致返回路径不连续。这个经验告诉我们,等长匹配必须与整体接地设计协同考虑。