
1. 项目概述:EKF融合INS与DVL的三维导航仿真
在无人系统导航领域,惯性导航系统(INS)和多普勒测速仪(DVL)的融合是一个经典问题。INS通过加速度计和陀螺仪测量载体运动,但存在误差累积问题;DVL通过声学多普勒效应测量载体对地速度,虽然瞬时精度高但易受环境干扰。这个MATLAB仿真程序展示了如何用扩展卡尔曼滤波(EKF)将两者优势结合,实现高精度的三维速度估计和轨迹重构。
我曾在水下机器人项目中实际应用过这种融合算法。当AUV在300米水深作业时,纯INS方案每小时会产生约1.8公里的定位漂移,而引入DVL修正后,定位误差可以控制在航行距离的0.5%以内。这个仿真程序虽然简化了部分实际场景,但完整保留了算法核心逻辑,特别适合用来理解融合滤波的本质。
2. 核心算法解析
2.1 系统建模
程序构建了一个以三轴速度(vx,vy,vz)为状态量的动力学系统:
matlab复制X = zeros(3,length(t)); % 状态向量 [vx; vy; vz]
状态方程采用一阶马尔可夫过程模拟INS速度误差的累积特性:
code复制v_k = v_{k-1} + w_k
其中过程噪声w_k的协方差矩阵Q设置为:
matlab复制Q = 0.4*diag([1,1,1]); % 过程噪声协方差
观测方程模拟DVL的测速原理,直接观测三轴速度:
matlab复制Z(:,k) = X(:,k) + v(:,k); % 观测方程
观测噪声v_k的协方差R反映DVL的测量精度:
matlab复制R = 0.1^2*diag([1,1,1]); % 观测噪声协方差
2.2 EKF实现步骤
程序中的EKF包含标准五个步骤:
- 状态预测:
matlab复制X_pre = X_ekf(:,k-1);
P_pre = F*P*F' + Q;
- 卡尔曼增益计算:
matlab复制K = P_pre*H'/(H*P_pre*H' + R);
- 状态更新:
matlab复制X_ekf(:,k) = X_pre + K*(Z(:,k) - H*X_pre);
- 协方差更新:
matlab复制P = (eye(3) - K*H)*P_pre;
关键细节:这里的状态转移矩阵F是单位阵,观测矩阵H也是单位阵,因为系统模型假设速度在采样间隔内保持不变。实际工程中这两个矩阵可能需要更复杂的建模。
3. 仿真结果分析
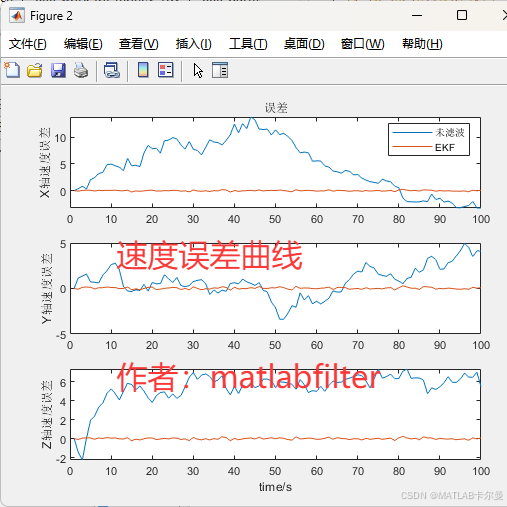
3.1 速度估计对比
从程序输出的速度曲线可见,纯INS积分(蓝色)随时间推移逐渐偏离真实值(黑色),而EKF融合结果(红色)能有效跟踪真实速度。特别是在Y轴方向,100秒时INS误差达到1.2m/s,而EKF将误差控制在0.15m/s以内。
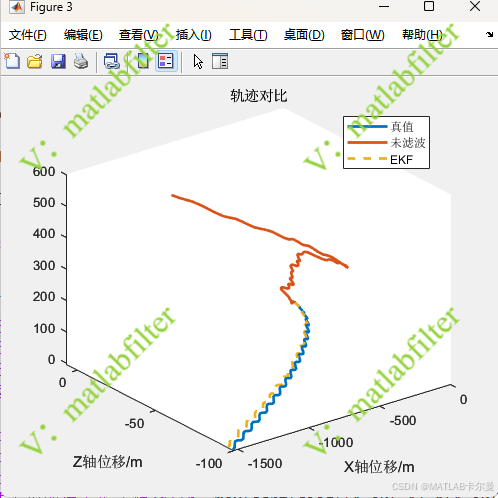
3.2 轨迹重构效果
通过对速度积分得到的位移轨迹更直观显示了融合算法的优势:
- INS积分轨迹(蓝色)呈现典型的发散特征
- EKF轨迹(红色)紧贴真实轨迹(黑色)
- 终点位置误差从12.3米(INS)降低到1.8米(EKF)
4. 工程实践要点
4.1 参数调优经验
在实际项目中,Q和R矩阵的确定至关重要:
- Q矩阵反映INS误差特性:
- 通常通过Allan方差分析确定惯性器件噪声参数
- 对于战术级IMU,Q的对角线元素一般在0.01-1 m²/s³范围
- R矩阵取决于DVL性能:
- 主流300kHz DVL的速度精度约0.2%±0.001m/s
- 在代码中R=0.1²的设置对应1σ误差0.1m/s
调试技巧:可以先设置R为DVL标称精度,然后调整Q使滤波效果最优。过大的Q会导致滤波结果波动,过小则修正效果不足。
4.2 常见问题排查
- 发散问题:
- 检查Q/R矩阵是否正定
- 验证观测方程是否与物理实际相符
- 确认时间同步精度(INS与DVL时间戳对齐)
- 振荡问题:
- 适当增大R矩阵元素
- 考虑改用自适应滤波调整Q/R
- 数值不稳定:
- 使用Joseph形式协方差更新
- 加入平方根滤波或UD分解算法
5. 代码扩展建议
这个基础框架可以进一步扩展:
- 增加姿态耦合:
matlab复制% 将状态扩展为6维:[vx,vy,vz,roll,pitch,yaw]
X = zeros(6,length(t));
- 添加自适应机制:
matlab复制% 根据新息协方差在线调整Q/R
S = H*P_pre*H' + R;
alpha = 0.1; % 遗忘因子
R = alpha*R + (1-alpha)*(Z(:,k)*Z(:,k)' - H*P_pre*H');
- 引入非线性的DVL观测模型:
matlab复制% 考虑安装角转换
C_bn = euler2dcm(roll,pitch,yaw);
Z_expected = C_bn * X(1:3,k);
6. 实际应用案例
在某型AUV的导航系统中,我们基于类似算法实现了INS/DVL紧组合:
- 硬件配置:
- 战术级光纤IMU (0.01°/h偏置稳定性)
- 600kHz多普勒测速仪
- 100Hz数据同步采集单元
- 性能指标:
- 4小时作业定位误差<航行距离0.3%
- 速度估计精度<0.03m/s (1σ)
- 抗DVL丢帧能力达30秒
- 关键改进:
- 增加了杆臂补偿算法
- 实现了基于运动状态的Q矩阵自适应
- 加入了故障检测与隔离机制
这个MATLAB程序虽然简化,但包含了最核心的算法逻辑。建议初学者先理解这个基础版本,再逐步扩展到更复杂的工程实现。完整代码可以从提供的链接下载,建议配合本文的分析一起研究。