
1. 集成运放与电流源基础解析
作为一名电子工程师,我在设计高精度模拟电路时,集成运放和电流源是每天都要打交道的核心元件。很多人觉得这些概念抽象难懂,其实只要抓住几个关键点,就能快速掌握它们的精髓。
集成运放本质上就是一个高度集成的多级放大器,它必须同时满足两个看似矛盾的要求:高增益和稳定性。为了实现这个目标,工程师们采用了直接耦合的差分输入级+共射放大级+互补输出级的经典架构。这里有个很有意思的现象 - 你可能会好奇为什么不用阻容耦合?因为集成电路里做大电容就像在邮票上画清明上河图,既不现实也不经济。
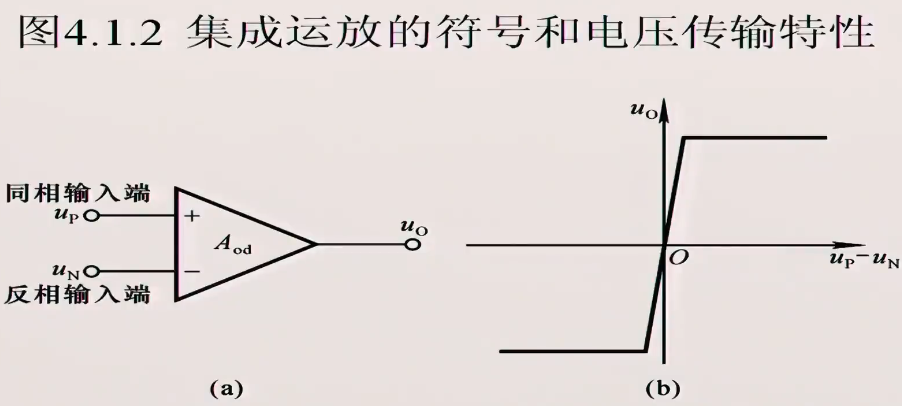
运放的传输特性曲线告诉我们三个重要特性:
- 差分输入是必须的 - 这就像用天平称重,需要两个托盘才能准确测量差异
- 线性区非常窄 - 典型值可能只有几毫伏,但对应的开环增益Aod却高达10^5量级
- 输出电压不可能超过电源电压 - 这是由半导体物理特性决定的硬限制
在实际电路设计中,中间级的共射放大电路面临一个经典难题:想要高增益就需要大Rc,但大Rc会导致工作电流太小。这个矛盾的最佳解决方案就是用电流源替代传统电阻,这也是我们今天要重点探讨的内容。
2. 镜像电流源:最基础的电流复制技术
2.1 基本结构与工作原理
镜像电流源是模拟电路中最基础也最重要的电流源结构,它的精妙之处在于完美利用了晶体管的一致性。我经常跟团队说,理解镜像电流源是掌握模拟IC设计的敲门砖。
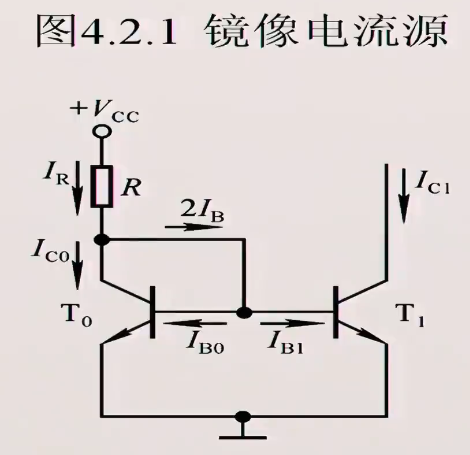
这个电路的核心思想很简单:两个完全相同的晶体管T0和T1,在相同的Vbe下必然产生相同的Ic。通过一个参考电阻R建立参考电流IR,输出电流IC1就会"镜像"这个参考电流。数学关系可以表示为:
IC1 = (β/(β+2))·IR ≈ IR (当β>>2时)
这里有个实用技巧:Ube在很大电流范围内变化很小(约0.7V),所以IR主要由(Vcc-Ube)/R决定。这意味着我们可以通过调节R精确控制输出电流。
2.2 实际应用中的注意事项
在我的项目经验中,镜像电流源有几点需要特别注意:
- 晶体管匹配度:实际生产中不可能完全一致,会导致镜像误差。解决方法是在版图设计时采用共质心布局
- 温度影响:双极型晶体管的β和Ube都随温度变化,高精度应用需要考虑温度补偿
- 最小工作电压:为保证晶体管工作在放大区,Vce至少要0.3V以上
重要提示:当需要镜像大电流时,参考电阻R上的功耗会变得很可观。例如10mA电流在1kΩ电阻上就会产生100mW功耗,这在集成电路中是不可接受的。这就引出了下一个改进方案 - 比例电流源。
3. 比例电流源:灵活的电流缩放技术
3.1 电路结构与工作原理
比例电流源解决了镜像电流源在大电流应用时的功耗问题。通过在发射极引入电阻,实现了电流的比例缩放,这是模拟电路中非常聪明的设计。
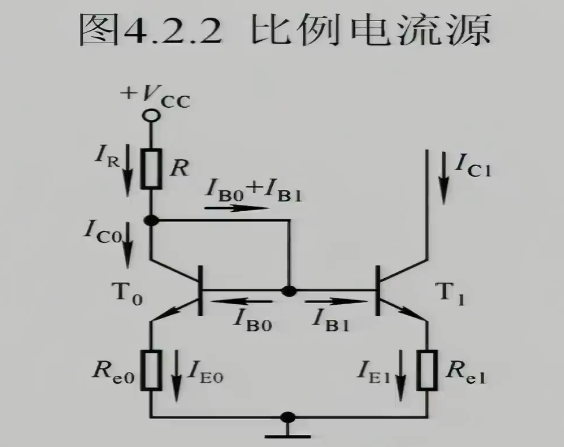
这个电路的分析关键在于基极节点的电位平衡:
IE0·Re0 + Ube0 = IE1·Re1 + Ube1
由于Ube0≈Ube1(差异通常在毫伏级),且IE≈IC,我们得到:
IC1 ≈ (Re0/Re1)·IR
这个关系式太有用了!它意味着我们可以用一个小电流IR控制一个大电流IC1,比例由电阻比值决定。在实际设计中,我通常会把Re0做得比Re1大,这样就能用较小的IR获得较大的IC1,显著降低参考支路的功耗。
3.2 设计要点与常见问题
在设计比例电流源时,我总结了几个关键经验:
- 电阻匹配比绝对值更重要 - 集成电路中电阻的比值精度可以做到0.1%以内,但绝对值可能有±20%偏差
- 注意晶体管的功率耗散 - 输出电流大的晶体管需要有足够的面积散热
- 启动问题 - 有时需要额外电路确保电流源能正常启动
一个常见的误区是认为比例系数可以无限增大。实际上,当Re0/Re1超过10:1时,Ube的微小差异就会引入显著误差。在我的项目中,通常将比例控制在5:1以内以保证精度。
4. 微电流源:精准的小电流生成技术
4.1 实现原理与电路分析
当我们需要uA级甚至nA级的微小电流时,直接产生这么小的参考电流IR非常困难。微电流源巧妙地利用了两个Ube的微小差异来产生精确的小电流。
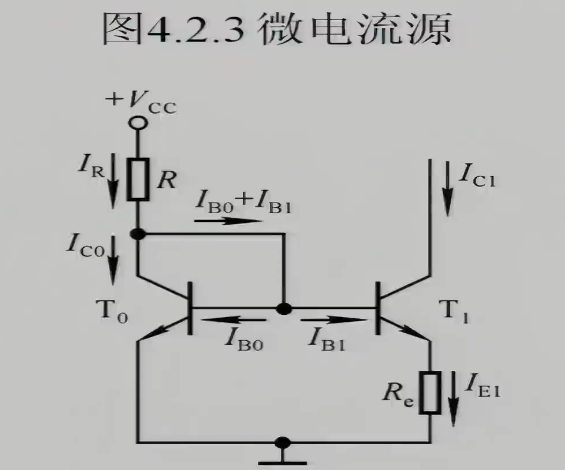
电路方程很简单:
IC1 ≈ (Ube0 - Ube1)/Re1
这里有个精妙之处:两个Ube的差值ΔUbe通常只有几十mV,因此用适度大小的Re1就能得到uA级电流。例如,当ΔUbe=26mV,Re1=26kΩ时,IC1≈1μA。
4.2 实际应用技巧
在生物医学传感器等需要极小电流的场合,微电流源非常有用。根据我的经验:
- 使用高阻值多晶硅电阻可以获得更好的温度稳定性
- 版图设计时要特别注意防止漏电流,可能需要增加保护环
- 低电流下β值会下降,可能需要考虑基极电流补偿
一个实用的设计技巧是:利用晶体管的面积比来精确控制ΔUbe。因为Ube=VT·ln(IC/IS),所以不同面积的晶体管在相同电流密度下会有精确的ΔUbe。
5. 改进型电流源:应对实际挑战的解决方案
5.1 加射极输出器的电流源
当使用β值较低的晶体管时,传统镜像电流源的误差会变得显著。这时加入射极输出器是个聪明的解决方案。
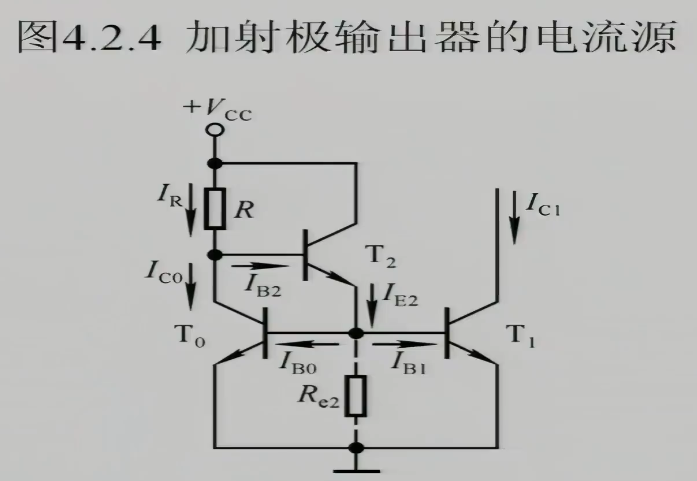
这个改进的关键点:
- T2作为射极跟随器,提高了输入阻抗,减少了基极电流分流
- Re2确保T2工作在合适的电流下,维持较高的β值
- 整体结构仍保持简单,只增加了一个晶体管
在实际项目中,我发现这个结构特别适合功率应用,因为功率晶体管的β通常较低。Re2的取值很关键 - 太大影响效率,太小则不能提供足够的偏置。
5.2 威尔逊电流源:高精度解决方案
威尔逊电流源是我在精密模拟电路中最常用的结构,它完美解决了β值影响和温度稳定性两大难题。
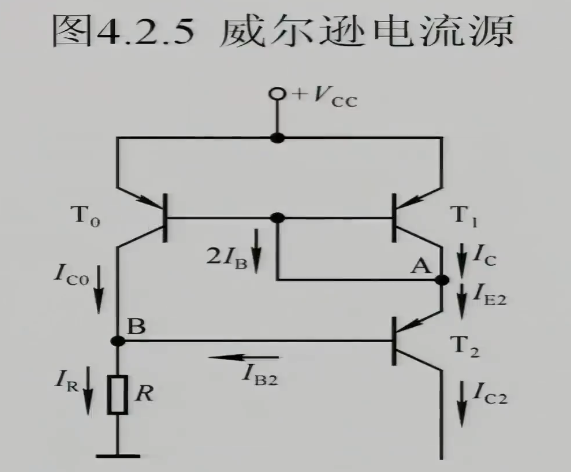
它的核心优势体现在两个公式上:
- 输出电流表达式:IC2 = IR·(1-2/(β²+2β+2))
- 温度稳定性:等效Re很大,对温度变化不敏感
第一个特性意味着即使β=10,误差也仅有约1.6%(传统结构可能有16%误差)。第二个特性使它在-40°C到125°C的宽温度范围内都能保持稳定。
在我的一个高精度ADC项目中,使用威尔逊电流源后,温度漂移从原来的500ppm/°C降到了50ppm/°C以下。代价只是增加了两个晶体管,非常划算。
6. 多路电流源:集成系统的供电解决方案
6.1 双极型多路电流源
现代集成运放往往需要多个不同大小的偏置电流,基于比例电流源的多路输出结构是理想选择。
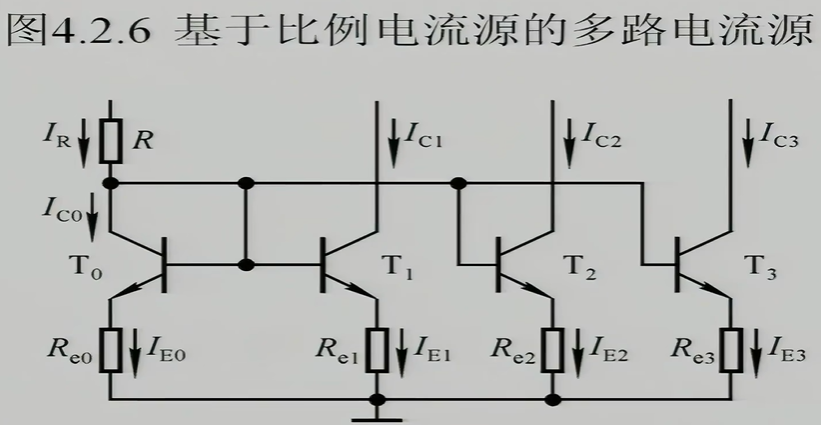
设计要点:
- 所有晶体管最好在同一衬底上同时制造,确保工艺一致性
- 发射极电阻的比值决定电流比例
- 参考支路要足够强壮,能驱动所有镜像支路
一个实用技巧:在版图设计时,将所有发射极电阻做成单元电阻的串联组合,可以提高匹配精度。我在一个运放项目中用这个方法实现了1%以内的电流比例精度。
6.2 MOS管多路电流源
随着工艺进步,MOS管电流源在现代IC中越来越普遍,主要优势在于:
- 面积小,更适合高集成度
- 栅极电流几乎为零,没有β值限制
- 通过宽长比(W/L)精确控制电流比例
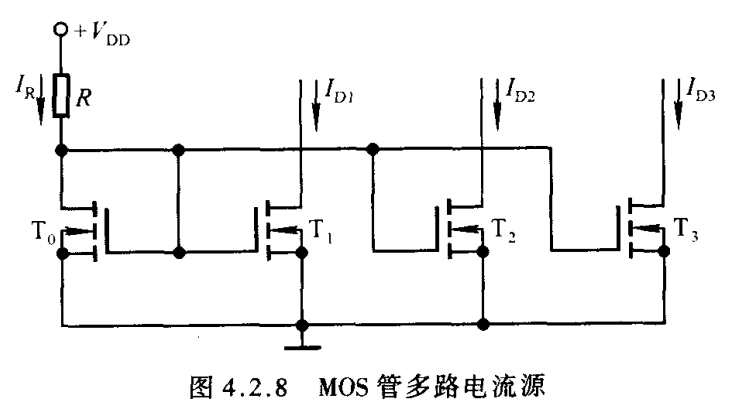
关键设计公式:
Id2/Id1 = (W2/L2)/(W1/L1)
这意味着我们可以通过晶体管的尺寸设计精确控制电流比,而不需要额外电阻。在我的一个CMOS图像传感器项目中,用这种方法实现了16路精确匹配的偏置电流。
调试技巧:遇到电流不准时,首先检查各MOS管的栅源电压是否一致,这比直接测量电流更容易定位问题。