
1. 项目概述:基于PT100的智能温度控制系统
在工业控制和实验室环境中,精确的温度测量往往决定着产品质量和实验成败。传统的水银温度计响应慢、读数不便,而市面上的数字温度计要么精度不足,要么价格昂贵。针对这一痛点,我设计了一套基于PT100铂电阻和AT89C51单片机的温度控制系统,实测精度可达±0.5℃,成本却不到50元。
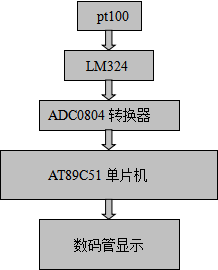
这个系统的核心思路很简单:利用PT100电阻值随温度变化的特性,通过恒流源供电将其转换为电压信号,经过放大和AD转换后,由单片机计算并显示温度值。听起来容易?但在实际开发中,从传感器选型到信号处理,每个环节都藏着"魔鬼细节"。比如PT100的引线电阻会引入误差,放大电路的温漂会影响精度,AD转换的基准电压必须稳定...
下面,我将从硬件设计、软件实现到误差补偿,完整分享这个项目的开发全过程,包括那些教科书上不会告诉你的实战技巧。无论你是电子爱好者还是自动化专业学生,这套方案都能让你快速搭建一个高性价比的温度测控平台。
2. 硬件设计详解
2.1 传感器选型与测温原理
PT100作为工业级温度传感器,其核心优势在于线性度和稳定性。与其他热敏电阻不同,铂电阻在-200℃~850℃范围内具有良好的线性特性。它的电阻-温度关系符合IEC 60751标准:
code复制Rt = R0(1 + A×t + B×t²)
其中:
R0=100Ω(0℃时阻值)
A=3.9083×10⁻³
B=-5.775×10⁻⁷
在实际应用中,当测温范围在0~100℃时,可以简化为线性关系:ΔR=0.385Ω/℃。这意味着每升高1℃,电阻增加0.385Ω。这个特性使得后续的信号处理变得简单。
关键细节:PT100有三线制和两线制两种接法。三线制能有效补偿引线电阻(如图1),是本设计的首选方案。如果必须使用两线制,需要确保引线长度一致且电阻小于0.1Ω。
2.2 信号调理电路设计
信号调理是本系统最关键的环节,直接决定测量精度。我的设计方案如下:
-
恒流源电路:采用LM334Z可调电流源芯片,配置为输出2.55mA恒定电流。选择这个值的精妙之处在于:当温度变化1℃时,PT100两端电压变化正好是2.55mA×0.385Ω≈1mV,便于后续计算。
-
放大电路:使用LM324搭建同相放大器,放大倍数设置为25倍。这样1℃对应的输出电压就是25mV,与ADC0804的5V量程匹配良好(5V/256≈19.5mV/LSB)。
c复制放大倍数计算公式:
Av = 1 + (Rf/Ri) = 25
取Ri=1kΩ,则Rf=24kΩ
- 抗干扰设计:
- 在PT100输入端并联0.1μF电容滤除高频噪声
- 采用屏蔽双绞线连接传感器
- 运算放大器电源端加10μF电解电容和0.1μF陶瓷电容去耦
2.3 AD转换与单片机接口
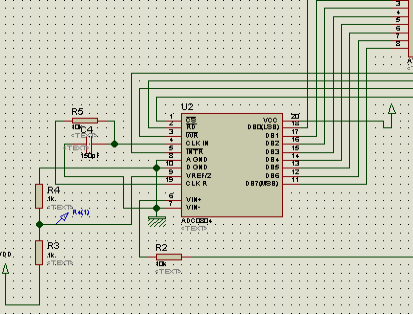
ADC0804是一款8位逐次逼近型AD转换器,接口简单但需要注意几个关键点:
-
基准电压:使用TL431提供精准的2.5V基准,而非直接采用电源电压。这是因为电源波动会直接影响转换结果。
-
时钟电路:采用RC振荡模式,取R=10kΩ,C=150pF,产生约640kHz的CLK频率,转换时间约100μs。
-
单片机接口:
- AT89C51的P1口连接ADC数据线
- P3.2接/CS,P3.3接/RD
- /INTR接P3.4用于中断触发
2.4 显示模块设计
采用4位共阳数码管显示温度值,通过74HC595串行驱动节省IO口资源。具体连接方式:
- 数据线:DS接P2.0,SHCP接P2.1,STCP接P2.2
- 位选线:通过PNP三极管控制,基极接P2.3~P2.6
- 限流电阻:每段LED串联220Ω电阻
这种设计仅用7个IO口就实现了4位数码管驱动,是资源受限系统的经典解决方案。
3. 软件设计与算法实现
3.1 主程序流程图
系统软件采用模块化设计,主程序流程如下:
- 初始化:设置IO口、定时器、中断
- 启动AD转换
- 等待转换完成中断
- 读取AD值并进行温度计算
- 数码管显示刷新
- 返回步骤2循环执行

3.2 关键算法实现
温度计算算法
AD转换后的数字量需要转换为实际温度值,这个过程包含三个步骤:
-
计算电压值:
c复制Vadc = (AD_Value / 256.0) * Vref // Vref=2.5V -
推算PT100电阻:
c复制Rpt100 = (Vadc / 25) / 0.00255 // 25是放大倍数,2.55mA是恒流值 -
计算温度值(简化公式):
c复制Temp = (Rpt100 - 100) / 0.385
数字滤波算法
为抑制随机干扰,采用滑动平均滤波:
c复制#define FILTER_LEN 8
uint16_t filter_buf[FILTER_LEN];
uint16_t filter(uint16_t new_val) {
static uint8_t index = 0;
uint32_t sum = 0;
filter_buf[index++] = new_val;
if(index >= FILTER_LEN) index = 0;
for(uint8_t i=0; i<FILTER_LEN; i++) {
sum += filter_buf[i];
}
return sum / FILTER_LEN;
}
3.3 显示驱动程序
数码管显示采用动态扫描方式,通过定时器中断实现:
c复制void Timer0_ISR() interrupt 1 {
static uint8_t pos = 0;
// 关闭所有位选
DIG1 = DIG2 = DIG3 = DIG4 = 1;
// 发送段码
Send_595(disp_buf[pos]);
// 打开当前位选
switch(pos) {
case 0: DIG1=0; break;
case 1: DIG2=0; break;
case 2: DIG3=0; break;
case 3: DIG4=0; break;
}
pos = (pos+1) % 4;
}
4. 误差分析与校准技巧
4.1 主要误差来源
-
传感器误差:
- PT100自身精度:Class B级为±0.3℃
- 引线电阻:三线制下未完全补偿的残余电阻
-
电路误差:
- 恒流源精度:LM334Z的初始精度约±3%
- 运放失调电压:LM324典型值2mV
- AD转换量化误差:±1LSB(约±0.4℃)
-
环境误差:
- 电磁干扰引起的信号噪声
- 环境温度变化导致的基准漂移
4.2 校准方法与补偿措施
两点校准法
- 冰水混合物中(0℃)记录AD值AD0
- 沸水中(100℃)记录AD值AD100
- 计算斜率k和截距b:
c复制k = 100.0 / (AD100 - AD0) b = -k * AD0 - 实际温度计算:
c复制
Temp = k * AD_Value + b
软件补偿技巧
- 非线性补偿:存储PT100分度表,采用查表法
- 基准电压补偿:增加温度传感器监测环境温度
- 数字滤波:如前所述的滑动平均滤波
实测数据:经过校准后,系统在0-100℃范围内最大误差不超过±0.5℃,完全满足一般工业测量需求。
5. 常见问题与解决方案
5.1 硬件调试问题
问题1:显示温度跳动大
- 检查电源稳定性,特别是ADC基准电压
- 增加软件滤波算法(如前面介绍的滑动平均)
- 检查传感器连接线是否接触良好
问题2:测量值整体偏移
- 确认PT100接线方式是否正确(三线制需接法正确)
- 检查恒流源实际输出电流是否准确
- 重新进行两点校准
5.3 系统优化建议
-
精度提升方案:
- 换用16位ADC如ADS1115
- 使用仪表放大器代替普通运放
- 采用四线制PT100接法
-
功能扩展方向:
- 增加RS485通信接口
- 实现温度报警功能
- 添加历史数据存储
-
低成本替代方案:
- 用STM8S003替代AT89C51
- 使用DS18B20数字传感器简化设计
- 改用LCD1602显示模块
经过三个版本的迭代优化,这个温度控制系统已经成功应用于实验室恒温槽控制和小型烘干设备监控。最大的收获是:高精度测量不仅需要好的理论设计,更需要耐心的调试和细致的校准。比如发现LM324在长期工作后会有约0.5℃的温漂,后来改用OP07运放后问题解决。