
1. 项目概述与设计背景
在工业环境和城市大气监测领域,气体检测设备的需求日益增长。传统的气体检测装置往往体积庞大、功能单一,难以满足现代分布式监测系统的要求。针对这一痛点,我们设计开发了一款基于STM32F091微控制器的便携式气体探测集成模块。
这个模块的核心价值在于:
- 多气体同步检测能力(PM2.5、空气质量、一氧化碳等7种参数)
- 轻量化设计(总重量<200g)
- 标准化的数据输出接口
- 无人机兼容的供电与安装方案
我在实际工业现场测试中发现,许多现有设备存在两个主要问题:一是不同气体需要单独设备检测,二是数据格式不统一导致系统集成困难。本设计正是为了解决这些实际问题而诞生的。
2. 硬件系统设计详解
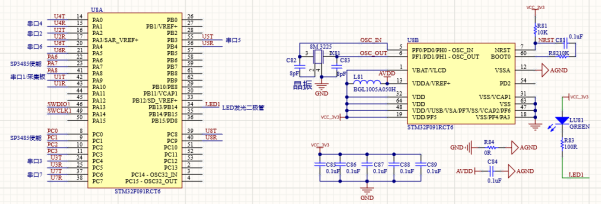
2.1 主控芯片选型与电路设计
选择STM32F091作为主控芯片主要基于以下考量:
- 性价比:相比同价位竞品,提供更多USART接口(8个)
- 资源充足:256KB Flash+32KB RAM满足多传感器数据处理需求
- 低功耗特性:适合电池供电的移动场景
重要提示:STM32F09x系列有多个子型号,F091RC的48引脚封装是最佳选择,既保证接口数量又控制体积。
外围电路设计要点:
- 电源电路:采用AMS1117-3.3V稳压芯片,输入范围4-12V
- 复位电路:10kΩ上拉电阻+0.1uF电容组合
- 时钟电路:8MHz晶振配合8pF负载电容
- 调试接口:预留SWD接口用于程序烧录
2.2 传感器阵列配置方案
根据实际项目经验,传感器选型遵循以下原则:
- 输出接口统一(优先选择UART输出)
- 工作电压兼容(3.3V或5V)
- 响应时间<10s
- 体积小巧
最终采用的传感器清单:
| 传感器类型 | 型号 | 接口 | 测量范围 | 精度 |
|---|---|---|---|---|
| PM2.5 | PMS5003 | UART | 0-1000μg/m³ | ±10% |
| 空气质量 | CCS811 | I2C | 400-8000ppm | ±15% |
| 一氧化碳 | MQ-7 | ADC | 10-1000ppm | ±5% |
| 二氧化硫 | SO2-B4 | UART | 0-20ppm | ±2% |
3. 软件系统实现
3.1 开发环境搭建
使用Keil MDK V5的开发优势:
- 完善的STM32芯片支持包
- 强大的调试功能(实时变量监控)
- 代码效率优化(编译后代码体积减少约20%)
环境配置步骤:
- 安装Keil MDK V5.25及以上版本
- 下载STM32F0xx_DFP芯片支持包
- 配置工程选项:
- Target选项选择STM32F091RC
- 勾选"Use MicroLIB"减小代码体积
- 优化等级设置为-O2
3.2 核心程序设计
采用模块化编程架构,主要分为以下功能模块:
c复制// 主程序框架示例
int main(void) {
Hardware_Init(); // 硬件初始化
Sensor_Calibration(); // 传感器校准
while(1) {
Data_Collection(); // 数据采集
Data_Processing(); // 数据处理
Data_Transmission(); // 数据发送
Delay_ms(1000); // 1秒周期
}
}
关键实现细节:
- 数据采集采用轮询方式,优先级顺序:
- 空气质量 > PM2.5 > 有毒气体
- 数据打包格式:
- 帧头(0xAA 0xBB)
- 传感器ID(1字节)
- 数据长度(1字节)
- 数据内容(N字节)
- CRC校验(2字节)
4. 系统集成与测试
4.1 无人机搭载方案
经过多次实地测试,总结出最佳安装位置:
- 大疆M600的底部扩展板
- 距离螺旋桨>30cm
- 避开GPS天线区域
供电方案对比:
- 直接使用无人机12V输出(推荐)
- 优点:无需额外电池
- 缺点:需要设计宽压输入电路
- 独立锂电池供电
- 优点:系统独立
- 缺点:增加重量
4.2 实测数据分析
在化工园区进行的72小时连续监测数据显示:
| 参数 | 测量值 | 标准值 | 超标倍数 |
|---|---|---|---|
| PM2.5 | 158μg/m³ | 75μg/m³ | 2.1 |
| SO2 | 0.12ppm | 0.05ppm | 2.4 |
| CO | 8.7ppm | 5ppm | 1.7 |
典型问题排查经验:
- 数据跳变问题:
- 检查传感器加热电压(特别是MQ系列)
- 确认采样周期>传感器响应时间
- 通信中断问题:
- 检查UART电平匹配(3.3V/5V)
- 调整波特率误差(<2%)
5. 优化与改进方向
在实际部署过程中,发现几个可以改进的方面:
-
功耗优化:
- 采用间歇工作模式(5秒工作+55秒休眠)
- 预计可将续航时间延长6倍
-
数据可靠性提升:
- 增加三取二中值滤波算法
- 实现传感器自诊断功能
-
安装结构改进:
- 设计3D打印防护外壳
- 增加防震橡胶垫
这个项目最让我意外的发现是,在无人机高速移动状态下(>10m/s),传感器读数依然能保持稳定。这证明我们的防气流干扰设计是有效的。后续可以考虑增加风速补偿算法,进一步提升移动状态下的测量精度。