UART接口深度解析与Air780Exx模组工程实践

1. UART接口深度解析与工程实践
作为一名嵌入式工程师,UART接口就像空气一样无处不在却又容易被忽视。很多人觉得UART不就是两根线的事?但真正做过工业级产品的同行都知道,一个看似简单的串口通信背后藏着多少"坑"。最近用Air780Exx系列模组完成了一个物联网终端项目,期间对UART的软硬件协同设计有了新的认识,今天就把这些实战经验系统梳理出来。
UART通信的稳定性往往决定了整个系统的可靠性。在智能水表项目中,我们遇到过因波特率偏差导致的数据包丢失;在工业传感器网络中,电平不匹配造成的信号畸变曾让我们排查了整整三天。这些教训都说明:只有深入理解UART的硬件特性和软件机制,才能设计出经得起现场考验的通信系统。
2. Air780Exx UART接口特性详解
2.1 接口配置全景图
Air780Exx系列模组提供了多路UART接口,但每路都有其特殊定位:
-
调试UART (UART0):硬件工程师的"生命线"
- 固定用于系统调试输出,不可作为通用串口
- 实际产品中必须在PCB上预留测试点
- 波特率特性:开机115200bps → 日志输出时自动切换至6Mbps(不可更改)
-
通用UART (UART1/2/3):业务通信的主干道
- UART1独有LPUART低功耗特性
- UART2在某些型号中被GNSS模块占用
- 最高支持2Mbps波特率(需专用电平转换芯片)
硬件设计警示:UART0如果未引出测试点,后期调试将极其困难。曾有个项目因此不得不飞线连接,导致EMC测试失败。
2.2 型号差异对照表
不同型号的UART可用性存在关键差异:
| 型号类别 | 代表型号 | UART0 | UART1 | UART2 | UART3 |
|---|---|---|---|---|---|
| 纯4G型号 | Air780EPM/EHM/EHN/EHU | 调试 | 可用 | 可用 | 可用 |
| 通信定位二合一 | Air780EGP/EGG/EGH | 调试 | 可用 | GNSS占用 | 可用 |
这个差异在选型阶段就必须考虑清楚。我们有个项目最初选用了EGP型号,后来发现需要三路通用UART,不得不更换模组型号,导致PCB重新设计。
2.3 接口特性深度剖析
2.3.1 UART1的低功耗玄机
LPUART特性使UART1成为低功耗设计的首选,但隐藏着几个关键陷阱:
-
唤醒序列的特殊性
- 低功耗模式下仅响应9600bps
- 唤醒后需重新同步波特率(如切换至115200bps)
- 实测数据:唤醒延迟约15ms(需计入通信时序设计)
-
数据丢失窗口
- 唤醒过程中前3-5个字节必然丢失
- 解决方案:在通信协议中加入前导码
lua复制-- 典型唤醒序列处理 local function handle_wakeup() uart.setup(1, 9600) -- 初始低功耗波特率 sys.wait(50) -- 等待稳定 uart.write(1, "WAKEUP\n") -- 发送唤醒命令 sys.wait(20) -- 等待响应 uart.setup(1, 115200) -- 切换工作波特率 end -
开机日志干扰
- 上电后约200ms的系统日志输出无法禁用
- 应对策略:硬件上加装模拟开关,或软件上设置过滤机制
2.3.2 高速传输的硬件瓶颈
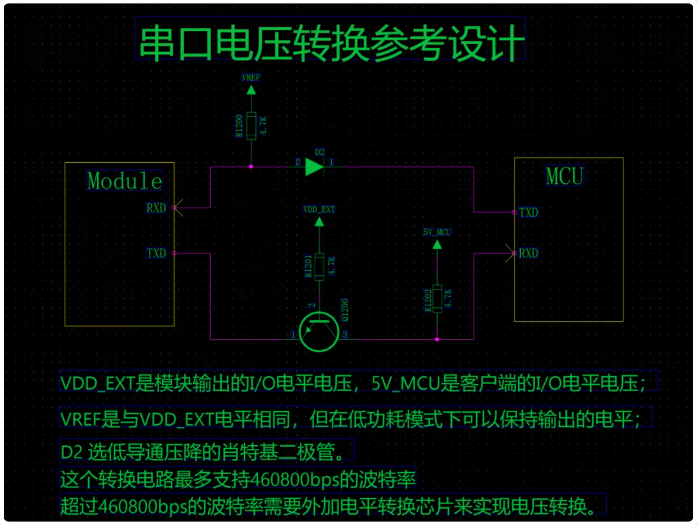
当波特率超过460800bps时,传统三极管电平电路会出现明显边沿畸变。实测数据对比:
| 波特率 | 三极管电路误码率 | 专用芯片误码率 |
|---|---|---|
| 115200 | 0.01% | <0.001% |
| 460800 | 0.8% | 0.005% |
| 921600 | 12% | 0.01% |
| 2000000 | 不工作 | 0.02% |
建议高速场景选用TXS0108E等专业电平转换芯片,虽然成本增加$0.3,但可靠性提升两个数量级。
3. 硬件设计黄金法则
3.1 电平控制核心参数
Air780Exx的UART接口电平由pm.ioVol()控制,但有几个铁律:
-
绝对耐压上限3.6V
- 超过此值可能立即损坏模组
- 典型案例:某设计误接5V TTL,上电即烧毁UART控制器
-
推荐工作电压
- 1.8V:最低功耗选择
- 3.3V:最佳兼容性方案
- 2.8V:折中方案(部分外设需此电平)
3.2 电平转换电路选型指南
3.2.1 经典三极管方案
适用场景:
- 波特率≤460800bps
- 成本敏感型项目
- 中低干扰环境
设计要点:
- Q1选用2N7002等小信号MOSFET
- R1/R2阻值根据实际电平计算:
code复制R1 = (Vcc_out - Vgs_th) / Iol_max R2 = (Vcc_in - Vgs_th) / Iol_max - 布局时走线长度<3cm
3.2.2 专业芯片方案

推荐型号:
- TXS0108E:支持8通道自动方向控制
- MAX3232:经典RS232电平转换
- ADM3202:工业级EMC增强型
优势对比:
- 边沿速率提升5-10倍
- 支持热插拔保护
- 集成ESD防护(可达8kV)
4. 软件配置实战精要
4.1 LuatOS初始化流程
UART配置必须遵循严格的初始化序列:
-
管脚功能映射
lua复制-- UART1初始化示例 local function init_uart1() -- 先配置GPIO复用功能 gpio.setup(17, nil, gpio.PULLUP) -- TX gpio.setup(18, nil, gpio.PULLUP) -- RX -- 再初始化UART uart.setup(1, 115200, 8, uart.PAR_NONE, uart.STOP_1) end -
低功耗模式特殊处理
lua复制pm.request(pm.WORK_MODE, 1) -- 进入低功耗模式 sys.taskInit(function() while true do if uart.isReady(1) then local data = uart.read(1, 1024) -- 数据处理逻辑 end sys.wait(20) end end)
4.2 数据收发优化技巧
-
环形缓冲区应用
lua复制local rx_buff = zbuff.create(2048) uart.on(1, "receive", function(id, len) uart.rx(id, rx_buff, len) -- 触发数据处理任务 sys.publish("UART1_DATA", len) end) -
流量控制模拟
lua复制local flow_ctrl = false uart.on(1, "sent", function(id) flow_ctrl = false sys.publish("UART1_TX_READY") end) function safe_write(data) while flow_ctrl do sys.waitUntil("UART1_TX_READY", 1000) end flow_ctrl = true uart.write(1, data) end
5. 工程疑难问题攻坚
5.1 典型故障排查表
| 故障现象 | 可能原因 | 解决方案 |
|---|---|---|
| 接收数据乱码 | 波特率偏差>3% | 校准时钟源,使用自动波特率检测 |
| 通信距离短 | 未加终端匹配电阻 | 添加120Ω端接电阻 |
| 偶发数据丢失 | 缓冲区溢出 | 增大缓冲区,优化接收处理流程 |
| 低功耗模式无法唤醒 | 唤醒波特率非9600 | 严格遵循唤醒序列 |
| ESD损坏 | 未做静电防护 | 添加TVS二极管阵列 |
5.2 抗干扰设计三要素
-
PCB布局规范
- UART走线远离高频信号线(保持3W间距)
- 地平面完整不分割
- 过孔数量≤3个/10cm
-
滤波电路设计
code复制TX/RX线路串联22Ω电阻 + 100pF电容对地 -
软件容错机制
- 增加CRC校验
- 实现超时重传
- 数据包序号检测
6. 性能优化进阶路线
6.1 波特率精度提升方案
传统16倍过采样在高速模式下误差明显,推荐:
-
使用分数波特率发生器
lua复制-- Air780Exx支持分数分频 uart.setup(1, 115201, 8, uart.PAR_NONE, uart.STOP_1, {div_fraction=7}) -
自动波特率同步技术
lua复制function auto_baud() local patterns = {9600, 19200, 38400, 57600, 115200} for _, baud in ipairs(patterns) do uart.setup(1, baud) uart.write(1, "AT\r\n") local resp = uart.read(1, 100, 200) if resp and resp:match("OK") then return baud end end return nil end
6.2 功耗优化组合拳
-
动态时钟调节
- 空闲时降低UART时钟频率
- 检测到起始位立即恢复全速
-
智能唤醒策略
lua复制pm.register("UART1_WAKE", function() pm.request(pm.WORK_MODE, 0) -- 立即唤醒 sys.timerStart(function() pm.request(pm.WORK_MODE, 1) end, 30000) -- 30秒无活动后休眠 end) -
硬件加速配置
- 启用DMA传输
- 使用硬件FIFO缓冲
在最近的一个智慧农业项目中,通过上述优化使模组整体功耗从12mA降至3.8mA,电池续航从3个月延长到9个月。这充分证明,对UART特性的深入理解和精细调优,能带来显著的工程效益。