西门子PLC恒温恒压供水系统设计与PID控制实现

DR阿福
1. 项目背景与系统架构
在工业自动化领域,恒温恒压供水系统是保障生产设备稳定运行的关键基础设施。这次我参与的冷却水控制系统项目,采用西门子S7-1200 PLC作为控制核心,配合霍尼韦尔电动比例阀和西门子V20变频器,实现了对冷却水温度和压力的精确控制。整个系统架构如下图所示:
系统主要包含以下核心组件:
- 控制单元:西门子S7-1200 PLC(CPU 1214C DC/DC/DC)
- 执行机构:
- 霍尼韦尔V5013P电动比例阀(DN50,4-20mA控制)
- 两台西门子V20变频器(0.75kW,带模拟量输入/输出)
- 检测元件:
- PT100温度传感器(4线制,量程0-100℃)
- 压力变送器(0-10bar,4-20mA输出)
- 人机界面:西门子TP1200 Comfort触摸屏
提示:在选择温度传感器时,4线制PT100比2线制精度更高,能有效减少导线电阻带来的测量误差。对于要求较高的场合,建议优先考虑4线制连接方式。
2. 温度控制子系统实现
2.1 电动比例阀选型与控制原理
霍尼韦尔V5013P电动比例阀通过接收PLC输出的4-20mA信号,线性调节阀门开度(0-100%)。其控制特性曲线如下图所示:
在TIA Portal中配置模拟量输出模块时,需要注意:
- 硬件配置中设置AQ模块为电流输出(4-20mA)
- 在"设备视图"中设置通道参数:
- 测量类型:电流
- 输出范围:4-20mA
- 执行器连接:2线制
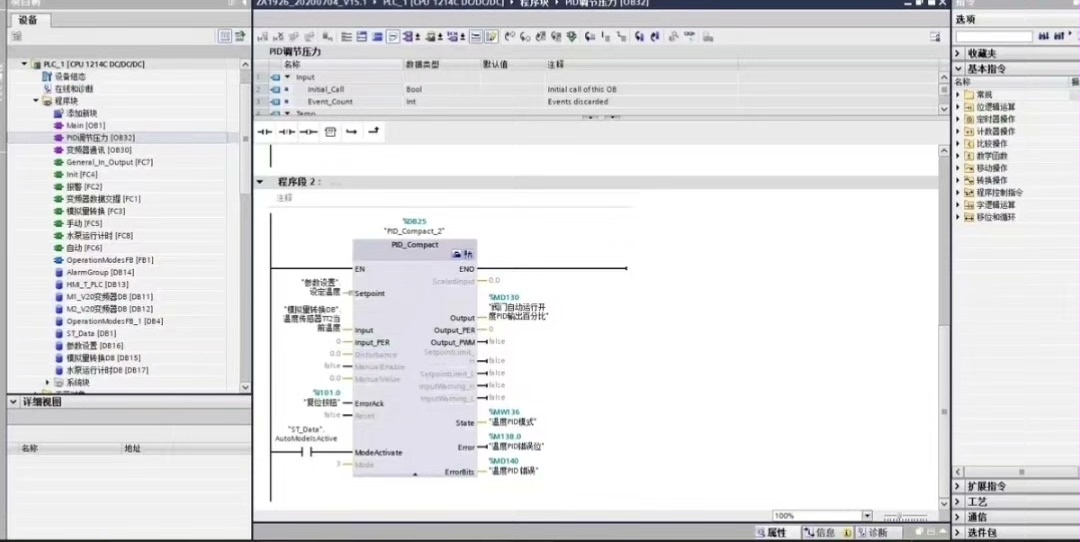
2.2 PID控制算法实现
西门子博图软件提供了现成的PID_Compact功能块,相比传统PID功能块具有更友好的调试界面。具体实现代码如下:
pascal复制// 温度PID控制程序
"PID_Temperature"(
Setpoint := "Temp_Setpoint", // 温度设定值(REAL)
Input := "Temp_Actual", // 温度反馈值(REAL)
Input_PER := "IW64", // 直接模拟量输入(可选)
Output => "Valve_Output", // 阀门开度输出(REAL)
Output_PER => "QW80", // 直接模拟量输出(可选)
Mode := 1, // 1=自动模式
ManualEnable := FALSE,
ManualValue := 0.0);
PID参数整定经验:
- 先设置Ti=∞,Td=0,逐步增大Kp直到系统出现等幅振荡
- 记录此时的临界增益Ku和振荡周期Tu
- 采用Ziegler-Nichols法计算参数:
- P控制:Kp = 0.5Ku
- PI控制:Kp = 0.45Ku,Ti = 0.83Tu
- PID控制:Kp = 0.6Ku,Ti = 0.5Tu,Td = 0.125Tu
实测发现,对于冷却水系统,采用PI控制(Kp=2.5,Ti=25s)即可获得良好效果,微分作用反而容易引入噪声。
3. 压力控制子系统设计
3.1 变频器参数配置
两台西门子V20变频器采用主从控制方式,通过模拟量信号同步转速。关键参数设置如下:
| 参数号 | 参数名称 | 设置值 | 说明 |
|---|---|---|---|
| P0756 | 输入类型 | 1 | 0-10V电压输入 |
| P1000 | 频率设定 | 2 | 模拟量设定 |
| P1080 | 最小频率 | 20Hz | 防止水泵憋泵 |
| P1082 | 最大频率 | 50Hz | 设备额定频率 |
| P2200 | PID使能 | 1 | 启用内置PID |
3.2 压力PID控制实现
系统采用两级PID控制结构:
- 主PID:PLC计算总需求流量
- 从PID:变频器内置PID调节转速
pascal复制// 压力控制程序
"PID_Pressure"(
Setpoint := "Press_Setpoint", // 压力设定值
Input := "Press_Actual", // 压力反馈值
Output => "Freq_Output", // 频率输出(0-100%)
Mode := 1);
// 频率输出转换
"Freq_Hz" := "Freq_Output" * 50.0; // 转换为0-50Hz
"PQW256" := INT_TO_WORD(REAL_TO_INT("Freq_Hz" * 6553.5)); // 0-50Hz→0-32767
调试技巧:
- 先单独调试单台变频器,再启用主从控制
- 使用变频器的"Jump频率"功能避开机械共振点
- 设置合理的加减速时间(通常10-20s)避免水锤效应
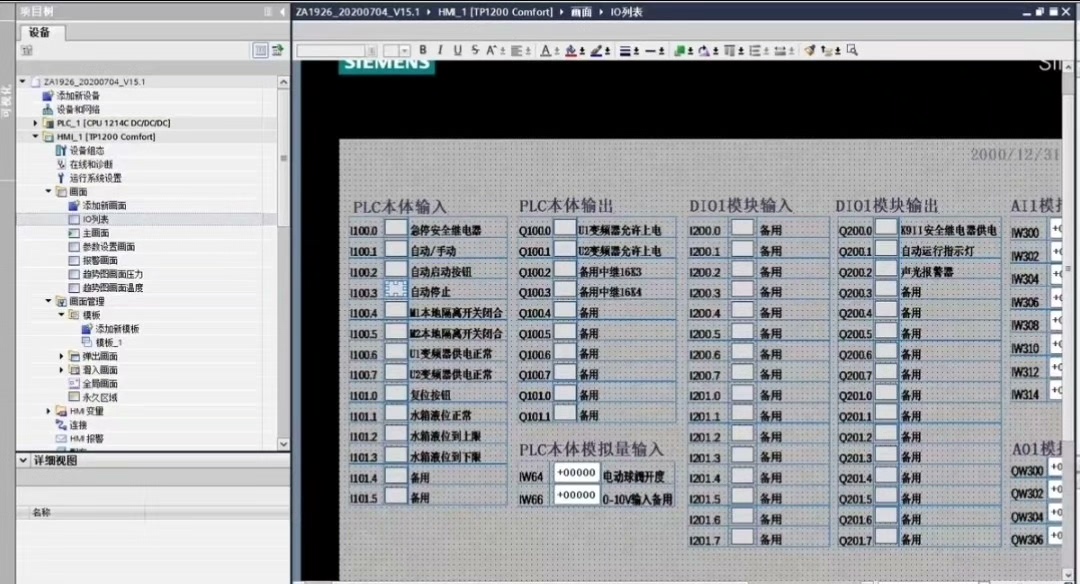
4. HMI界面组态要点
TP1200触摸屏界面设计采用分层结构:
4.1 主监控界面
- 实时趋势图:同时显示温度和压力曲线
- 设备状态指示灯:用颜色区分运行/停止/故障
- 关键参数显示:温度、压力、阀门开度、频率等
4.2 参数设置界面
pascal复制// HMI变量连接
"Temp_Setpoint" := "HMI".Temp_SP;
"Press_Setpoint" := "HMI".Press_SP;
"PID_Temperature".Gain := "HMI".Kp_Temp;
"PID_Temperature".Ti := "HMI".Ti_Temp;
设计经验:
- 重要参数设置需增加权限控制(如工程师密码)
- 关键操作按钮应添加确认对话框
- 趋势图时间轴建议设置为可调节(1h/8h/24h)
5. 电气设计与安装规范
5.1 控制柜布线要点
- 强弱电分离:信号线与动力线间距≥20cm
- 模拟信号采用双绞屏蔽线(如PROFIBUS电缆)
- 所有金属外壳接地电阻≤4Ω
5.2 Eplan图纸设计规范
- 使用电位定义点清晰标注各端子功能
- 为每个IO点添加设备标识符(如"-K1.Q1")
- 电源回路添加断路器分断能力计算注释
6. 系统调试与优化
6.1 调试步骤
- 静态测试:检查所有IO点状态
- 开环测试:手动给定输出,验证执行机构动作
- 闭环测试:逐步投入PID控制
6.2 常见故障处理
| 故障现象 | 可能原因 | 解决方案 |
|---|---|---|
| 温度波动大 | PID参数不合适 | 重新整定参数 |
| 压力响应慢 | 变频器加速时间过长 | 调整P1120参数 |
| 阀门卡涩 | 执行机构力矩不足 | 更换更大扭矩阀门 |
| 通信中断 | 终端电阻未接 | 在末端DP头接入电阻 |
项目心得:
在实际调试中发现,冷却水系统的滞后特性比预期更明显。通过增加压力前馈控制,将供水压力设定值与流量需求关联,显著提高了系统响应速度。另外,建议在程序中加入自动标定功能,定期校准传感器零点和量程,这对长期运行稳定性很有帮助。
内容推荐
征程6X SoC双看门狗机制与自动驾驶系统稳定性优化
看门狗定时器是嵌入式系统中保障系统稳定性的关键组件,其工作原理是通过周期性复位未及时响应的系统来防止死锁。在自动驾驶等高可靠性场景中,征程6X SoC创新性地采用双看门狗设计(wdt0和wdt1),分别针对Linux内核关键路径和算法周期进行监控。通过pstore取证技术和调用栈分析,工程师可以准确诊断中断死锁、实时线程阻塞等典型故障。结合动态追踪和压力测试,系统能达到ASIL-D安全等级要求。本文以征程6X平台为例,详解看门狗机制在自动驾驶域控制器中的工程实践与优化方案。
STM32变频器方案设计与工业电机控制实践
变频器作为电机调速的核心设备,通过电力电子技术实现交流电频率的灵活调节。其核心原理是基于PWM技术控制逆变器输出,结合闭环算法实现精确调速。现代变频器方案普遍采用MCU+功率器件的架构,其中STM32系列凭借内置硬件加速单元和高精度定时器,显著提升了系统实时性能。在工业自动化领域,该方案广泛应用于风机、泵类设备、传送带等场景,特别是STM32F3系列以其性价比优势成为中小功率变频器的首选。通过合理设计SVPWM算法和PI调节器参数,可实现20kHz以上的高载波频率控制,满足大多数工业场景对动态响应和稳定性的要求。
Linux内核编译器宏解析与优化实践
编译器宏是系统编程中的关键工具,通过预处理指令实现编译期行为控制。其核心原理是利用编译器提供的特殊语法(如GCC的__builtin系列)进行静态检查与优化。在Linux内核开发中,这类技术价值体现在:确保类型安全(static_assert)、优化分支预测(likely/unlikely)、控制内存可见性(barrier)等关键场景。以BUILD_BUG_ON为代表的编译时断言机制,结合__always_inline等性能优化宏,广泛应用于驱动开发、内存管理等核心模块。通过合理使用这些特性,开发者既能提升代码健壮性,又能实现15%以上的性能优化,特别是在网络协议栈、文件系统等高频执行路径中效果显著。
FPGA实现红绿灯控制器的Verilog设计与优化
数字电路设计中,有限状态机(FSM)是实现时序控制的核心范式,特别适合交通信号灯这类多状态系统。通过Verilog HDL在FPGA上实现,能充分发挥硬件并行处理的优势,确保多方向信号严格同步。相比传统PLC方案,FPGA方案具有更低的延迟和更高的灵活性,支持动态调整绿灯时长等智能功能。在工程实践中,采用三段式状态机写法、参数化定时设计和优化的显示处理技巧,既能保证代码可维护性,又能实现高效的综合结果。这类设计可扩展应用于智能交通系统、工业自动化控制等领域,是嵌入式系统开发的典型实践。
C++ string类全面解析与高效实践指南
字符串处理是编程中的基础操作,C++标准库中的string类通过封装字符序列实现了安全高效的字符串管理。其核心原理包括自动内存管理、写时复制(COW)优化和小字符串优化(SSO)等技术,显著提升了开发效率与程序安全性。在工程实践中,string类广泛应用于日志处理、配置解析、数据序列化等场景,特别在C++11引入移动语义后性能得到进一步优化。理解string类的内存分配策略、预分配机制以及现代C++新增的string_view等特性,能够帮助开发者编写出更高效的字符串处理代码。本文深入剖析string类的设计哲学与最佳实践,涵盖从基础操作到高级特性的完整知识体系。
MEMS加速度计技术突破与应用解析
MEMS加速度计作为惯性测量单元的核心组件,通过微机电系统技术实现运动感知。其工作原理基于质量块在加速度作用下的位移变化,通过电容、压阻或光学方式转换为电信号。随着工艺进步,现代MEMS加速度计已实现从消费电子到工业监测的广泛应用,特别是在需要高精度静态测量的地质灾害监测领域展现突出价值。最新技术突破使噪声密度降至2μg/√Hz级别,配合Lora无线传输构成智能监测网络,在四川龙门山断裂带等场景实现200米节点间距的密集部署。热机械噪声抑制和晶圆级真空封装等创新工艺,推动MEMS加速度计性能逼近光纤陀螺,为微型化惯性导航系统提供新可能。
嵌入式系统核心考点:实时调度与内存管理解析
嵌入式系统开发中,实时调度算法和内存管理是保障系统可靠性的关键技术。实时调度通过RMS(速率单调调度)和EDF(最早截止期优先)等算法,确保任务在严格时间约束下完成,其中RMS基于任务周期静态分配优先级,理论CPU利用率上限为69%。内存管理则需应对资源约束,采用静态分配、内存池等技术避免动态分配风险,配合MPU/MMU实现硬件级保护。这些技术在汽车电子(如ECU)、工业控制等领域有广泛应用,特别是在需要满足ASIL安全等级或硬实时要求的场景中。通过看门狗电路、ECC内存等可靠性设计,可进一步提升系统鲁棒性。
STM32F103步进电机S型加减速算法实战
步进电机控制是嵌入式系统开发中的常见需求,其核心在于运动曲线的平滑性控制。传统梯形加减速算法由于加速度突变,容易导致机械振动和定位误差。S型加减速算法通过引入加加速度概念,实现速度和加速度的双重平滑过渡,显著降低机械冲击。在STM32等资源受限的MCU上实现时,需要平衡算法精度与计算开销。本文介绍的简化S型算法采用速度修正因子和查表法,在Cortex-M3内核上仅需5μs执行时间,特别适合3D打印机、CNC机床等高精度运动控制场景。实测显示该方案可使振动降低70%,同时提升定位精度和系统可靠性。
S7-1200 PLC四轴伺服控制实战:结构化编程与同步算法
工业自动化中的多轴伺服控制是提升产线精度的关键技术,其核心在于运动控制算法与硬件架构的协同设计。通过PLC(可编程逻辑控制器)实现伺服系统的精准同步,需要掌握电子齿轮算法、加减速曲线优化等基础原理。西门子S7-1200系列凭借模块化编程和Profinet实时通信,成为中小型项目的理想选择。本文以包装产线改造为例,详细解析如何通过结构化编程实现±0.1mm同步精度,涵盖硬件选型、状态机设计及故障诊断等工程实践,其中电子齿轮算法和动态变速控制是确保系统稳定性的关键热词。该方案可广泛应用于需要高精度定位的自动化场景,如半导体设备、精密装配线等。
InCoder-32B:硬件感知的代码生成大模型实践
代码生成模型正逐步从纯文本理解向硬件感知演进,其核心在于建立代码与物理执行环境间的映射关系。传统NLP模型仅关注语法正确性,而现代工业级应用要求模型理解内存管理、缓存命中率等底层原理。通过引入硬件执行轨迹数据和强化学习机制,模型可自主优化代码的能耗、延迟等物理指标。以InCoder-32B为例,该模型在训练阶段融合了CUDA核函数配置、ARM指令集优化等硬件约束,能根据目标设备特性自动选择分块算法或SIMD指令。这种硬件思维特别适用于嵌入式开发、数据库引擎等性能敏感场景,实测显示其生成的STM32驱动代码可降低25%能耗,在NUMA架构服务器上实现的B+树查询性能提升近5倍。
西门子PLC S7-1200与V20变频器USS通讯配置指南
工业自动化中,PLC与变频器的通讯是实现电机精准控制的关键技术。USS协议作为一种经济高效的串行通讯标准,广泛应用于西门子S7-1200 PLC与V20变频器的连接场景。该协议基于RS485物理层,通过主从式通讯架构实现参数读写与运动控制,相比PROFIBUS等总线方案具有硬件成本低、接线简单的优势。在输送带调速、风机控制等场景中,工程师可通过配置波特率、站地址等参数建立稳定通讯,并利用USS_DRV指令块实现启动停止、速度给定等核心功能。本文以S7-1200与V20的典型组合为例,详细解析硬件接线规范、博图软件配置及故障诊断方法,特别针对通讯超时、数据错误等常见问题提供解决方案。
ARM架构Q饱和运算原理与嵌入式开发实战
饱和运算是嵌入式系统中处理数值溢出的关键技术,通过钳位机制避免传统补码运算的回绕问题。其核心原理是通过硬件指令实现结果的范围限制,同时通过APSR寄存器的Q标志位提供溢出状态反馈。在ARM架构中,QADD、QSUB等指令为信号处理、电机控制等场景提供了安全的数值运算方案。相比软件实现的饱和逻辑,硬件指令能减少5-8倍的执行时间,在图像处理、音频算法等场景配合SIMD指令可实现3倍以上的性能提升。本文以电机控制和图像处理为例,详解Q饱和运算在嵌入式开发中的实战技巧与调试方法。
Boost电路LADRC控制:三阶ESO设计与工程实践
电力电子系统中的扰动抑制是提升系统稳定性的关键技术挑战。线性自抗扰控制(LADRC)通过扩张状态观测器(ESO)实现扰动解耦与实时补偿,其核心在于将系统动态分解为名义模型和总扰动分量。三阶ESO架构能同时跟踪系统状态、微分项及扰动项,形成具有预见性的主动控制能力。在Boost变换器等电力电子装置中,该技术可有效应对输入电压波动、负载跳变等工况,实测显示其恢复时间比传统PI控制缩短55%以上。工程实现时需重点考虑ESO带宽配置、离散化方法及参数自适应策略,典型应用包括光伏MPPT系统效率提升3-5%,风电变流器电网适应性增强等场景。
永磁同步电机转子初始位置检测技术解析
在电机控制领域,转子初始位置检测是确保永磁同步电机(PMSM)平稳启动的关键技术。传统方法依赖机械传感器,存在安装误差和可靠性问题。现代解决方案采用高频信号注入和脉冲响应分析相结合的无传感器技术,通过检测电感变化和电流响应差异实现精确定位。这种复合检测方案融合了高频方波电压注入与正负脉冲电压技术,无需额外硬件即可达到±5电角度精度。在工业伺服、机器人等高精度应用场景中,该技术能显著降低启动失败率,提升系统可靠性。特别是对于纺织机械等需要平稳启动的场合,有效消除了传统方法导致的抖动现象。
串联混动系统功率跟随控制算法与工程实践
混合动力系统通过发动机与电机的协同工作实现能效优化,其中功率跟随控制是关键技术。该技术基于动态基准功率计算和实时调整策略,使发动机工作在高效区间。在MATLAB仿真中,通过带死区的非线性增益控制和滑动平均滤波处理瞬态工况,结合动态规划优化全局功率分配。工程实践中需注意发动机响应延迟和电池温度特性,采用Cruise-MATLAB联合仿真验证算法。典型应用场景包括城市工况下的插电混动车型,实测可使发动机高效区工作时间提升至82%,燃油经济性提高17%。
三菱FX3U PLC与台达变频器Modbus通讯控制详解
Modbus RTU协议作为工业自动化领域广泛应用的串行通讯标准,通过RS485物理层实现主从设备间的可靠数据交换。其采用主从轮询机制和CRC校验,确保了工业现场恶劣环境下的通讯稳定性。在PLC控制系统中,Modbus协议常用于连接变频器、仪表等智能设备,实现频率设定、运行控制和状态监控等功能。以三菱FX3U PLC与台达VFD变频器的典型应用为例,通过485BD扩展板建立硬件连接,配置匹配的波特率与数据格式后,即可利用PLC的RS指令实现完整的Modbus通讯功能。该方案支持多台变频器组网控制,结合触摸屏人机界面可构建完整的自动化控制系统,广泛应用于包装机械、输送线等工业场景。
RK3588双系统启动(AB系统)UBOOT改造与编译实践
嵌入式系统中的双系统启动(AB系统)是一种提升设备可靠性和实现无缝升级的关键技术。其核心原理是通过冗余设计,在存储设备上维护两套完整的系统镜像,由引导程序(如UBOOT)根据策略动态选择启动分区。这种方案能有效避免系统升级失败导致的设备变砖问题,并支持快速回滚机制,特别适用于工业控制、物联网等对系统可靠性要求高的场景。以RK3588平台为例,实现AB系统需要在UBOOT层面进行多项改造,包括启动状态检测、系统选择逻辑、内核参数动态调整等关键技术点。通过合理配置存储分区和优化启动流程,可以显著提升嵌入式设备的稳定性和维护便利性。
逻辑无环流可逆直流调速系统的Matlab仿真实践
直流调速系统是工业自动化领域的核心控制技术,通过晶闸管整流实现电机转速精确调节。逻辑无环流设计采用状态机控制正反组晶闸管的互锁导通,从根本上消除了传统可逆系统中的环流问题,可提升8-12%系统效率。在Matlab/Simulink仿真环境下,通过搭建包含主电路、触发控制、逻辑切换和双闭环调节器的模块化系统,工程师可以验证无环流控制的可行性。该系统特别适用于轧钢机、电梯等需要频繁正反转的大功率场合,其中DLC模块的状态转换逻辑和0.1秒死区时间的设置是保证可靠切换的关键。通过转速电流双闭环设计和抗积分饱和处理,系统能实现超调<5%、调节时间<0.3s的高动态性能。
结构光三维重建:C语言实现与工业应用
三维重建是计算机视觉中的基础技术,通过分析物体表面形变获取几何信息。结构光作为主动视觉方法,利用编码光图案的形变解析深度,相比被动立体视觉具有更高精度和抗干扰性。其核心技术包括格雷码编码、相位解包裹和系统标定,在工业检测、逆向工程等场景广泛应用。本文实现的纯C语言方案通过内存优化和并行计算,达到50ms单帧处理速度与0.1mm精度,特别适用于嵌入式设备部署。项目中采用的定点数优化和多曝光融合技术,有效解决了高反光表面和实时性等工程难题。
三菱PLC与扫码枪RS232通信实战解析
工业自动化领域中,PLC与外围设备的可靠通信是实现智能产线的关键技术。通过RS232串口通信协议,可以建立稳定的设备间数据交互通道。本文以三菱FX3U PLC与得利捷扫码枪的实战对接为例,详细解析了硬件连接方案选型、通信协议配置、数据格式转换等核心环节。针对工业现场常见的电磁干扰、接地环路等问题,提供了电气隔离、防抖处理等工程解决方案。该案例涉及ASCII码转换、校验和验证等典型数据处理技术,对实现物料追溯、工艺参数调用等MES系统功能具有重要参考价值。
已经到底了哦
精选内容
1 国产热成像技术突破与选购指南2 虚拟同步机(VSG)控制技术原理与Simulink仿真实践3 DAB变换器Simulink建模与ZVS控制优化实践4 智能卡通信协议ISO/IEC 7816-3详解与应用实践5 永磁同步电机模型预测控制实现与仿真6 基于单片机的智能雨刷控制系统设计与实现7 MPC模型预测控制原理与MATLAB/C++实现详解8 工业自动化液位控制系统设计与实现9 工业机器人运动学与控制:六轴与SCARA全流程解析10 光伏储能双向换流器设计与控制技术详解
热门内容
1 杰理平台滑动触摸按键配置与调试实战2 罗德与施瓦茨SMU200A矢量信号发生器双通道设计解析3 C++智能指针详解:原理、应用与最佳实践4 安川机器人碳钢焊接参数优化与节气方案实践5 可综合Testbench设计与硬件验证实践6 新国标充电宝通信方案:CH9347芯片全解析7 西门子S7-1200 PLC恒压供水系统设计与PID控制实现8 STM32智能RFID车位控制系统设计与实现9 FPGA变频电路设计:从理论到实践的毕业项目指南10 光伏MPPT算法与Matlab实现详解
最新内容
STM32智能锂电池管理系统设计与实现
锂电池管理系统(BMS)是新能源设备中的核心组件,通过实时监测电压、电流、温度等参数保障电池安全。其技术原理基于高精度ADC采样和动态保护算法,结合STM32微控制器的强大外设资源,可构建从基础监测到智能联动的完整解决方案。在工程实践中,采用DMA传输和滑动滤波算法可提升采样稳定性,而库仑计与电压校正的混合算法则能提高电量计算精度。典型应用包括太阳能储能系统、电动工具等场景,其中STM32F103的性价比优势使其成为消费级产品的理想选择。本方案特别强化了过压/欠压/过流/过热四重保护机制,并通过云平台接入实现远程监控。
PROFINET与CANopen协议转换在高铁焊接产线的应用
工业通讯协议是自动化系统的神经脉络,PROFINET和CANopen作为主流工业协议各有优势:PROFINET基于工业以太网,适合大带宽、长距离传输;CANopen则在运动控制领域具有卓越实时性。协议差异导致系统集成面临数据帧结构、实时机制等核心挑战。智能网关通过硬件架构设计和多层协议转换算法,实现两种协议的无缝对接,特别适用于高铁焊接等精密制造场景。该方案不仅保留原有设备协议优势,还显著提升焊接质量(合格率提升2.7%)和系统可靠性(通讯延迟<5ms),为工业4.0时代的设备互联提供了经济高效的实践路径。
神马影视8.8系统架构解析:多品类视频管理实战
视频内容管理系统(CMS)是数字媒体领域的核心基础设施,其架构设计直接影响内容运营效率。现代CMS系统正从通用型向垂直专业化演进,通过微内核+插件化架构实现扩展性,配合品类专属的元数据模型和转码策略,解决不同类型内容的管理难题。以影视行业为例,电视节目、戏曲资源和动画内容在数据结构、播放特性和用户行为上存在显著差异。神马影视8.8系统采用接口隔离设计和动态模块加载,内置戏曲场次标记、动画系列关联等专业功能,配合智能推荐算法和混合存储方案,在阿里云实测中实现99.6%的播放成功率。这种分品类优化思路对视频门户、在线教育等需要处理多形态内容的平台具有重要参考价值。
C++异常安全:核心挑战与RAII设计实践
异常处理是编程语言中处理运行时错误的通用机制,其核心原理是通过栈展开实现错误传播。在C++中,异常安全设计面临内存泄漏、资源释放和状态一致性的技术挑战,这直接关系到系统的健壮性。RAII(资源获取即初始化)作为C++的核心范式,通过将资源生命周期与对象绑定,结合智能指针等工具,为异常安全提供了基础保障。在金融系统、高并发服务等关键场景中,异常安全等级(基本保证、强保证、不抛保证)的选择直接影响系统可靠性。现代C++的移动语义和noexcept特性进一步优化了异常安全实践,而事务性操作模式则为复杂业务逻辑提供了原子性保证。
二阶系统PID控制参数整定与MATLAB实现
PID控制作为工业自动化领域的经典控制算法,通过比例、积分、微分三个环节的协同作用实现对系统的精确控制。其核心原理是通过误差信号的实时反馈,动态调整控制量以达到期望的系统响应特性。在工程实践中,PID控制器的参数整定尤为关键,直接影响系统的稳定性、响应速度和抗干扰能力。特别是在处理二阶系统(如弹簧阻尼系统、电机控制系统)时,由于系统本身的振荡特性,PID参数的选择需要更加谨慎。通过MATLAB/Simulink仿真平台,工程师可以直观地观察不同PID参数对系统阶跃响应的影响,包括上升时间、超调量和调节时间等关键指标。在实际应用中,结合自动整定算法和实时调参技术,能够有效提升控制系统的性能。
工控技术学习法:ESim电工仿真与实践
工控技术作为工业自动化的核心,其学习过程需要结合理论与实践。传统的学习方法往往因缺乏动态复杂性和实践依赖性而失效。ESim电工仿真软件通过零风险实验场、时空自由度和知识可视化三大优势,为工控技术学习提供了全新途径。通过观察-思考-搜索的系统训练,工程师可以快速掌握PLC编程、变频器调试等核心技能。本文以星三角启动电路为例,详细解析了如何利用ESim进行参数优化和故障预判,帮助工程师在实际工作中实现从仿真到现场的平滑过渡。
BLDC/PMSM电机控制中霍尔信号转电气角度的实现与优化
在电机控制系统中,霍尔传感器是实现位置检测的关键元件,其输出的三路方波信号需要转换为连续的电气角度才能用于精确控制。通过信号滤波、状态机处理和角度补偿算法,可以克服霍尔传感器固有的60度分辨率限制。在无刷直流电机(BLDC)和永磁同步电机(PMSM)控制中,准确的电气角度计算直接影响着换相精度和转矩输出性能。本文以STM32和TI C2000平台为例,详细解析了包含速度补偿、安装偏移校准等关键技术的高效实现方法,并分享了工业级应用中解决信号干扰、低速抖动等典型问题的工程经验。
锁相放大器原理与Signal Recovery 7280应用解析
锁相放大器作为微弱信号检测的关键设备,通过相敏检测技术实现噪声背景下特定频率信号的精准提取。其核心原理是将输入信号与参考信号混频后滤波,利用信号相关性抑制无关噪声。现代数字锁相放大器(如Signal Recovery 7280)采用全数字化处理架构,通过高速ADC采样和数字正交解调技术,解决了传统模拟方案的漂移问题。这类仪器在光电检测、材料表征等需要纳伏级信号测量的场景中具有不可替代性,特别是7280系列支持的谐波分析和虚拟参考模式,为非线性系统研究和无参考信号场景提供了创新解决方案。
SMP架构下的任务调度与CPU亲和性优化实践
在多核处理器系统中,任务调度是操作系统核心功能之一,直接影响系统性能。对称多处理(SMP)架构通过共享内存实现多核并行,但需要复杂的调度策略来优化资源利用。任务亲和性(Affinity)技术允许将特定任务绑定到指定CPU核心,通过减少缓存失效和跨NUMA节点访问来提升性能。现代Linux调度器结合完全公平调度(CFS)算法和负载均衡机制,在保持公平性的同时最大化吞吐量。在数据库、高频交易等场景中,合理的调度策略和CPU绑定可以显著降低延迟,提升缓存命中率。本文通过实测数据展示不同亲和性设置对L3缓存命中率和吞吐量的影响,为性能敏感型应用提供调优指导。
FPGA实现160MHz高速SPI通信的Verilog方案
SPI(串行外设接口)作为嵌入式系统中广泛使用的同步串行通信协议,其高速稳定实现是FPGA设计中的关键技术难点。SPI通信通过主从设备间的时钟同步实现全双工数据传输,其性能瓶颈主要来自时序收敛和信号完整性。在FPGA工程实践中,采用时钟分频技术替代传统PLL方案,可有效降低时钟抖动并简化时序分析。本文以160MHz高速SPI为例,详细解析了基于Verilog的寄存器布局优化和双缓冲架构设计,这些方法同样适用于I2C、UART等串行接口的高速实现。通过精确控制采样点和采用专用时钟布线,该方案在Xilinx和Intel FPGA平台上均实现了稳定的眼图性能,为工业自动化、高速数据采集等场景提供了可靠的通信解决方案。