
1. 静态时序分析(STA)基础概念与原理
1.1 STA的核心定义与工作机制
静态时序分析(Static Timing Analysis,STA)是数字集成电路设计中的关键验证环节。它通过遍历电路中所有可能的时序路径,检查信号在触发器采样窗口(setup和hold时间)内的稳定性。与动态仿真不同,STA不需要输入激励向量,而是基于电路拓扑结构和时序模型进行数学计算。
STA的本质是验证每个时序单元(主要是触发器)的建立时间和保持时间是否满足要求。建立时间(Tsetup)要求数据在时钟有效沿到来前保持稳定,而保持时间(Thold)则要求数据在时钟沿之后继续保持稳定。这两个参数共同构成了触发器的"采样窗口"。
关键路径(Critical Path)是指所有时序路径中延迟最长的一条,它直接决定了芯片能够工作的最高频率(Fmax = 1/Tmin)。STA会识别这些关键路径并报告时序违例(Timing Violation),指导设计者进行优化。
重要提示:STA仅适用于同步电路设计。异步电路由于缺乏统一的时钟参考,无法通过常规STA方法进行分析,需要采用特殊的验证手段。
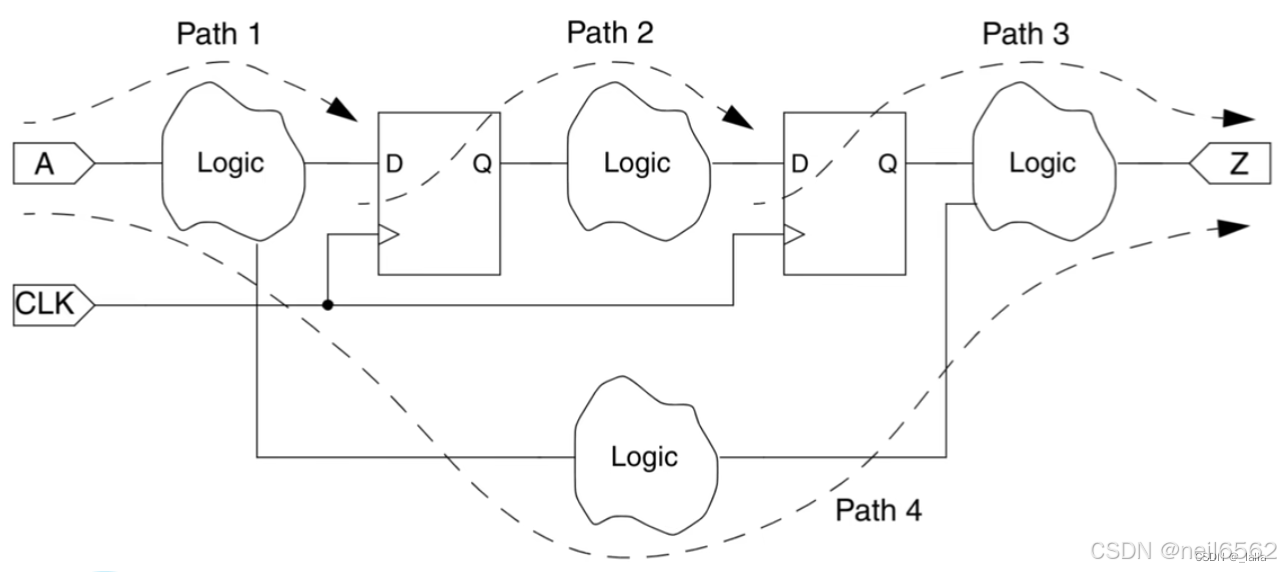
1.2 时序路径的四种基本类型
在数字设计中,所有信号传输路径可归纳为四类:
-
输入端口到寄存器(Pin2Reg):外部信号通过输入端口进入芯片,被第一个触发器捕获。需要约束输入延迟(set_input_delay)来定义外部器件到芯片输入端的传输时间。
-
寄存器到寄存器(Reg2Reg):芯片内部触发器之间的数据传输路径。这是最常见的时序路径类型,其延迟必须小于时钟周期减去建立时间。
-
寄存器到输出端口(Reg2Pin):内部触发器通过输出端口驱动外部器件。需要约束输出延迟(set_output_delay)来定义芯片输出到外部器件采样端的时间。
-
输入端口到输出端口(Pin2Pin):纯组合逻辑路径,信号直接从输入传到输出,不经过任何触发器。这类路径通常用最大/最小延迟(set_max_delay/set_min_delay)直接约束。
1.3 STA与动态仿真的对比分析
| 特性 | 静态时序分析(STA) | 动态仿真 |
|---|---|---|
| 验证方式 | 数学计算,穷举所有路径 | 基于输入激励的模拟 |
| 覆盖率 | 理论上100% | 依赖测试向量,难以全覆盖 |
| 运行速度 | 快(分钟级) | 慢(小时甚至天级) |
| 内存占用 | 较少 | 较多 |
| 优化指导 | 提供详细时序报告和违例路径 | 仅显示功能错误 |
| 适用场景 | 同步电路时序验证 | 功能验证和异步电路分析 |
在实际项目中,STA和动态仿真形成互补关系。STA确保所有触发器都能正确采样,而动态仿真验证电路的功能正确性。两者结合使用才能保证芯片的可靠工作。
2. 工艺-电压-温度(PVT)分析与工作条件
2.1 PVT参数对时序的影响
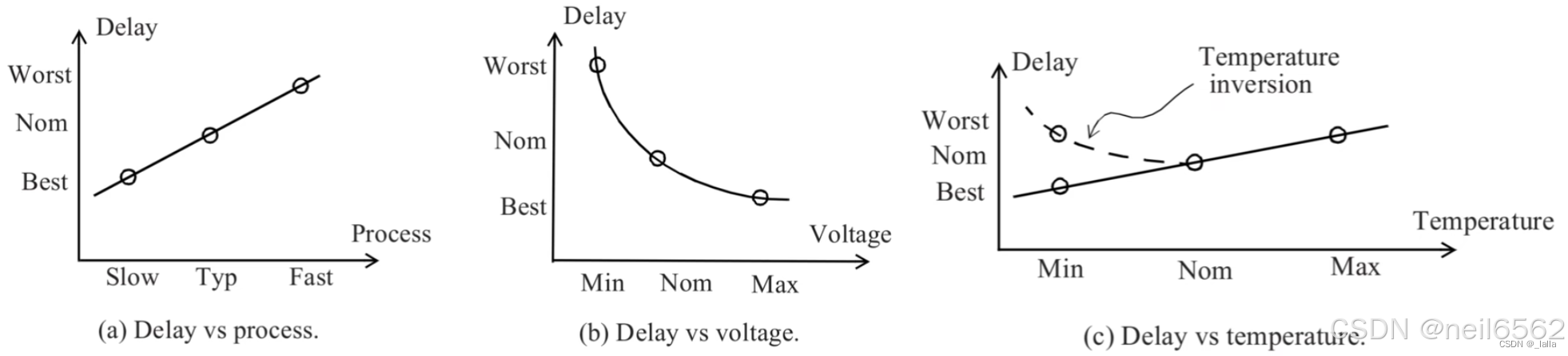
PVT代表工艺(Process)、电压(Voltage)和温度(Temperature)三个关键环境因素,它们直接影响晶体管的开关速度和互连线的电阻电容特性:
-
工艺偏差:制造过程中不可避免的物理尺寸和掺杂浓度变化,导致不同芯片甚至同一芯片不同区域的晶体管性能存在差异。通常分为快速(Fast)、典型(Typical)和慢速(Slow)三种情况。
-
电压波动:供电电压的变化会显著改变晶体管驱动能力。电压降低会导致延迟增加,电压升高则可能引起功耗和发热问题。
-
温度变化:高温增加载流子散射,降低迁移率;同时影响阈值电压。通常高温会使延迟增加,但某些工艺下低温反而会使延迟变大。
2.2 典型PVT组合与分析方法
在STA中,我们关注五种基本PVT组合:
-
TT(Typical-Typical):工艺典型值、标称电压、室温(25℃)。用于一般性能评估。
-
FF(Fast-Fast):NMOS和PMOS均为快速工艺、高电压、低温。用于保持时间分析。
-
SS(Slow-Slow):NMOS和PMOS均为慢速工艺、低电压、高温。用于建立时间分析。
-
FS(Fast-Slow):NMOS快速、PMOS慢速。用于某些特殊场景的功耗分析。
-
SF(Slow-Fast):NMOS慢速、PMOS快速。用于检查特定失效模式。
建立时间分析选择最坏情况(SS:高温+低压+慢速工艺),此时路径延迟最大,最容易违反建立时间。
保持时间分析选择最佳情况(FF:低温+高压+快速工艺),此时路径延迟最小,最容易违反保持时间。
2.3 实际项目中的工作条件设置
在芯片设计后期,通常会设置以下四种工作条件进行sign-off分析:
-
TT:工艺典型值、标称电压、25℃。用于功能验证和一般性能评估。
-
BC(Best Case):工艺FF、电压偏高(如+10%)、高温(125℃)。检查功耗和保持时间。
-
WC(Worst Case):工艺SS、电压偏低(如-10%)、室温。检查建立时间。
-
WCC(Worst-Cold Case):工艺SS、电压偏低、低温(-40℃)。某些工艺下延迟可能比高温更大。
经验分享:不同工艺厂商对PVT条件的命名可能不同,建议查阅工艺文档确认具体参数。例如,某些厂商用MCMM(Multi-Corner Multi-Mode)来管理不同工作条件。
3. 标准单元库与延时模型解析
3.1 标准单元库的结构与内容
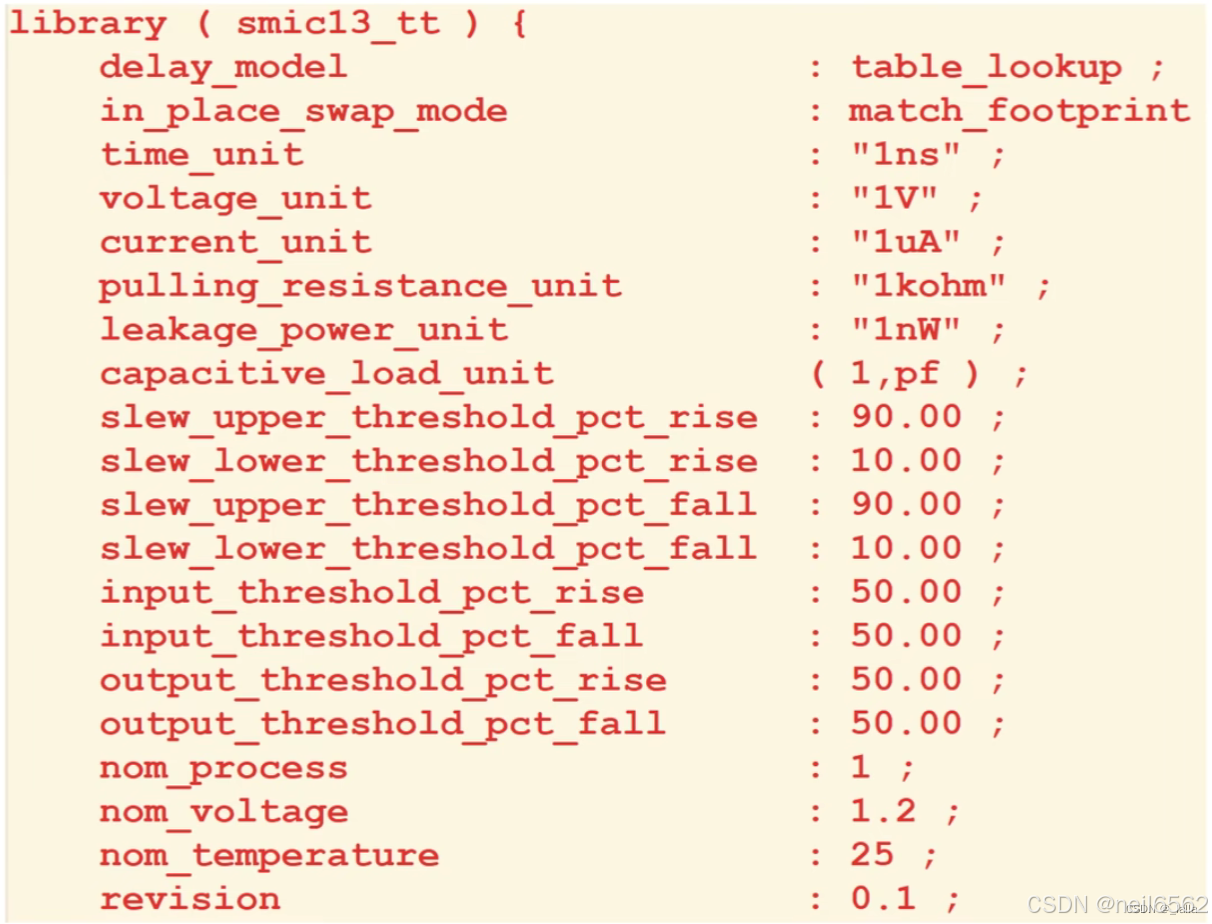
标准单元库是数字设计的基础,通常以.lib(可读文本)或.db(二进制)格式提供,包含以下关键信息:
- 单元定义:反相器、与门、或门、触发器等基本逻辑单元的描述。
- 时序参数:建立/保持时间、传播延迟、输出转换时间等。
- 功耗特性:静态功耗(漏电)和动态功耗(开关活动)。
- 物理信息:单元高度、宽度、引脚位置等布局布线所需数据。
3.2 延时模型的两种主要类型
3.2.1 线性延时模型
基本公式:D = D0 + D1 × S + D2 × C
- D0:固有延迟(与负载无关)
- D1:输入转换时间(Slew Rate)系数
- D2:输出负载电容系数
- S:输入信号的转换时间(10%-90%或20%-80%上升/下降时间)
- C:输出端的总负载电容(包括连线电容和扇入门电容)
线性模型计算简单但精度有限,主要用于早期估算或简单单元。
3.2.2 非线性延时模型
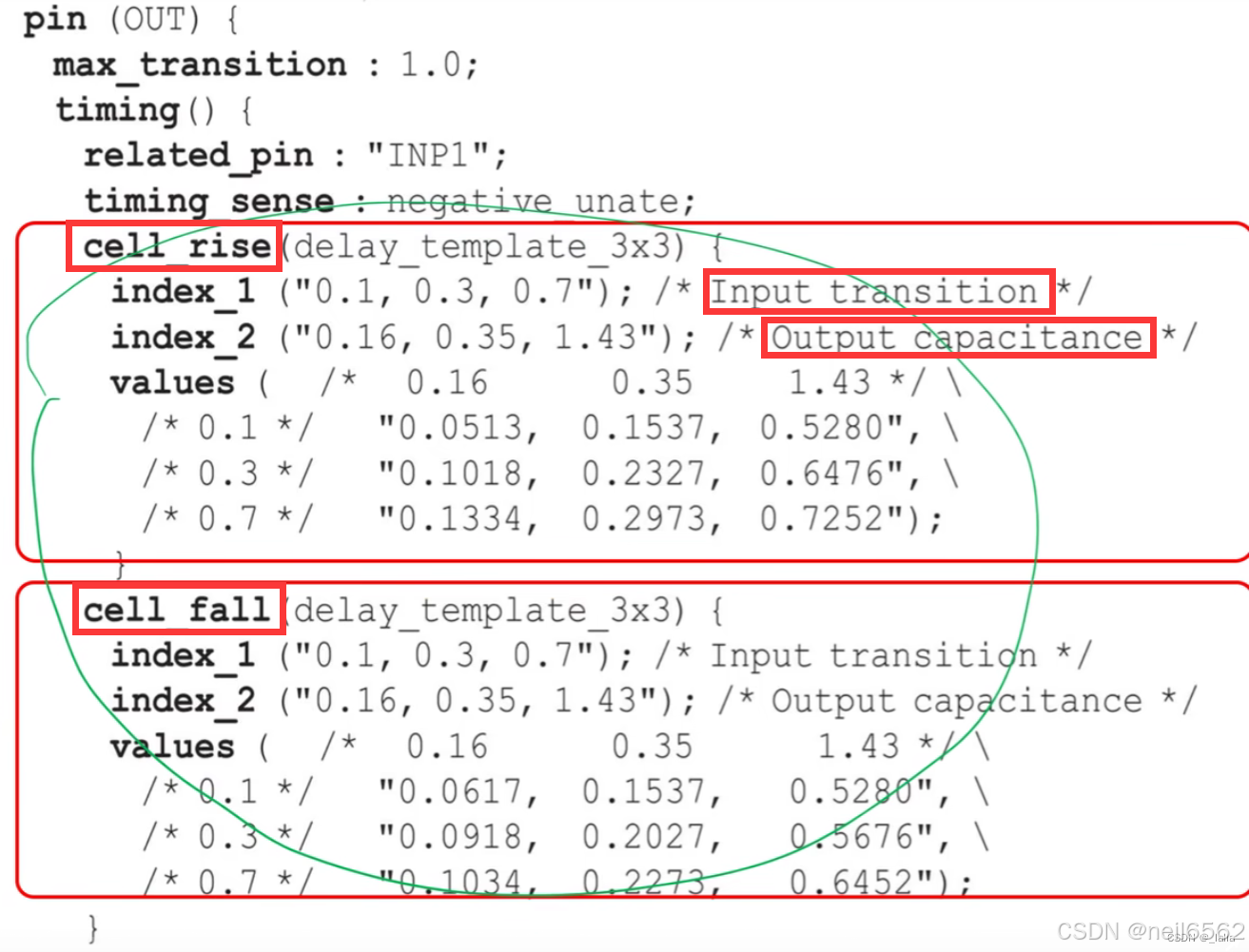
现代工艺普遍采用基于查找表(Look-Up Table,LUT)的非线性模型,通过多维表格精确描述延迟与输入转换时间、输出负载的关系。表格通常包括:
- 输入转换时间(0.1ns-1ns,按步长划分)
- 输出负载电容(0.1fF-10fF,按步长划分)
- 对应的延迟值和输出转换时间
3.3 Slew Derate机制详解
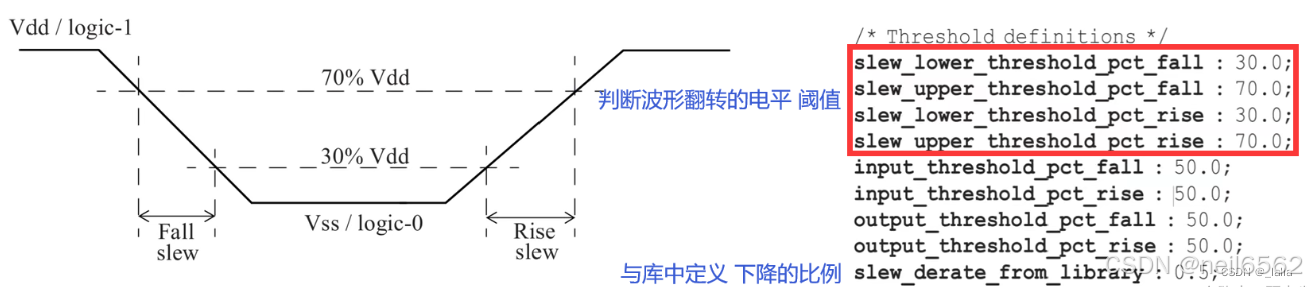
压摆率(Slew Rate)是信号从一个逻辑电平切换到另一个逻辑电平的速度,通常测量特定阈值点(如30%-70%)之间的时间差。Slew Derate是调整测量阈值点的机制:
- 早期工艺常用10%-90%作为测量点
- 现代工艺多用20%-80%或30%-70%,因为深亚微米工艺中波形边缘更平缓
- 通过设置slew derate系数(如0.5),可以将30%-70%的测量值等效转换为10%-90%的值
实操技巧:在STA工具中,可以通过set_slew_derate命令调整slew计算方式。不同工艺库可能有不同的默认测量阈值,需要查阅文档确认。
4. SDC时序约束的四大步骤
4.1 第一步:时钟定义与建模
时钟是同步电路的心脏,正确的时钟定义是STA的基础。主要任务包括:
-
主时钟定义:使用create_clock指定时钟源(端口或引脚)、周期、占空比和相位。
tcl复制create_clock -name SYSCLK -period 10 -waveform {0 5} [get_ports CLK] -
生成时钟声明:对PLL输出、分频器等衍生时钟使用create_generated_clock,必须绑定源时钟。
tcl复制create_generated_clock -name CLKDIV2 -source [get_pins PLL/CLKOUT] \ -divide_by 2 [get_pins DIV/Q] -
时钟不确定性:通过set_clock_uncertainty预留时序裕量,覆盖抖动(Jitter)和偏斜(Skew)。
tcl复制set_clock_uncertainty -setup 0.15 [get_clocks SYSCLK] set_clock_uncertainty -hold 0.05 [get_clocks SYSCLK] -
时钟延迟设置:分为源延迟(时钟源到芯片)和网络延迟(芯片内部布线),使用set_clock_latency。
tcl复制set_clock_latency -source 1.5 [get_clocks SYSCLK] # 源延迟 set_clock_latency 0.8 [get_clocks SYSCLK] # 网络延迟 -
时钟转换时间:在CTS前用set_clock_transition设置理想时钟的边沿斜率。
tcl复制set_clock_transition 0.1 [get_clocks SYSCLK]
4.2 第二步:I/O接口约束
I/O约束定义了芯片与外部器件的时序关系,确保信号在正确的时刻被采样:
-
输入延迟约束:set_input_delay指定外部器件到芯片输入端的传输时间。
tcl复制set_input_delay -clock SYSCLK -max 2.5 [get_ports DATA_IN] set_input_delay -clock SYSCLK -min 1.0 [get_ports DATA_IN] -
输出延迟约束:set_output_delay指定芯片输出到外部器件采样端的时间。
tcl复制set_output_delay -clock SYSCLK -max 3.0 [get_ports DATA_OUT] set_output_delay -clock SYSCLK -min -0.5 [get_ports DATA_OUT] -
驱动能力建模:
- set_driving_cell:用标准单元模拟外部驱动
- set_input_transition:直接指定输入信号斜率
tcl复制set_driving_cell -lib_cell INVX4 [get_ports CTRL] set_input_transition 0.15 [get_ports RST_N] -
负载设置:set_load定义输出引脚驱动的外部电容。
tcl复制set_load 10pF [get_ports DRAM_DQ]
4.3 第三步:时钟域关系定义
复杂的SoC通常包含多个时钟域,需要明确定义它们的关系:
-
异步时钟声明:set_clock_groups -asynchronous切断不相关时钟域间的时序分析。
tcl复制
set_clock_groups -asynchronous -group {CLK_A} -group {CLK_B} -
互斥时钟声明:
- -logically_exclusive:逻辑互斥(如时钟MUX的两个输入)
- -physically_exclusive:物理互斥(不会同时存在)
tcl复制
set_clock_groups -logically_exclusive -group {CLK1 CLK2} -
伪路径约束:set_false_path完全忽略特定路径的时序检查。
tcl复制
set_false_path -from [get_clocks CLK_A] -to [get_clocks CLK_B]
4.4 第四步:时序例外处理
针对特殊路径调整默认的单周期时序检查规则:
-
多周期路径:set_multicycle_path放宽复杂逻辑的时序要求。
tcl复制set_multicycle_path -setup 2 -from [get_registers CALC*] -to [get_registers OUT_REG] set_multicycle_path -hold 1 -from [get_registers CALC*] -to [get_registers OUT_REG] -
最大/最小延迟:set_max_delay/set_min_delay直接约束路径延迟。
tcl复制set_max_delay 5.0 -from [get_ports ASYNC_IN] -to [get_registers SYNC_REG] -
时序弧禁用:set_disable_timing打断组合逻辑环。
tcl复制
set_disable_timing -from A -to Z [get_cells MUX1] -
模式分析:set_case_analysis固定某些信号值。
tcl复制set_case_analysis 1 [get_ports TEST_MODE]
5. 关键SDC命令详解与实战示例
5.1 时钟相关命令深度解析
5.1.1 生成时钟的特殊处理
生成时钟(如分频器输出)必须绑定源时钟,工具会自动计算插入延迟:
tcl复制create_clock -name CLK_MAIN -period 10 [get_pins PLL/CLKOUT]
create_generated_clock -name CLK_DIV2 -source PLL/CLKOUT \
-divide_by 2 [get_pins DIV2/Q]
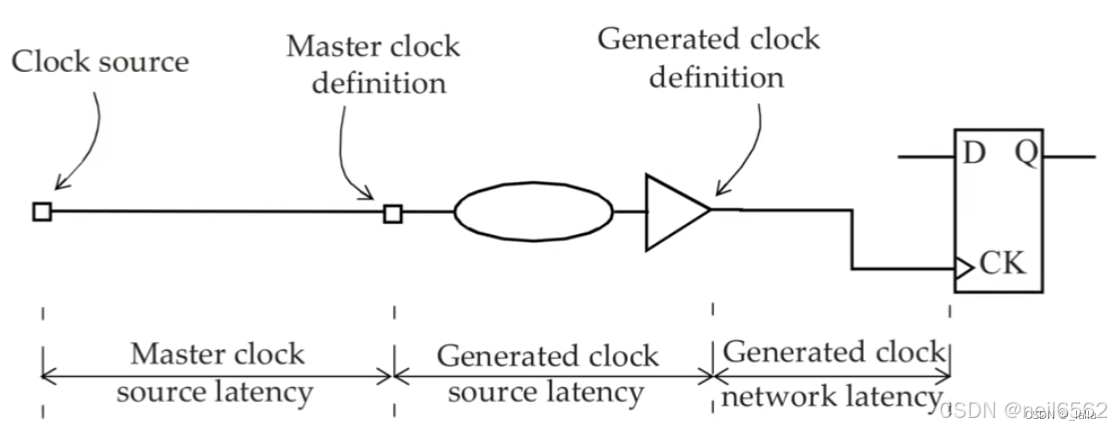
延迟计算规则:
- 生成时钟的源延迟 = 主时钟定义点到生成时钟定义点的延迟
- 寄存器时钟端总延迟 = 主时钟源延迟 + 生成时钟源延迟 + 生成时钟网络延迟
5.1.2 虚拟时钟的应用场景
虚拟时钟(Virtual Clock)不与任何物理端口连接,用于约束I/O时序:
tcl复制create_clock -name VIRT_CLK -period 8 -waveform {0 4}
set_input_delay -clock VIRT_CLK -max 2.7 [get_ports ROW_IN]
典型应用场景:
- 芯片I/O与外部器件时钟不同步时
- 输入输出端口需要不同的时钟约束时
- 早期设计阶段,实际时钟网络尚未确定时
5.2 I/O约束的工程实践
5.2.1 输入延迟计算实例
考虑下图所示输入路径:
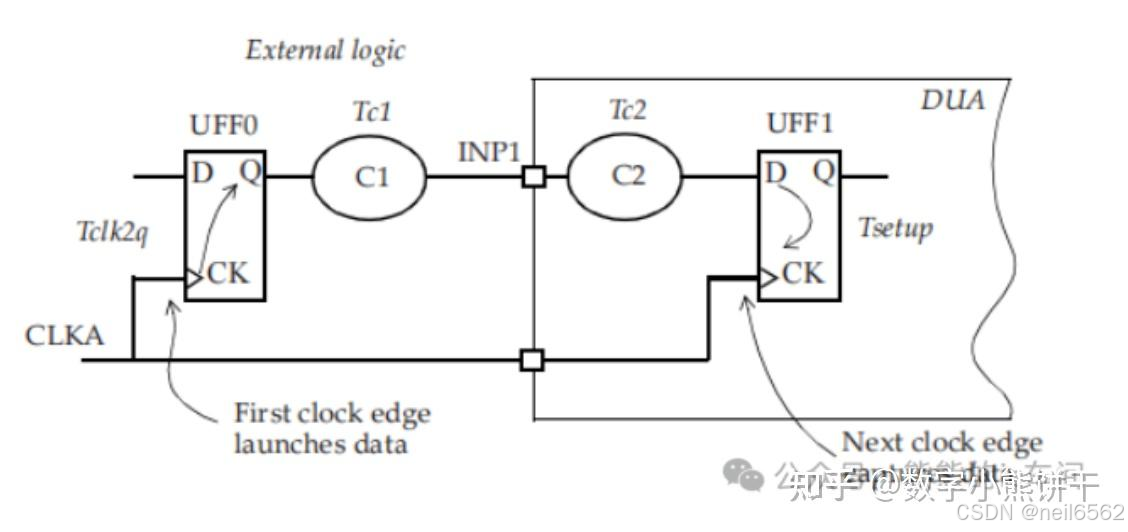
假设:
- 外部触发器Tclk2q_max=1.1ns, Tclk2q_min=0.8ns
- 组合逻辑Tc1_max=5.6ns, Tc1_min=2.2ns
- 时钟周期=15ns
则输入延迟约束为:
tcl复制create_clock -period 15 -waveform {5 12} [get_ports CLKA]
set_input_delay -clock CLKA -max 6.7 [get_ports INP1] # 1.1+5.6
set_input_delay -clock CLKA -min 3.0 [get_ports INP1] # 0.8+2.2
对应的时序检查条件:
- 建立时间:Tsetup + Tcomb < 15 - 6.7 = 8.3ns
- 保持时间:Tcomb > Thold - 3.0
5.2.2 输出延迟计算实例
考虑下图所示输出路径:
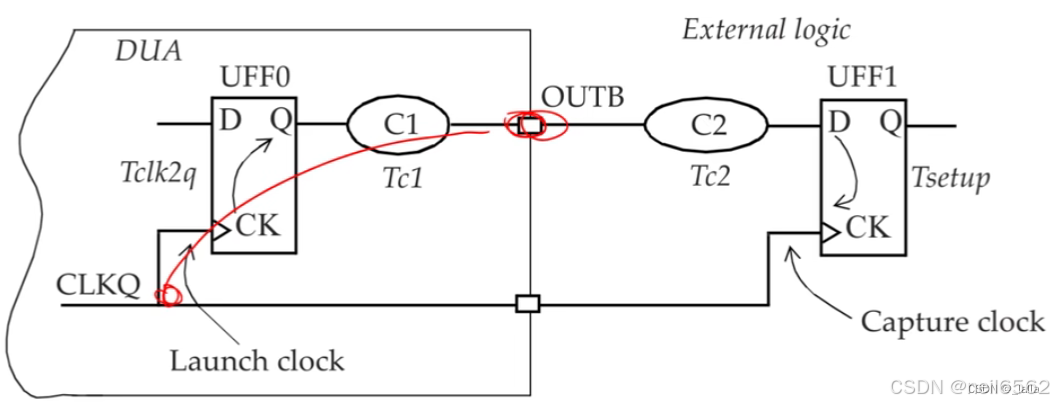
假设:
- 外部触发器Tsetup=0.4ns, Thold=0.2ns
- 组合逻辑Tc2_max=7ns, Tc2_min=0ns
- 时钟周期=20ns
则输出延迟约束为:
tcl复制create_clock -period 20 -waveform {0 15} [get_ports CLKQ]
set_output_delay -clock CLKQ -max 7.4 [get_ports OUTB] # 7+0.4
set_output_delay -clock CLKQ -min -0.2 [get_ports OUTB] # 0-0.2
对应的时序检查条件:
- 建立时间:Tclk2q + Tcomb < 20 - 7.4 = 12.6ns
- 保持时间:Tclk2q + Tcomb > 0.2ns
5.3 时钟不确定性分解
时钟不确定性(Uncertainty)包含三个主要成分:
- 时钟抖动(Jitter):时钟源本身的周期波动
- 时钟偏斜(Skew):时钟到达不同触发器的相位差
- 额外裕量(Margin):预留的设计余量
在项目不同阶段,不确定性设置策略不同:
- 综合阶段:通常设置较大的值(如10%周期)
- 布局后:可降低至7%-8%
- 时钟树综合后:可进一步降低,主要保留抖动分量
跨时钟域不确定性设置示例:
tcl复制set_clock_uncertainty -from CLK_A -to CLK_B -setup 0.5
set_clock_uncertainty -from CLK_A -to CLK_B -hold 0.3
6. 高级约束技术与实战经验
6.1 多周期路径约束技巧
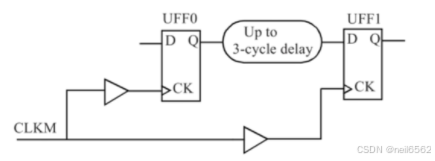
多周期路径(Multicycle Path)用于放宽复杂逻辑的时序要求。关键点:
- 建立时间关系:-setup N表示允许数据在N个周期后到达
- 保持时间关系:-hold N-1表示保持时间检查前移N-1个周期
- 常见应用场景:
- 慢速算法单元(如大位宽乘法器)
- 周期性的使能信号控制的数据路径
- 跨时钟域同步器的时序放松
典型设置示例:
tcl复制set_multicycle_path -setup 3 -from [get_pins UFF0/Q] -to [get_pins UFF1/D]
set_multicycle_path -hold 2 -from [get_pins UFF0/Q] -to [get_pins UFF1/D]
6.2 时序例外处理策略
6.2.1 伪路径(False Path)的合理使用
伪路径应谨慎使用,常见合法场景包括:
- 纯异步时钟域之间的路径
- 测试模式信号(正常功能下不变)
- 上电配置后不再变化的配置信号
- 异步复位/置位路径
示例:
tcl复制set_false_path -from [get_clocks USB_CLK] -to [get_clocks PCIE_CLK]
set_false_path -through [get_pins RST_SYNC*]
6.2.2 组合逻辑环的打断方法
组合逻辑环会导致STA无法收敛,必须打断:
tcl复制set_disable_timing -from S -to Z [get_cells UMUX0]
常见打断点选择原则:
- 选择反馈路径中最不关键的弧
- 优先打断控制路径而非数据路径
- 添加详细注释说明原因
6.3 跨时钟域约束实践
6.3.1 异步时钟域约束
对于完全异步的时钟域,必须切断时序分析:
tcl复制set_clock_groups -asynchronous -group {CLK_A} -group {CLK_B}
6.3.2 同步器路径约束
对两级同步器路径的特殊处理:
tcl复制set_max_delay -from [get_registers ASYNC_REG] -to [get_registers SYNC_REG1] 1.0
set_false_path -from [get_registers SYNC_REG1] -to [get_registers SYNC_REG2]
6.3.3 格雷码总线约束
异步FIFO的格雷码指针需要严格约束偏斜:
tcl复制set_max_delay -from [get_registers GRAY_REG*] -to [get_ports FIFO_WPTR*] \
-datapath_only 0.2
7. 设计规则约束(DRC)与物理约束
7.1 电气规则约束
7.1.1 最大转换时间
防止信号边沿过缓导致功耗增加和逻辑错误:
tcl复制set_max_transition 0.5 [current_design]
7.1.2 最大电容负载
限制输出驱动的总电容:
tcl复制set_max_capacitance 1.0 [get_ports DRAM_DQ*]
7.1.3 最大扇出
防止驱动能力不足:
tcl复制set_max_fanout 20 [get_nets high_fanout_net]
7.2 物理实现约束
7.2.1 面积约束
设置芯片面积上限:
tcl复制set_max_area 1000
7.2.2 功耗约束
动态和静态功耗限制:
tcl复制set_max_dynamic_power 200mW
set_max_leakage_power 50mW
7.2.3 多电压域约束
定义电压区域和电平转换器:
tcl复制create_voltage_area -name VA1 -guard_band {5 5 5 5} \
-coordinate {10 10 90 90}
set_level_shifter_threshold -voltage 0.8
8. 工程实践中的常见问题与解决方案
8.1 时钟约束常见错误
-
缺失生成时钟约束:导致时序分析不准确,特别是PLL和分频器路径。
-
过度约束时钟不确定性:浪费设计裕量,增加实现难度。
-
忽略跨时钟域约束:产生大量虚假违例,掩盖真正问题。
解决方案:
- 使用check_timing命令检查时钟约束完整性
- 分阶段调整不确定性值(综合→布局→布线)
- 明确所有时钟域关系,添加必要约束
8.2 I/O约束典型问题
-
输入/输出延迟方向错误:max/min设置颠倒导致严重时序问题。
-
忽略虚拟时钟应用:当芯片I/O时钟与内部时钟不同步时。
-
驱动/负载设置不合理:过于乐观导致实际板级问题。
解决方案:
- 建立检查清单,确认max/min方向
- 与系统团队确认接口时序要求
- 预留足够的板级裕量(通常增加20%)
8.3 时序例外滥用风险
-
过度使用伪路径:可能掩盖真实的时序问题。
-
多周期路径设置不当:导致保持时间违例。
-
组合逻辑环未完全打断:STA无法收敛。
解决方案:
- 为每个例外添加详细注释说明原因
- 建立例外管理流程,定期review
- 使用report_exceptions验证约束效果
9. 工具使用技巧与报告分析
9.1 常用Tcl查询命令
-
设计对象查询:
tcl复制get_cells -hier *reg* # 查找所有包含reg的单元 get_pins -of [get_cells U1] -filter "direction==out" # 获取U1的输出引脚 -
时钟信息查询:
tcl复制
report_clock -skew -attributes [all_clocks] -
时序路径查询:
tcl复制
report_timing -from [get_registers REG1] -to [get_registers REG2]
9.2 时序报告关键指标
-
建立时间裕量(Setup Slack):
code复制Startpoint: REG1 (rising edge-triggered flip-flop) Endpoint: REG2 (rising edge-triggered flip-flop) Path Group: CLK_GROUP Slack: 0.25ns (MET) -
保持时间裕量(Hold Slack):
code复制Startpoint: REG3 (rising edge-triggered flip-flop) Endpoint: REG4 (rising edge-triggered flip-flop) Path Group: CLK_GROUP Slack: -0.12ns (VIOLATED) -
关键路径分析:
code复制Point Incr Path ------------------------------------------------------ clock CLK_MAIN (rise edge) 0.00 0.00 REG1/CLK (DFF) 0.00 0.00 REG1/Q (DFF) 0.35 0.35 UAND1/A (AND2) 0.05 0.40 UAND1/Z (AND2) 0.15 0.55 REG2/D (DFF) 0.05 0.60 data arrival time 0.60 clock CLK_MAIN (rise edge) 10.00 10.00 clock uncertainty -0.15 9.85 library setup time -0.20 9.65 data required time 9.65 ------------------------------------------------------ data required time 9.65 data arrival time -0.60 slack 9.05
9.3 约束调试技巧
-
约束覆盖检查:
tcl复制
report_constraint -all_violators -
约束有效性验证:
tcl复制
check_timing -verbose -
约束覆盖分析:
tcl复制
report_analysis_coverage
10. 项目实战经验分享
10.1 复杂时钟系统约束案例
某SoC项目包含以下时钟:
- 主时钟:200MHz(CPU)
- 衍生时钟:100MHz(总线)、50MHz(外设)
- 外部接口时钟:166MHz(DDR)、125MHz(PCIe)
约束策略:
- 明确定义所有主时钟和生成时钟
- 声明异步时钟域(CPU与PCIe)
- 对DDR接口设置严格的输入输出延迟
- 为时钟切换电路设置logically_exclusive
tcl复制# 主时钟定义
create_clock -name CLK_CPU -period 5 [get_ports clk_cpu]
# 生成时钟定义
create_generated_clock -name CLK_BUS -source [get_pins PLL/CLKOUT] \
-divide_by 2 [get_pins DIV2/Q]
# 异步时钟声明
set_clock_groups -asynchronous -group {CLK_CPU CLK_BUS} \
-group {CLK_PCIE}
# DDR接口约束
set_input_delay -clock CLK_DDR -max 1.5 [get_ports ddr_dq*]
set_output_delay -clock CLK_DDR -max 1.2 [get_ports ddr_dqs*]
10.2 跨时钟域设计约束经验
-
明确CDC策略文档:记录所有跨时钟域信号和采用的同步方法。
-
约束与验证匹配:
- 两级同步器:设置max_delay和false_path
- 异步FIFO:约束格雷码计数器偏斜
- 握手信号:添加多周期约束
-
验证完整性:
tcl复制
report_cdc -detail -verbose
10.3 低功耗设计约束要点
-
多电压域约束:
tcl复制
create_voltage_area -name VA_CORE -power VDD_CORE -ground VSS set_level_shifter_strategy -bottom_up -
电源门控约束:
tcl复制set_power_switch -name SW1 -domain PD1 \ -control_port [get_ports pwr_ctrl] \ -on_state {pwr_ctrl 1} -off_state {pwr_ctrl 0} -
状态保持约束:
tcl复制
set_retention -name RET1 -retention_power_net VDD_RET \ -retention_ground_net VSS [get_cells SAVE_REG*]
11. 总结与进阶建议
11.1 高效约束设计原则
- 完整性:覆盖所有时钟、I/O和特殊路径
- 准确性:基于实际系统需求,避免过度约束
- 可维护性:良好注释和组织结构
- 可重用性:模块化约束,便于项目复用
11.2 学习路径建议
-
基础阶段:
- 掌握STA基本概念和SDC语法
- 理解建立/保持时间原理
- 练习基本时钟和I/O约束
-
中级阶段:
- 学习跨时钟域约束方法
- 掌握时序例外处理技巧
- 理解物理约束与时序的关系
-
高级阶段:
- 研究先进工艺下的时序挑战(如OCV、AOCV)
- 掌握低功耗设计约束方法
- 学习约束验证和调试技巧
11.3 推荐资源
-
官方文档:
- Synopsys Design Constraints (SDC) User Guide
- PrimeTime User Guide
-
经典书籍:
- 《Static Timing Analysis for Nanometer Designs》
- 《Advanced ASIC Chip Synthesis》
-
实践平台:
- 开源EDA工具(如OpenROAD)
- FPGA开发套件(实践I/O约束)
在实际项目中,我深刻体会到良好的时序约束不仅是工具能接受的语法,更是设计意图的精确表达。建议初学者从简单设计开始,逐步增加复杂度,同时养成检查约束完整性和合理性的习惯。记住,约束不是一成不变的,需要随着设计阶段不断调整和优化。