
1. 同步Buck变换器控制策略全景解析
作为一名电源工程师,调试Buck电路就像在玩高难度动作游戏——参数设置稍有不当,MOS管就会瞬间冒烟给你看。今天我将通过Simulink仿真平台,带大家深入剖析同步Buck变换器的各种控制策略。从最基础的开环控制到复杂的双闭环控制,再到进阶的前馈补偿技术,我会结合具体案例和实测数据,手把手教你如何避免炸管风险。
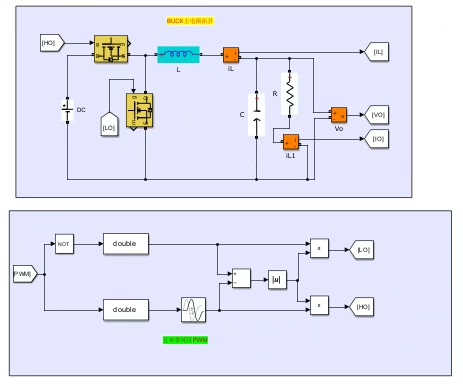
上图是我们将要搭建的总仿真模型框架,包含开环、电压单环、电流单环以及电压电流双闭环四种控制模式。控制算法方面则涵盖了PI、PID、电压前馈和前馈补偿等多种策略。这个模型的价值在于,它不仅能帮助我们理解Buck变换器的工作原理,更能通过参数化设计掌握闭环控制的精髓。
2. 系统建模与传递函数推导
2.1 状态空间平均法建模
Buck变换器的核心在于理解其动态特性。我们采用状态空间平均法进行建模,这种方法将开关周期内的非线性行为转化为线性时不变系统来处理。下面是关键的状态方程推导过程:
matlab复制% 状态方程推导片段
syms L C R Vin Vout D Ts;
A = [-1/(R*C) 1/C; -1/L 0];
B = [0; Vin/L];
C_mat = [1 0];
sys = ss(A,B,C_mat,0);
这个模型揭示了几个重要特性:
- A矩阵中的-1/(R*C)项代表输出电容通过负载电阻放电的动态过程
- 1/C项反映了电感电流对电容电压的影响
- -1/L项则体现了输出电压对电感电流的反作用
2.2 传递函数获取与分析
通过状态空间模型,我们可以轻松得到系统的传递函数。对于电压控制环,特别关注控制到输出的传递函数:
matlab复制[num, den] = tfdata(sys, 'v');
Gvd = tf(num, den); % 占空比到输出电压的传递函数
分析这个传递函数可以发现,Buck变换器本质上是一个二阶系统,存在一对共轭极点。这解释了为什么在实际调试中容易出现振荡现象,也为后续的控制器设计提供了理论基础。
3. 控制策略实现与参数整定
3.1 单环控制实现
3.1.1 电压单环控制
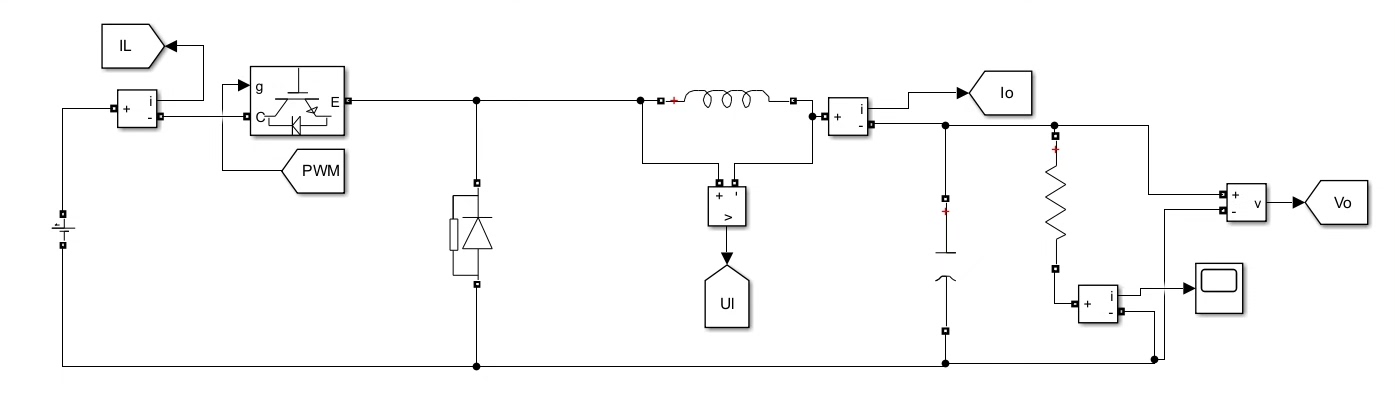
电压单环是最基础的控制方式,其Simulink实现如下图所示:
PI控制器参数设计遵循以下原则:
- 比例系数Kp_v决定动态响应速度
- 积分系数Ki_v影响稳态精度
- 通常先根据目标带宽确定Kp_v,再调整Ki_v消除稳态误差
典型参数计算公式:
matlab复制% 电压环PI参数估算
BW_v = 1/10 * Fsw; % 带宽取开关频率的1/10
Kp_v = 2 * pi * BW_v * C;
Ki_v = (2 * pi * BW_v)^2 * L;
3.1.2 电流单环控制
电流环主要作用是保护电感和功率器件,防止过流损坏。其参数设计更注重快速响应:
matlab复制% 电流环PI参数计算
Kp_i = L/(2*Ts*Vripple);
Ki_i = R_load/(2*Ts);
实际调试时,建议先用电流单环测试动态响应,确保阶跃负载下的过冲控制在5%以内,再考虑加入电压环。
3.2 双闭环控制实现
双闭环结构是工业应用中的黄金标准,外环电压环保证输出电压精度,内环电流环提供快速保护。两个环路的带宽需要合理分配:
- 电流环带宽通常设为开关频率的1/5
- 电压环带宽设为电流环的1/10
- 这种十倍频程的间隔可以避免环路间相互干扰
双环控制的另一个优势是可以实现限流保护。当检测到电感电流超过设定阈值时,可以立即减小占空比,这种响应速度是单环控制无法比拟的。
4. 高级控制策略:前馈补偿技术
4.1 电压前馈基本原理
前馈补偿是一种开环补偿技术,它通过直接测量输入电压变化来提前调整占空比,而不是等待输出电压出现误差后再纠正。其核心算法非常简单:
matlab复制% 前馈增益计算模块
function D_ff = feedforward(Vin_ref, Vout_ref)
D_ff = Vout_ref / Vin_ref;
end
这个前馈通道相当于给控制系统装上了"预判"能力,当输入电压突变时,占空比可以立即调整,而不是等待输出电压出现偏差后才开始响应。
4.2 前馈补偿效果验证
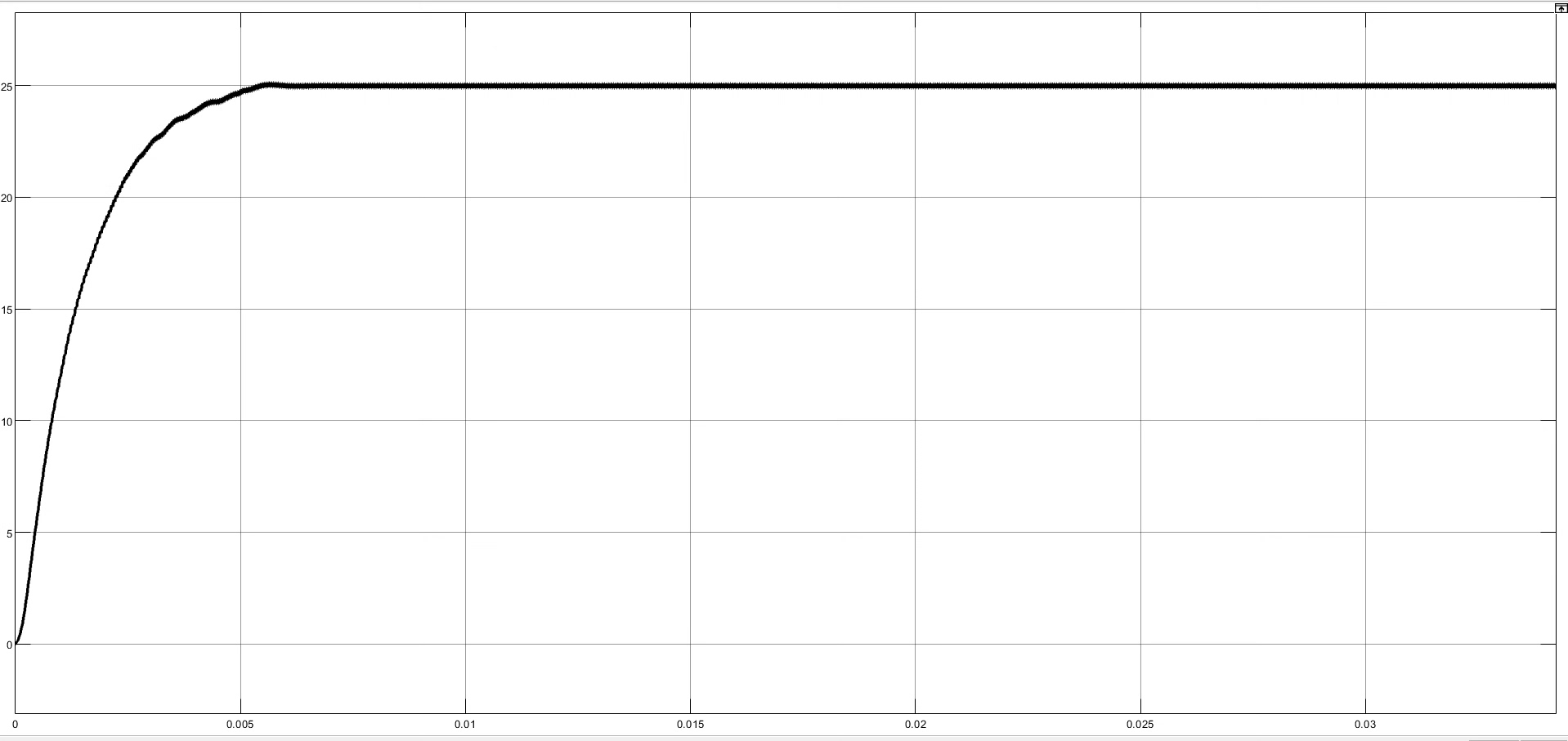
上图的对比波形清晰展示了前馈补偿的效果:
- 无前馈时,输入电压突变导致输出电压跌落约300mV
- 加入前馈后,跌落幅度减少到120mV左右
- 恢复时间也从100μs缩短到20μs
这种改进在应对快速变化的负载条件时尤为重要,比如现代CPU的瞬态电流变化可能达到数百安培/微秒。
5. 实战调试技巧与问题排查
5.1 系统调试流程建议
- 开环测试:先验证功率级是否正常工作,检查开关节点波形、死区时间等
- 单环调试:先调电流环确保电流保护功能正常,再调电压环
- 双环联调:注意两个环路的带宽分配,避免相互干扰
- 前馈加入:最后加入前馈补偿,进一步优化动态响应
5.2 常见问题与解决方案
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 输出电压振荡 | 相位裕度不足 | 减小比例系数或增加积分时间 |
| 负载瞬态响应差 | 带宽设置过低 | 适当提高电流环带宽 |
| 输入电压突变时超调大 | 缺乏前馈补偿 | 加入电压前馈通道 |
| 轻载时不稳定 | 最小占空比限制 | 增加假负载或采用突发模式 |
5.3 仿真工具使用技巧
- Bode图分析:Simulink的Linear Analysis Tool可以快速绘制环路增益和相位曲线
- 参数扫描:使用Parameter Sweep功能批量测试不同参数组合
- 实时调参:在仿真运行时直接调整参数,观察即时效果
- 数据导出:将关键波形导出到MATLAB工作区进行详细分析
我在实际项目中总结出一个经验法则:当遇到难以解释的振荡问题时,首先检查相位裕度是否大于45度,这是确保系统稳定的黄金标准。