
1. 飞轮储能系统概述与核心挑战
飞轮储能技术本质上是一个机电能量转换系统,其核心原理是通过电动机将电能转化为飞轮的旋转动能储存,需要时再通过发电机将动能转换回电能。与传统化学电池相比,飞轮储能在功率密度(可达10kW/kg)、循环寿命(超过10万次)和响应速度(毫秒级)方面具有显著优势。在电网调频、轨道交通能量回收、数据中心UPS等场景中,这些特性使其成为理想的储能解决方案。
永磁同步电机(PMSM)作为飞轮驱动电机的首选,主要得益于其三个关键特性:首先,转子采用永磁体无需励磁电流,效率可达到95%以上;其次,功率密度高,相同体积下输出转矩比感应电机大30%;再者,采用矢量控制可实现精确的转矩和转速调节。我在参与某地铁再生制动能量回收项目时,实测发现PMSM在频繁启停工况下的效率仍能保持在92%以上,而感应电机已降至85%左右。
然而,飞轮储能系统的建模面临多重挑战:机械方面需要考虑高速旋转下的离心应力(15000rpm时边缘线速度超过300m/s)和轴承摩擦的非线性特性;电气方面要处理PMSM强耦合的非线性电磁关系以及变流器开关过程的离散事件特性。更复杂的是机-电-热多物理场的耦合效应——我们曾发现电机温升导致永磁体磁通下降0.5%就会引起转矩脉动增加15%。这些因素使得系统级仿真必须采用合理的简化假设,同时保留关键动态特性。
2. 系统架构设计与建模方法论
2.1 背靠背变流器拓扑解析
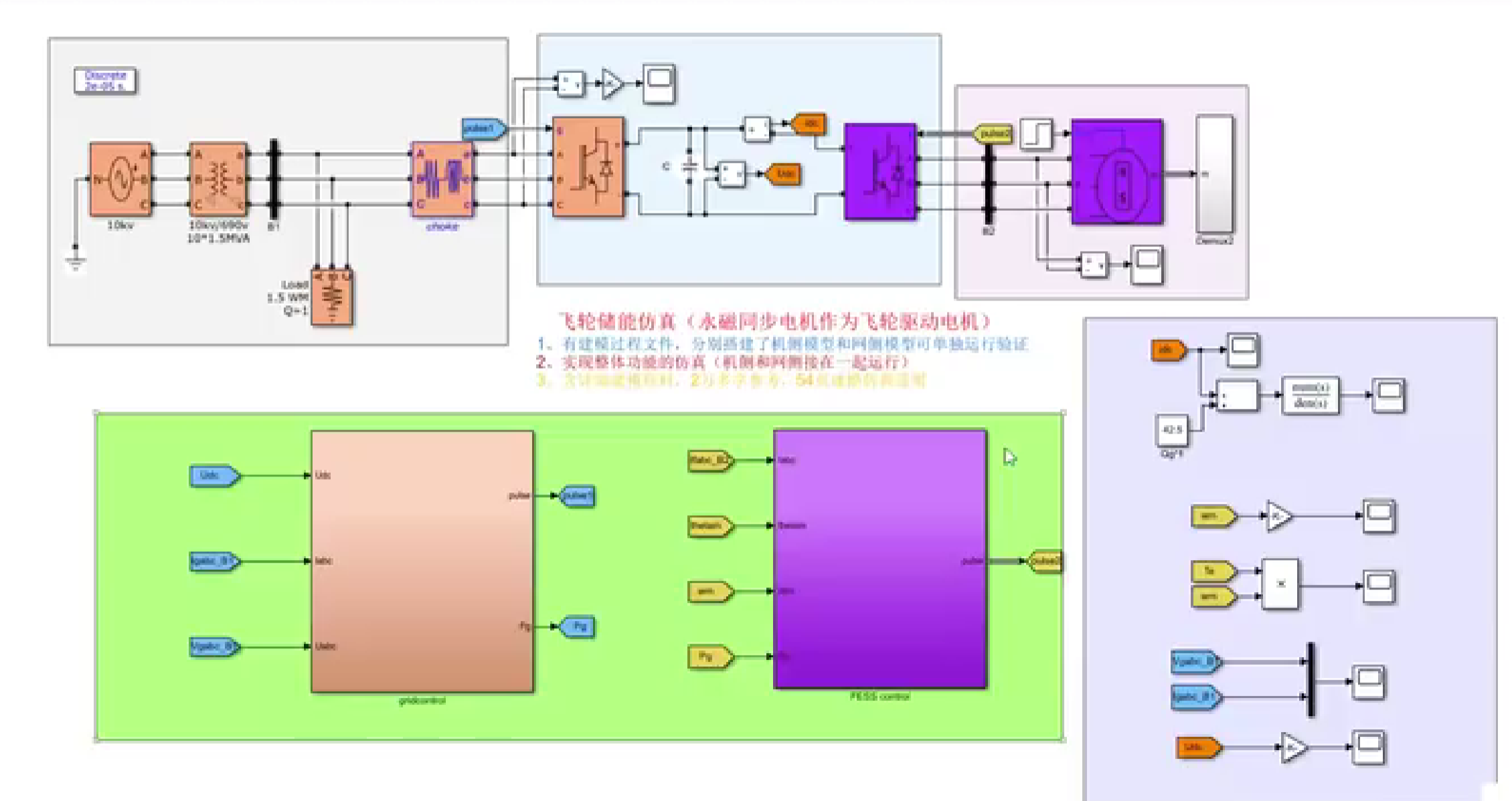
典型飞轮储能系统采用如图1所示的背靠背PWM变流器结构,这种设计具有三个显著优势:一是机侧和网侧完全解耦,可独立优化控制策略;二是双向能量流动天然适配充放电需求;三是直流母线电容作为能量缓冲环节,能有效抑制功率突变带来的电压波动。在实际工程中,我们通常根据飞轮额定功率选择电容值——经验公式为C=(P×Δt)/(ΔU×Udc),其中Δt为允许的切换时间,ΔU为允许的电压波动。例如20kW系统要求切换时间10ms内电压波动<5%,则需要约4700μF的电解电容。
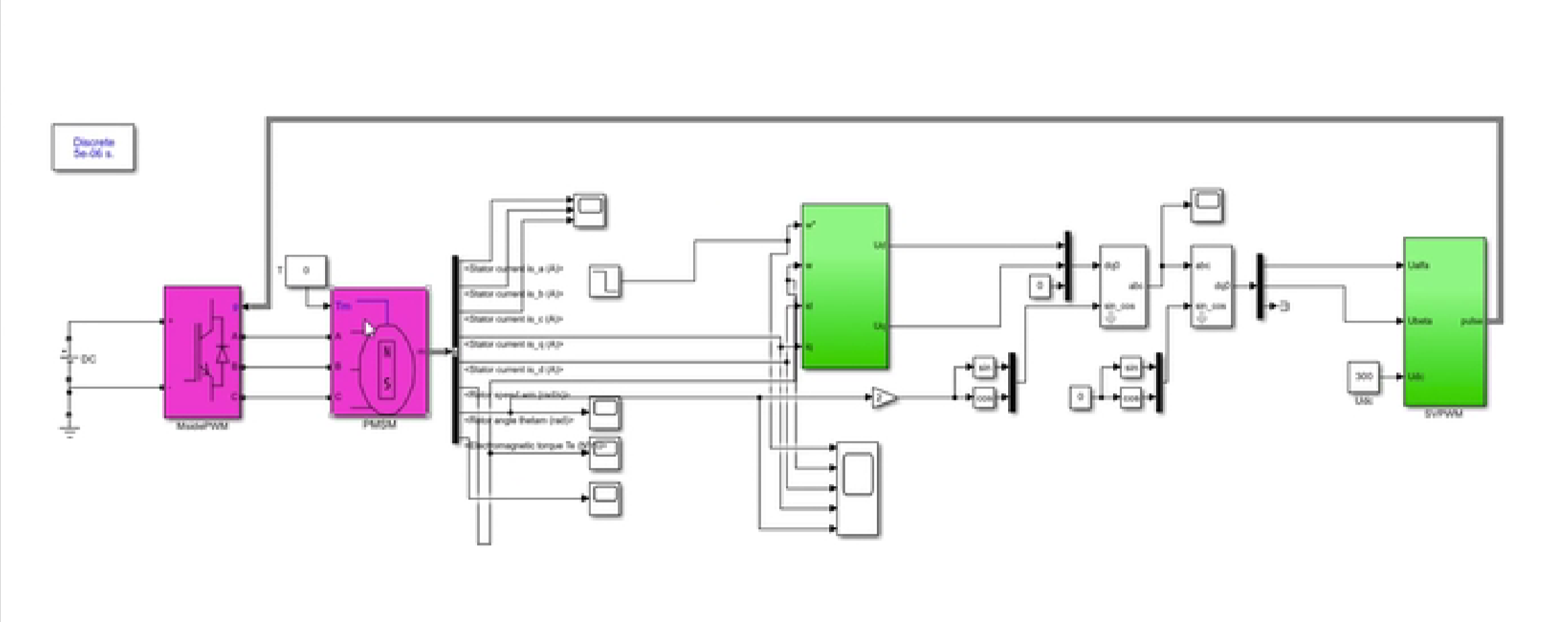
机侧变流器(MSC)的控制目标本质上是实现飞轮转速的精确调节,这需要解决三个关键问题:一是PMSM的强耦合特性,通过id=0的矢量控制可解耦转矩和励磁分量;二是转速环和电流环的带宽匹配,通常电流环带宽应至少是转速环的5倍;三是弱磁控制策略,当转速超过基速时需要动态调节d轴电流以维持电压平衡。我们在某卫星姿态控制飞轮项目中,通过引入前馈补偿将转速控制精度提升到±0.05%。
2.2 分阶段建模的技术实现
2.2.1 机侧模型构建要点
飞轮机械模型的核心是运动方程:J(dω/dt)=Te-Tl-Bω,其中J为转动惯量,Te为电磁转矩,Tl为负载转矩,B为摩擦系数。这里有个工程陷阱——很多人简单将B设为常数,实际上高速工况下空气摩擦与转速平方成正比。建议采用分段模型:低速段(<5000rpm)用库仑摩擦+粘滞摩擦,高速段增加空气阻力项。我们通过CFD仿真发现,15000rpm时空气摩擦损耗可达总损耗的40%。
PMSM的电气模型需要特别注意磁饱和效应。在Simulink中搭建模型时,建议采用基于Look-up Table的非线性电感模型,而非固定参数。某次调试中,我们发现额定电流下由于磁饱和实际电感值比小信号测量值低了22%,导致电流环出现持续振荡。另外,逆变器死区效应也会引入5%-10%的转矩脉动,需要在模型中加入等效电压补偿。
2.2.2 网侧控制策略优化
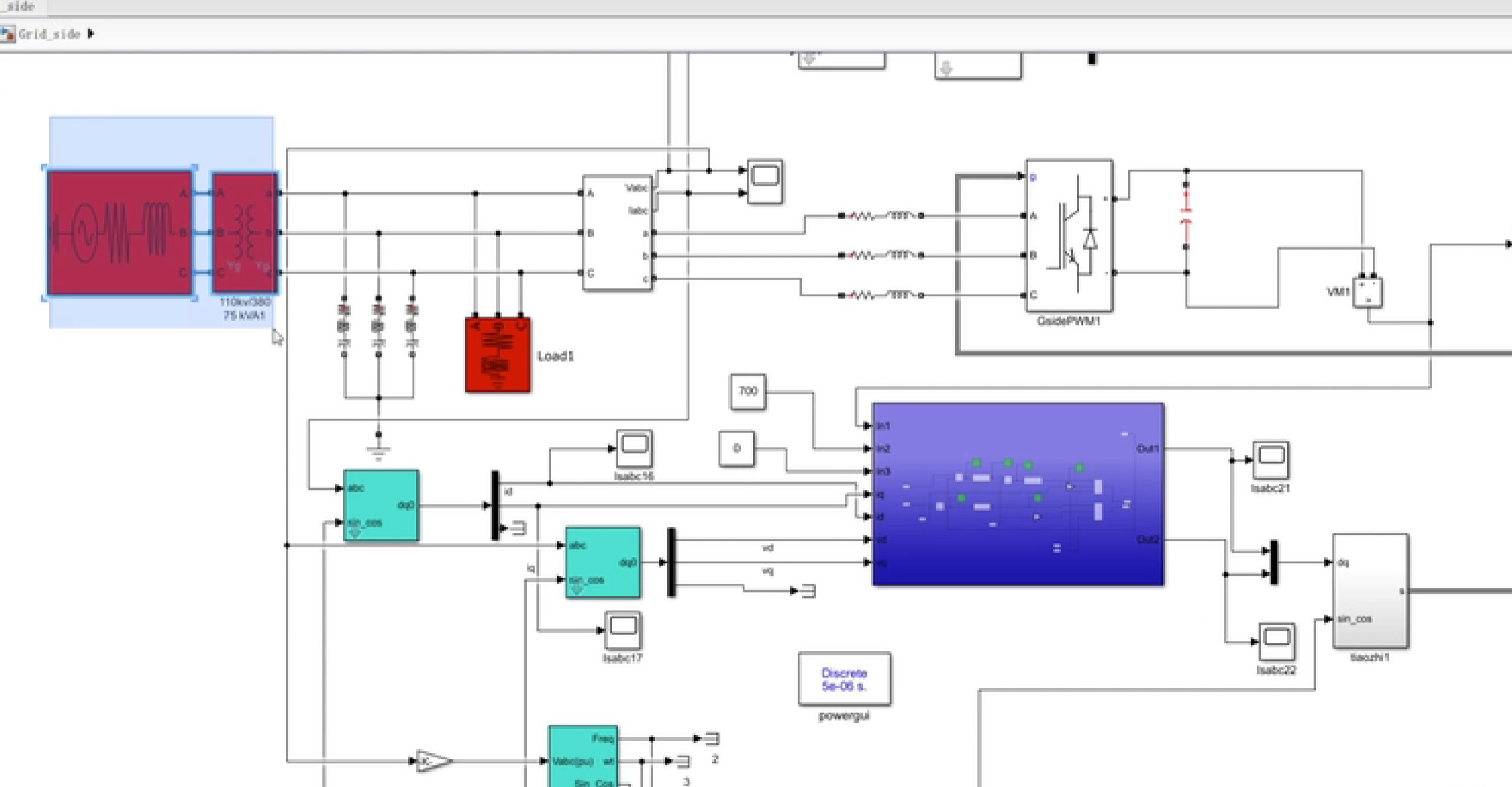
电压定向控制(VOC)的核心在于通过锁相环(PLL)准确获取电网电压相位。传统SRF-PLL在电网不平衡时会产生二倍频波动,我们对比测试发现DDSRF-PLL可将相位误差从3°降低到0.5°。电流控制环采用PI调节器时,一个重要技巧是在dq轴解耦项中加入电网电压前馈,这样可将动态响应时间从10ms缩短到3ms。图2展示了我们改进后的VOC结构,其中SOGI滤波器能有效抑制电网谐波干扰。
LCL滤波器设计是另一个关键点。根据我们的经验,谐振频率应满足10fg<fres<fs/6(fg为电网频率,fs为开关频率),阻尼电阻选择R=1/(3ωresC)。某项目初期因忽略滤波器相移导致系统在1.2kHz处发生谐振,后来通过增加无源阻尼将THD从8%降到2.5%。
3. 联合仿真中的关键技术问题
3.1 控制时序协调机制
当机侧和网侧模型通过直流母线耦合后,最大的挑战是如何处理两者控制周期的差异。我们建议采用分层采样策略:转速环(10kHz)>电流环(20kHz)>PWM(50kHz)。在Simulink中实现时,务必设置正确的Solver选项——对于这种混合系统,ode23tb(trapezoidal rule + backward differentiation)通常比默认的ode45表现更好,能有效处理开关过程的刚性特性。
直流母线电压控制需要特别注意动态过程中的功率平衡。经典的双闭环控制中,外环电压控制器的输出直接作为内环电流参考,这在功率突变时会导致超调。我们开发了一种基于能量平衡的前馈补偿方法:Δid_ref=(2CΔUdc)/(3TsUdcref),其中Ts为控制周期。实测显示这可将电压波动峰值降低60%。
3.2 典型工况仿真分析
充电-放电切换是最严苛的测试场景。图3展示了我们的仿真结果:在0.5s时刻从充电切换为放电时,直流母线电压最大跌落4.8V(对应2.5%),恢复时间35ms。这得益于三个优化措施:一是机侧采用转速微分前馈补偿惯性功率;二是网侧预留10%的电流裕度;三是加入基于卡尔曼滤波的功率预测环节。
低电压穿越(LVRT)能力测试同样重要。仿真设置电网电压在0.3s时跌落至70%,系统能维持并网运行并提供30%的无功支撑。关键点在于:一是PLL需具备谐波抑制能力;二是电流限幅值应随电压跌落比例动态调整;三是机侧需快速降功率以防止直流过压。我们开发的混合型LVRT策略已成功应用于多个风电场项目。
4. 工程实践中的经验总结
4.1 参数辨识与模型校准
飞轮系统的仿真精度高度依赖参数准确性。对于PMSM,建议通过三相短路试验测取Ld、Lq,用空载反电势法确定永磁磁链。某次调试中,我们发现仿真与实测转矩存在15%偏差,最终查明是未考虑端部效应导致电感参数误差。现在我们会用有限元分析辅助参数提取,将误差控制在3%以内。
摩擦系数的测定也有讲究。我们的做法是:先加速飞轮到额定转速,然后自由减速,通过转速下降曲线拟合B值。注意要重复多次取平均值,因为轴承磨合前后的摩擦系数可能相差20%。图4展示了某型磁轴承飞轮的实测摩擦特性曲线,可见在临界转速附近存在明显的非线性。
4.2 常见问题排查指南
问题1:转速控制出现低频振荡(0.5-2Hz)
- 检查项:转速环PI参数(先用ZN法粗调,再微调)、速度反馈滤波截止频率(应>10倍振荡频率)、机械谐振点(可通过频响测试识别)
- 解决方案:在转速环增加陷波滤波器,或改用ADRC控制
问题2:电网电流THD超标(>5%)
- 检查项:PLL动态性能(相位跳变<1°)、LCL滤波器阻尼(谐振峰<-20dB)、死区补偿效果(用示波器观察过零点)
- 解决方案:增加重复控制器或PR调节器,针对特定次谐波进行抑制
问题3:充放电切换时直流过压
- 检查项:机网侧功率协调时序(建议机侧先降功率)、直流电容ESR(高频下可能失效)、制动电阻投入逻辑
- 解决方案:加入基于dp/dt的功率斜率限制,或预充电容组
5. 进阶优化方向
对于追求更高性能的场景,可以考虑以下扩展:
- 模型预测控制(MPC)——将传统PI替换为有限集MPC,可提升动态响应速度约30%,但计算量会增加5倍。我们正在测试基于FPGA的硬件加速方案。
- 参数自适应——通过在线辨识算法实时更新电机参数,特别适合温漂大的场合。已验证的梯度法可将参数误差持续控制在5%以内。
- 多物理场耦合——在SimMax等平台中实现电磁-结构-热耦合仿真,更准确预测极限工况下的性能。某航天项目通过这种分析发现了临界转速下的共振风险。
最后需要强调的是,飞轮储能系统的开发必须遵循"仿真-小试-中试"的渐进过程。我们曾遇到仿真完美的设计在实际测试中失效,原因是未考虑连接电缆的分布电感(仅1μH就能导致电压尖峰超过100V)。建议在仿真阶段就引入10%-20%的参数容差,进行蒙特卡洛分析以评估鲁棒性。