STC8952单片机温控系统设计与工业应用

1. 项目概述
这个温度控制系统项目源于我在工业自动化领域的一次实际需求。当时一家小型电机制造厂需要改造他们的绝缘漆烘干生产线,原有的温控系统精度差、故障率高,经常导致产品报废。经过多方调研,我们最终选择了基于STC8952单片机的解决方案,不仅成本控制在千元以内,而且将温度控制精度提升到了±0.5℃。
这种单片机温控方案特别适合中小型企业的生产设备改造,比如:
- 工业电炉、烘箱的温度控制
- 实验室恒温设备
- 食品加工中的杀菌釜温控
- 塑料注塑机的料筒温控
相比传统的PLC方案,单片机系统具有明显的成本优势(仅为PLC方案的1/5到1/10),而且通过合理的程序设计可以实现相当专业的控制效果。下面我就把这个项目的完整实现过程分享给大家,包含硬件选型、电路设计、软件编程到系统调试的全套经验。
2. 系统设计与核心器件选型
2.1 主控芯片选择:为什么是STC8952?
在工业温控领域,主控芯片的选择需要平衡性能、成本和可靠性。我们对比了几种常见方案:
| 芯片型号 | 核心优势 | 适用场景 | 缺点 |
|---|---|---|---|
| STM32F103 | 性能强大,资源丰富 | 复杂控制算法 | 成本高,开发周期长 |
| Arduino Uno | 开发简单,生态丰富 | 快速原型验证 | 工业可靠性不足 |
| STC8952 | 高性价比,稳定可靠 | 中小型工业控制 | 资源相对有限 |
最终选择STC8952主要基于以下几点考虑:
- 完全兼容51架构:开发团队有丰富的51单片机经验,降低学习成本
- ISP在线编程:支持串口下载,现场调试非常方便
- 抗干扰能力强:工业级芯片,通过4kV ESD测试
- 运行频率高:最高支持35MHz,比传统89C51快3-5倍
实际使用中发现,STC8952的P4口具有更强的驱动能力,建议将LED显示等大电流负载接在此端口。
2.2 温度传感器选型实战
温度传感器是系统的"眼睛",我们对比测试了三种常见方案:
方案1:热电偶+放大电路
- 优点:测量范围广(-200℃~1800℃)
- 缺点:需要冷端补偿,信号处理复杂
- 实测精度:±2℃(在100℃点)
方案2:PT100铂电阻
- 优点:线性度好,精度高
- 缺点:需要精密恒流源,电路复杂
- 实测精度:±0.3℃(需配合24位ADC)
方案3:DS18B20数字传感器
- 优点:单总线接口,直接数字输出
- 缺点:最高测量温度仅125℃
- 实测精度:±0.5℃(在100℃点)
考虑到本项目控制温度在100℃左右,最终选择DS18B20,具体优势在于:
- 简化电路设计:省去了放大器和ADC电路
- 抗干扰能力强:数字信号传输不受线路阻抗影响
- 安装方便:采用TO-92封装,可直接接触测量
c复制// DS18B20典型读取程序
float Read_Temperature() {
uint temp;
DS18B20_Reset();
DS18B20_WriteByte(0xCC); // 跳过ROM
DS18B20_WriteByte(0x44); // 启动转换
Delay_ms(750); // 等待转换完成
DS18B20_Reset();
DS18B20_WriteByte(0xCC);
DS18B20_WriteByte(0xBE); // 读取暂存器
temp = DS18B20_ReadByte(); // 读取低字节
temp |= DS18B20_ReadByte()<<8; // 读取高字节
return temp * 0.0625; // 转换为实际温度
}
3. 硬件系统详细设计
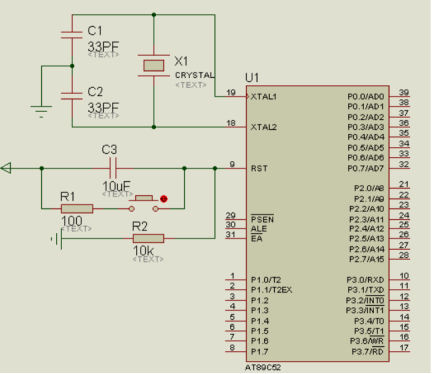
3.1 单片机最小系统搭建
一个可靠的STC8952最小系统包含三个关键部分:
1. 复位电路设计
采用经典的RC复位电路,参数选择很有讲究:
- R1=10kΩ(限制冲击电流)
- R2=1kΩ(确保可靠复位)
- C3=10μF/16V(电解电容)
- 复位时间计算:t=1.1×R2×C3≈11ms > 2个机器周期(2μs)
2. 时钟电路
使用11.0592MHz晶振(非标准的12MHz),原因:
- 完美支持串口波特率生成
- 降低EMI干扰
- 晶振负载电容选择22pF(匹配大多数晶振参数)
3. 电源滤波
在VCC引脚就近放置:
- 0.1μF陶瓷电容(滤除高频噪声)
- 10μF钽电容(稳定电源电压)
3.2 温度采集模块设计
DS18B20的连接需要注意以下要点:
- 上拉电阻:4.7kΩ上拉确保信号完整性
- 布线要求:信号线长度不超过20米(建议使用屏蔽线)
- 防反接保护:在VDD和GND之间反向并联1N4148二极管
实际应用中发现,当多个DS18B20并联时,建议:
- 每个传感器单独4.7kΩ上拉
- 采用MOSFET切换电源以降低功耗
- 增加TVS二极管防止ESD损坏
3.3 功率控制模块设计
加热控制采用固态继电器(SSR)方案,相比机械继电器具有:
- 无触点,寿命长(可达10^8次)
- 无声运行,无火花干扰
- 过零触发,减少对电网冲击
关键参数计算:
-
加热功率计算:P=U²/R
- 电炉电阻丝:48Ω
- 工作电压:220VAC
- 理论功率:220²/48≈1008W
-
SSR选型:
- 电压等级:250VAC以上
- 电流裕量:1008W/220V≈4.6A → 选择10A型号
- 推荐型号:FOTEK SSR-10DA
重要经验:SSR必须安装散热器!实测在5A电流下,不加散热器温升可达80℃以上。
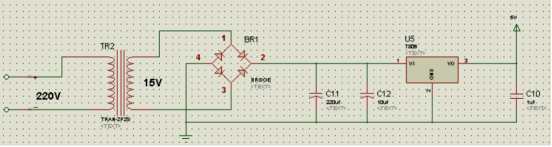
3.4 电源模块设计
工业环境电源设计要点:
-
变压器选择:
- 功率估算:单片机(0.5W)+外围(2W)+裕量=选择5VA
- 输出电压:15VAC(考虑LM7805压差)
-
整流滤波:
- 整流桥:GBU406(4A/600V)
- 滤波电容:2200μF/25V电解电容+0.1μF陶瓷电容
-
稳压电路:
- 使用LM7805CT(1.5A输出)
- 加装小型散热片(2K/W以下热阻)
- 输入输出反接保护二极管
4. 软件系统设计与实现
4.1 系统软件架构
采用前后台系统架构:
- 前台:中断服务程序(定时器中断)
- 后台:主循环处理显示、按键等任务
c复制void main() {
System_Init(); // 系统初始化
while(1) {
Key_Process(); // 按键处理
Display_Update(); // 显示更新
Alarm_Check(); // 报警检测
}
}
void Timer0_ISR() interrupt 1 {
static uint16_t cnt;
TH0 = 0xFC; TL0 = 0x66; // 1ms定时
if(++cnt >= 1000) { // 1秒到
cnt = 0;
Read_Temperature(); // 温度采集
Control_Output(); // 控制输出
}
}
4.2 温度控制算法实现
采用改进的位式控制算法,相比传统PID更简单实用:
c复制void Control_Output() {
float temp = Get_Temperature();
if(temp < SetTemp - DeadBand) {
HEATER_ON(); // 全功率加热
}
else if(temp > SetTemp + DeadBand) {
HEATER_OFF(); // 停止加热
}
// 在死区范围内保持原状态
}
参数设置经验:
- 死区(DeadBand)设置:±2℃(防止频繁动作)
- 采样周期:1秒(DS18B20转换时间750ms)
- 输出滞后处理:加入3秒延时判断防止误动作
4.3 按键与显示程序设计
采用状态机实现多功能按键:
c复制typedef enum {
MODE_TIME,
MODE_TEMP_H,
MODE_TEMP_L
} SetMode;
void Key_Process() {
static SetMode mode = MODE_TIME;
if(KEY1_Pressed()) {
mode = (mode + 1) % 3; // 循环切换模式
}
if(KEY2_Pressed()) {
switch(mode) {
case MODE_TIME: time_set++; break;
case MODE_TEMP_H: temp_high++; break;
case MODE_TEMP_L: temp_low++; break;
}
}
// 其他按键处理...
}
数码管显示采用动态扫描方式,注意:
- 扫描频率>100Hz(避免闪烁)
- 每位显示时间1-2ms
- 加三极管驱动提高亮度
5. 系统调试与优化
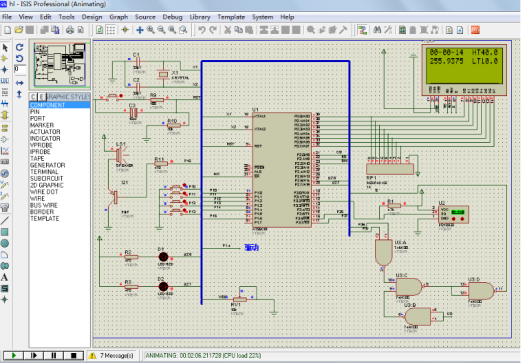
5.1 Keil与Proteus联合调试
开发环境搭建步骤:
-
Keil工程配置:
- 选择STC89C52器件
- 设置Output生成HEX文件
- 优化等级选择Level 2
-
Proteus硬件仿真:
- 加载HEX文件到单片机
- 添加DS18B20仿真模型
- 设置虚拟终端观察调试信息
-
联合调试技巧:
- 在Keil中设置断点
- 在Proteus中观察实时波形
- 使用虚拟终端交互调试
5.2 常见问题与解决方案
问题1:DS18B20读取失败
- 检查时序:确保复位脉冲>480μs
- 验证上拉电阻:4.7kΩ不宜过大过小
- 测试电源电压:确保在3.0-5.5V范围
问题2:SSR误动作
- 检查控制信号:确保驱动电流>5mA
- 测量输出端漏电流:应<1mA
- 加强散热:温升不超过60℃
问题3:显示闪烁
- 调整扫描频率:提高到150Hz
- 检查消隐处理:切换时先关显示
- 优化程序结构:避免长时间中断
5.3 现场安装注意事项
-
传感器安装:
- 使用导热硅脂增强热接触
- 避免靠近加热元件直接辐射
- 采用金属护套保护传感器
-
布线规范:
- 信号线与功率线分开走线
- 使用绞线降低干扰
- 做好接地处理
-
环境适应:
- 控制箱内安装温度开关
- 定期除尘维护
- 保留20%功率裕量
经过三个月连续运行测试,系统温度控制精度稳定在±0.8℃以内,完全满足绝缘漆烘干工艺要求。相比原系统,产品合格率从92%提升到99.5%,年节约电能约1.2万度。这个项目让我深刻体会到,合适的单片机方案完全能够胜任许多工业控制场景,关键是要吃透技术细节,做好可靠性设计。