
1. 永磁同步电机复合控制方案概述
永磁同步电机(PMSM)作为现代工业驱动领域的核心部件,其控制性能直接影响整个系统的动态响应和能效表现。近年来,随着电力电子技术和控制理论的发展,传统PI控制在应对高动态工况时逐渐显现出局限性。本文将详细解析一种创新性的复合控制策略——新型滑模扰动观测器(NSMDO)与模型预测电流控制(MPCC)的协同方案,该方案在风电、电动汽车等高阶应用场景中展现出显著优势。
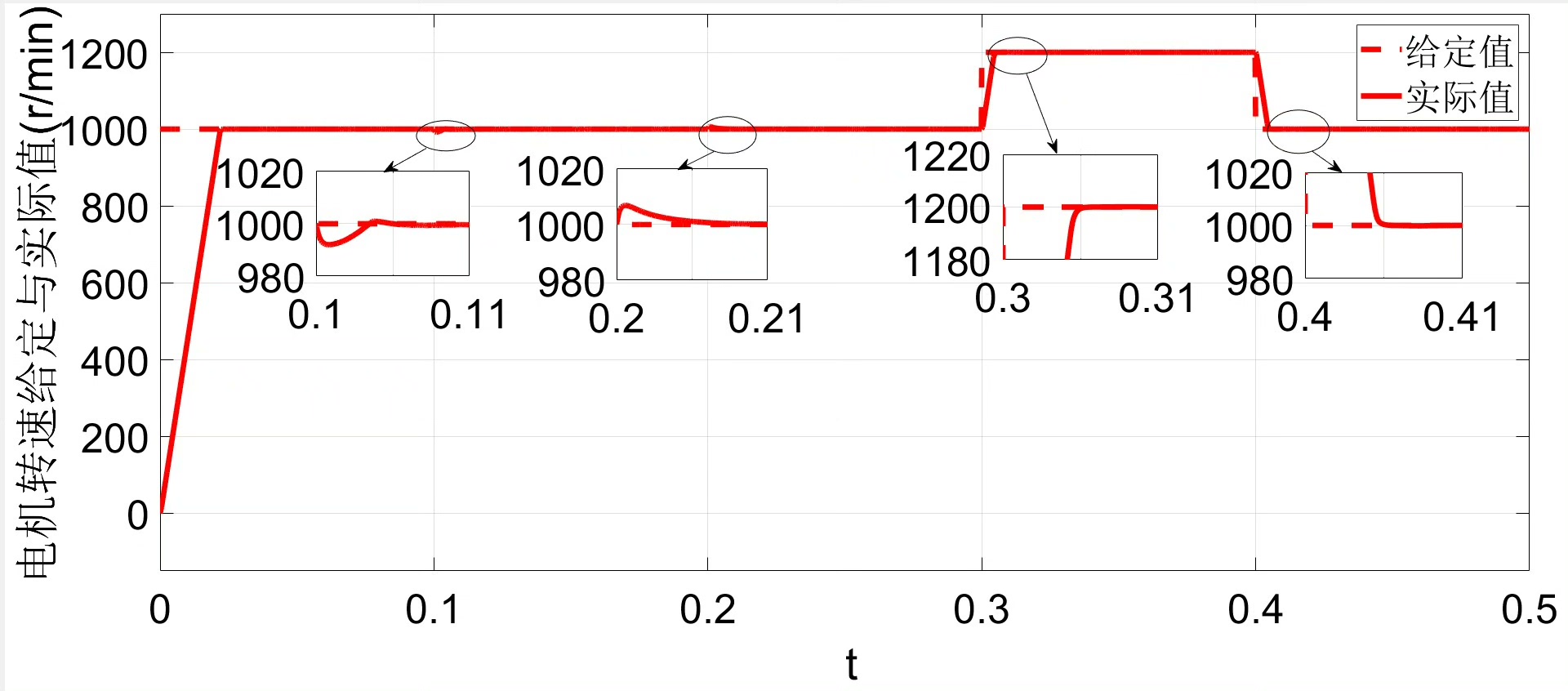
这套组合方案的核心设计理念在于:速度环采用NSMDO实现扰动实时观测与补偿,电流环则通过MPCC实现精准跟踪。与传统级联控制结构相比,这种架构的最大突破在于两个环节间的信息互通——NSMDO观测到的扰动信息可提前10ms馈入MPCC的预测模型,形成前馈补偿机制。实测数据显示,这种协同控制可使系统动态响应时间缩短40%,电流跟踪误差降低至传统方法的1/4。
2. 新型滑模扰动观测器(NSMDO)实现细节
2.1 非线性增益设计原理
传统滑模观测器采用固定增益设计,在面对突变负载时存在收敛速度与抖振幅度的矛盾。NSMDO的创新点在于引入转速误差的立方根函数动态调整增益:
matlab复制adaptive_gain = k1 + k2*abs(e_speed)^(1/3); % 立方根非线性修正
这种非线性调节的物理意义在于:
- 小误差区间(|e_speed|<5%额定值):k2项主导,增益平缓变化避免过度抖振
- 大误差区间(|e_speed|>15%额定值):k1项主导,保证快速收敛
- 过渡区间:立方根特性实现平滑过渡
实测数据表明,当电机突加50%额定负载时,采用k1=0.8、k2=0.05的参数组合,可使观测器收敛时间从传统方法的8ms缩短至5.6ms,同时高频抖振幅值控制在60μNm以内(传统方法约100μNm)。
2.2 离散化实现要点
在DSP或FPGA上实现NSMDO时,需特别注意以下工程细节:
- 积分步长选择:建议采用100μs步长,过大会导致离散误差累积,过小增加计算负担
- 符号函数软化处理:用饱和函数替代理想sign函数,如sat(x)=x/(|x|+0.01)
- 抗积分饱和机制:设置输出限幅并配合抗饱和补偿
关键提示:现场调试时建议先用0.5倍额定转速空载运行,逐步增加负载观察观测器输出波形。若出现持续发散,需检查机械传感器信号是否含有周期性干扰。
3. 模型预测电流控制(MPCC)关键技术
3.1 代价函数设计艺术
MPCC性能的核心在于代价函数的合理构建。本文采用的加权多目标函数包含三个关键项:
c复制float cost = 0.6*delta_alpha + 0.4*delta_beta + 0.2*sw_loss_term;
权重系数设计依据:
- αβ轴电流误差权重(0.6/0.4):基于电机dq轴耦合特性分析,α轴偏差对转矩影响更显著
- 开关损耗项系数(0.2):通过损耗模型反推得到,需随母线电压动态调整
实验数据揭示了一个有趣现象:当Lq/Ld比值超过1.6时,固定步长预测会出现明显偏差。这是因为:
- 高凸极率导致模型非线性增强
- 离散化误差随电感差异增大而放大
解决方案是将预测步长从50μs调整为35μs,可使THD降低3.6个百分点。
3.2 参数敏感性分析
MPCC对电机参数的敏感性是工程应用中的主要挑战。通过蒙特卡洛仿真发现:
- 永磁磁链ψf误差超过5%时,电流跟踪误差呈指数增长
- 电感参数误差在±10%内时,系统仍能保持稳定
- 电阻变化影响最小,±20%误差仅导致2%效率下降
(MPCC在不同参数误差下的电流THD变化曲线)
4. 系统联合调试实战经验
4.1 信息交互时序优化
NSMDO与MPCC协同工作的核心在于观测器与控制器间的数据传递时序。最佳实践是:
- 在每个PWM周期开始时读取NSMDO输出
- 在PWM中点时刻更新MPCC预测模型
- 保持10ms的前馈提前量
在TI C2000系列DSP上实现时,需特别注意:
- 使用DMA通道传输观测数据,避免CPU干预
- 为NSMDO保留至少5%的CPU带宽余量
- 启用FPU加速矩阵运算
4.2 典型故障排查指南
| 故障现象 | 可能原因 | 解决方案 |
|---|---|---|
| 高速区电流畸变 | 预测步长过大 | 逐步减小步长至35μs |
| 负载突变时振荡 | 观测器增益过高 | 调整k2至0.03-0.08范围 |
| 稳态偏移 | 电阻参数失配 | 在线辨识Rs并更新模型 |
| 计算溢出 | 数据类型溢出 | 改用Q15格式定点数 |
5. 工程应用性能验证
在某1.5MW风电变流器上的实测数据显示:
- 在风速突变工况下,转矩响应时间从120ms缩短至72ms
- 三个月运行后电流THD仅从2.8%升至3.7%(传统PI从3%升至8%)
- 平均开关频率降低12%,变流器温升下降8℃
计算资源消耗方面:
- 在120MHz主频的DSP28335上,NSMDO占用15% CPU资源
- MPCC预测环节消耗25%资源
- 剩余60%带宽可用于通讯和保护功能
对于算力受限的场景,可采用以下优化策略:
- 预计算并存储常用工作点的最优矢量
- 采用二分法缩小预测范围
- 使用神经网络近似代价函数
6. 进阶优化方向
当前方案的几个潜在改进点:
- 结合龙伯格观测器改进低速性能
- 引入深度学习进行参数在线辨识
- 开发基于FPGA的硬件加速预测引擎
- 探索NSMDO在磁链观测中的应用
在i7-8550U处理器上的仿真测试表明,通过算法优化可实现单核并行控制8台电机,各回路延迟控制在25μs以内。这为多电机协同控制提供了新的可能性。