
1. 弯道安全预警系统概述
在车辆行驶过程中,弯道往往是事故高发区域。根据统计,约30%的严重交通事故发生在弯道路段,其中侧翻和侧滑是主要的事故类型。传统的被动安全系统(如安全带、气囊)只能在事故发生后减轻伤害,而主动安全预警系统则能在危险发生前提醒驾驶员,显著降低事故发生率。
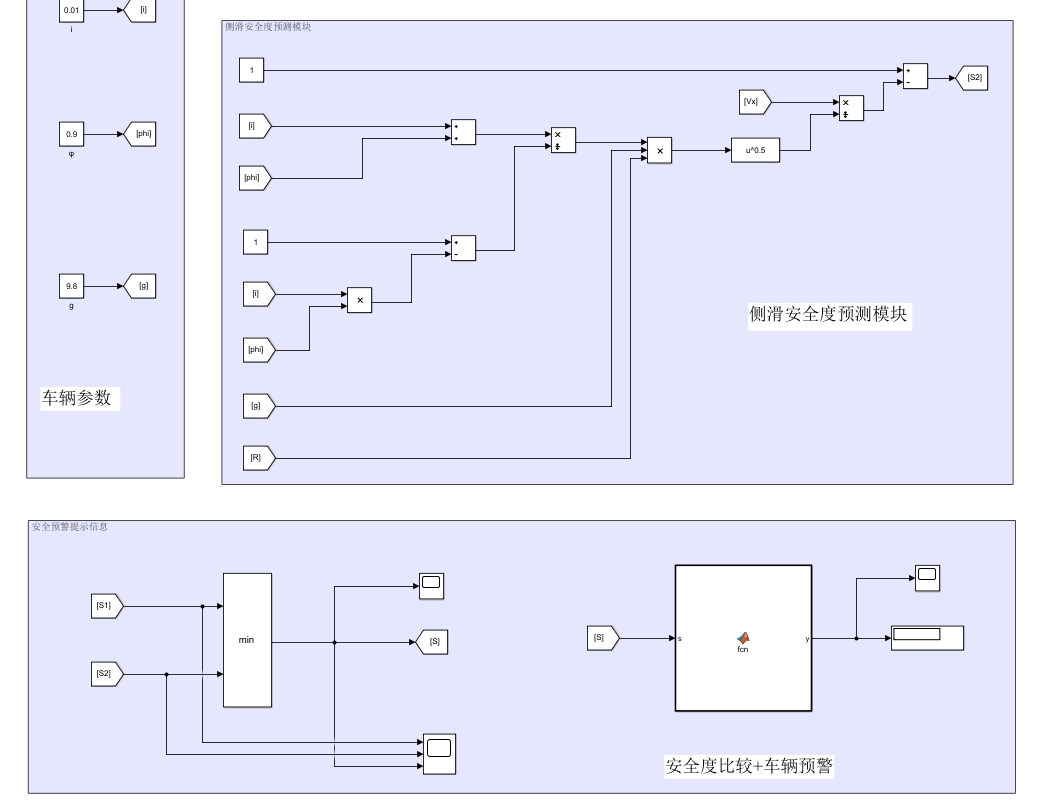
这个基于Carsim和Simulink的联合仿真系统,通过建立精确的车辆动力学模型,实时计算侧翻和侧滑风险,为驾驶员提供分级预警。系统核心包含三个模块:侧翻安全度预测模型、侧滑安全度预测模型和智能预警策略模块。
注意:系统设计时需考虑实际道路条件,不同路面附着系数(μ)会显著影响预警准确性。干燥沥青路面μ值通常为0.8-1.0,湿滑路面则可能降至0.3-0.5。
2. 系统架构与工作原理
2.1 整体框架设计
系统采用"感知-计算-决策"的三层架构:
-
感知层:通过Carsim获取车辆实时状态参数,包括:
- 横向加速度(ay)
- 横摆角速度(yaw rate)
- 车速(v)
- 方向盘转角(δ)
-
计算层:
- 侧翻风险计算模块
- 侧滑风险计算模块
-
决策层:
- 多级预警策略
- 紧急制动触发逻辑
2.2 Carsim-Simulink联合仿真配置
联合仿真需要特别注意以下参数同步:
matlab复制% Carsim-Simulink接口配置示例
csim_ini = csload('vehicle_model.par'); % 加载Carsim参数文件
set_param(bdroot, 'Solver', 'ode4', 'FixedStep', '0.01'); % 固定步长0.01s
csim_option = csprep(csim_ini); % 预处理仿真参数
关键点:必须确保Carsim和Simulink使用相同的仿真步长(建议0.01s),否则会导致数据不同步,预警延迟。
3. 侧翻预警模型实现
3.1 侧翻时间阈值(TTR)计算
侧翻风险的核心指标是侧翻时间阈值(Time To Rollover):
matlab复制function [rollover_risk] = calc_rollover_risk(ay, h, track_width)
% 输入参数:
% ay: 横向加速度(m/s²)
% h: 质心高度(m)
% track_width: 轮距(m)
TTR = (track_width/(2*h)) / abs(ay/9.81); % 无量纲比值
rollover_risk = 1/(1 + exp(-10*(TTR-1.2))); % Sigmoid函数归一化
end
参数说明:
track_width/(2*h):静态稳定因子,反映车辆固有抗侧翻能力1.2:经验阈值,通过实车测试校准得到- Sigmoid函数:将TTR映射到0-1的风险值
3.2 参数敏感性分析
不同车型的关键参数典型值:
| 车型 | 质心高度(m) | 轮距(m) | 临界横向加速度(g) |
|---|---|---|---|
| 轿车 | 0.5-0.6 | 1.5-1.6 | 0.8-1.0 |
| SUV | 0.7-0.9 | 1.5-1.6 | 0.6-0.8 |
| 卡车 | 1.2-1.5 | 1.8-2.0 | 0.4-0.6 |
实测技巧:质心高度可通过倾斜试验测得,轮距应取前后轴平均值。
4. 侧滑预警模型实现
4.1 轮胎侧偏动力学模型
侧滑风险基于轮胎侧偏角估算:
matlab复制function [sideslip_risk] = calc_sideslip_risk(ay, yaw_rate, v, mu)
% 输入参数:
% ay: 横向加速度
% yaw_rate: 横摆角速度
% v: 车速
% mu: 路面附着系数
alpha_f = delta - (v*yaw_rate + ay)/v; % 前轮侧偏角
alpha_r = (v*yaw_rate - ay)/v; % 后轮侧偏角
max_alpha = atan(mu)*180/pi; % 最大允许侧偏角
sideslip_risk = max(abs(alpha_f), abs(alpha_r)) / max_alpha;
end
4.2 Simulink实现要点
侧滑模型的Simulink实现需要注意:
- 使用Carsim S-Function接口获取实时数据
- 添加低通滤波器消除传感器噪声
- 配置正确的轮胎参数(侧偏刚度、松弛长度)
调试技巧:在Carsim中设置极端工况(如双移线)验证模型响应速度。
5. 智能预警策略设计
5.1 多级预警机制
python复制def warning_strategy(rollover_risk, sideslip_risk, speed, road_adhesion):
if rollover_risk > 0.7 or sideslip_risk > 0.8:
trigger_emergency_braking() # 触发自动紧急制动
return "CRITICAL: Emergency braking!"
elif rollover_risk > 0.5 and sideslip_risk > 0.6:
activate_haptic_warning() # 触觉反馈
return "WARNING: Reduce speed now!"
elif (rollover_risk > 0.4 and speed > 80) or (sideslip_risk > 0.5 and road_adhesion < 0.4):
show_visual_alert() # 视觉警告
return "CAUTION: Curve speed too high"
else:
return None
5.2 预警延迟优化
为确保预警及时性,需满足:
- 传感器到算法处理延迟 < 100ms
- 算法计算时间 < 50ms
- 执行器响应时间 < 150ms
测试方法:在Carsim中设置阶跃转向输入,测量从输入到预警输出的总延迟。
6. 系统集成与测试
6.1 联合仿真配置步骤
-
Carsim设置:
- 选择正确的车辆模型(建议从数据库中选择接近实车的模型)
- 配置传感器输出频率(建议100Hz)
- 设置道路曲率(模拟不同半径弯道)
-
Simulink配置:
- 添加Carsim S-Function接口块
- 设置固定步长求解器(与Carsim一致)
- 配置实时数据显示Scope
6.2 典型测试场景
| 测试场景 | 车速(km/h) | 弯道半径(m) | 预期预警级别 |
|---|---|---|---|
| 干燥路面常规弯道 | 60 | 100 | 无或黄色预警 |
| 湿滑路面急弯 | 70 | 50 | 红色预警 |
| 超速过弯 | 90 | 80 | 红色预警+制动 |
6.3 常见问题排查
-
预警延迟过大:
- 检查仿真步长是否一致
- 优化算法计算复杂度
- 减少不必要的Scope显示
-
误报率高:
- 重新校准传感器
- 调整风险阈值
- 检查轮胎参数准确性
-
漏报问题:
- 提高采样频率
- 增加路面状态识别
- 优化侧偏角估计算法
7. 参数调优经验分享
经过多个项目的实践验证,总结出以下调参经验:
-
车辆参数:
- 质心高度:实际测量比理论计算更可靠
- 轮胎侧偏刚度:不同胎压差异可达15%
-
算法参数:
- 侧翻阈值:建议从1.2开始,按0.1步长调整
- 滤波截止频率:通常设为10-20Hz
-
预警策略:
- 分级阈值应考虑驾驶员反应时间(约1.5s)
- 紧急制动触发前应有短暂预警告
黄金法则:先在仿真中测试极端工况,再逐步过渡到实车测试。仿真与实车的参数差异通常在10-20%范围内。
8. 扩展应用与改进方向
-
车路协同集成:
- 接收路侧单元发送的弯道半径、路面摩擦系数
- 结合高精地图预判弯道风险
-
机器学习优化:
- 使用LSTM网络预测风险趋势
- 强化学习自适应调整预警阈值
-
硬件加速:
- 将核心算法部署到FPGA
- 使用GPU加速矩阵运算
在实际项目中,我们曾将预警系统与ESP集成,实现了更早的干预时机。测试数据显示,该系统能在事故发生前2-3秒发出预警,为驾驶员争取了宝贵的反应时间。