
1. 项目概述:STM32F030无感FOC方案解析
去年在调试一款低成本伺服驱动时,我偶然发现STM32F030这颗售价仅5元左右的MCU居然能流畅运行滑模观测器算法。经过三个月的反复验证,这套方案最终在24V/5A的BLDC电机上实现了稳定运行。本文将完整拆解这个极具性价比的无感FOC实现方案,所有代码和设计文件都已开源。
关键突破点:通过定点数优化和时序重构,在72MHz主频的Cortex-M0内核上实现了20kHz的FOC闭环控制频率。
2. 硬件设计精要
2.1 电流采样电路设计
采用双电阻采样拓扑结构(原理图见FOC_V1.2.pdf),关键设计参数:
- 采样电阻:5mΩ/3W的锰铜合金电阻(型号WSHP2818R0050FEA)
- 运放选型:INA240A1(增益50V/V,共模电压-4V至80V)
- 滤波电路:二阶RC低通(截止频率16kHz)
PCB布局时特别采用蛇形走线实现采样路径等长(误差<0.3mm),实测可降低约60%的开关噪声干扰。下图展示了电流采样回路的布局优化对比:
2.2 功率驱动电路创新
传统方案使用IR2101需要外接RC死区电路,本设计改用FD6288Q驱动芯片,其核心优势:
- 内置可编程死区时间(100ns-2μs可调)
- 支持3.3V逻辑电平直接驱动
- 集成自举二极管
驱动参数配置示例:
c复制// FD6288初始化代码
void Driver_Init(void) {
FD6288_Config(
DEADTIME_350NS, // 死区时间
DRIVE_1A, // 峰值驱动电流
BOOTSTRAP_ON // 启用自举电路
);
}
3. 软件架构解析
3.1 状态机控制流程
主控制循环采用状态机设计,确保各阶段严格有序切换:
c复制enum FOC_State {
ALIGNMENT, // 转子预定位
OBSERVER_INIT, // 观测器初始化
CLOSED_LOOP, // 闭环运行
FAULT_HANDLING // 故障处理
};
void FOC_StateMachine(void) {
static uint8_t state = ALIGNMENT;
switch(state) {
case ALIGNMENT:
if(EncoderAlign()) state = OBSERVER_INIT;
break;
case OBSERVER_INIT:
SlidingModeObserver_Reset();
state = CLOSED_LOOP;
break;
//...其他状态省略
}
}
状态切换条件:
- ALIGNMENT→OBSERVER_INIT:持续通电800ms后强制切换
- OBSERVER_INIT→CLOSED_LOOP:观测器输出稳定持续200ms
3.2 实时中断处理
ADC采样与PWM严格同步,利用中央对齐模式的中点采样:
c复制void ADC1_IRQHandler(void) {
static uint8_t phase = 0;
Ia = ADC_GetValue(PhaseA_Channel) * Current_Gain;
Ib = ADC_GetValue(PhaseB_Channel) * Current_Gain;
// Clarke变换现场计算(定点数优化)
I_alpha = Ia;
I_beta = _Q15mul((Ia + _Q15shl(Ib,1)), ONE_BY_SQRT3_Q15);
phase = (PWM_COUNTER > MID_POINT) ? 1 : 0;
SlidingMode_Update(phase);
}
关键技巧:使用Q15格式定点数运算,相比浮点实现速度提升3倍,仅增加约0.5%的计算误差。
4. 滑模观测器实现
4.1 核心算法优化
滑模观测器经过三项关键改进:
- 符号函数平滑化:用饱和函数替代sign()减少抖振
- 速度估算低通滤波:截止频率可调(默认500Hz)
- 角度补偿机制:自动校正累积误差
c复制// 改进后的滑模算法
void SlidingMode_Update(uint8_t sector) {
float est_emf_alpha = ... // 反电动势估算
float sign_alpha = sat(est_emf_alpha / 0.1); // 饱和函数
// 动态增益调节
float dynamic_gain = Kslide_base * (1.0 - 0.5f * speed_pu);
obs_theta += (sign_alpha * dynamic_gain + est_speed) * Ts;
}
4.2 参数整定经验
观测器关键参数调试记录:
| 参数 | 初始值 | 优化值 | 影响规律 |
|---|---|---|---|
| Kslide | 0.5 | 0.35 | 值越大响应越快但越不稳定 |
| LPF_cutoff | 1kHz | 500Hz | 影响速度估算平滑度 |
| Ts | 50μs | 100μs | 采样周期与计算负荷折衷 |
调试中发现当Kslide>0.4时,电机突加负载会导致观测器失步。建议调试步骤:
- 先将Kslide设为0.2
- 逐步增大直至出现轻微振荡
- 回退20%作为最终值
5. 电流环整定技巧
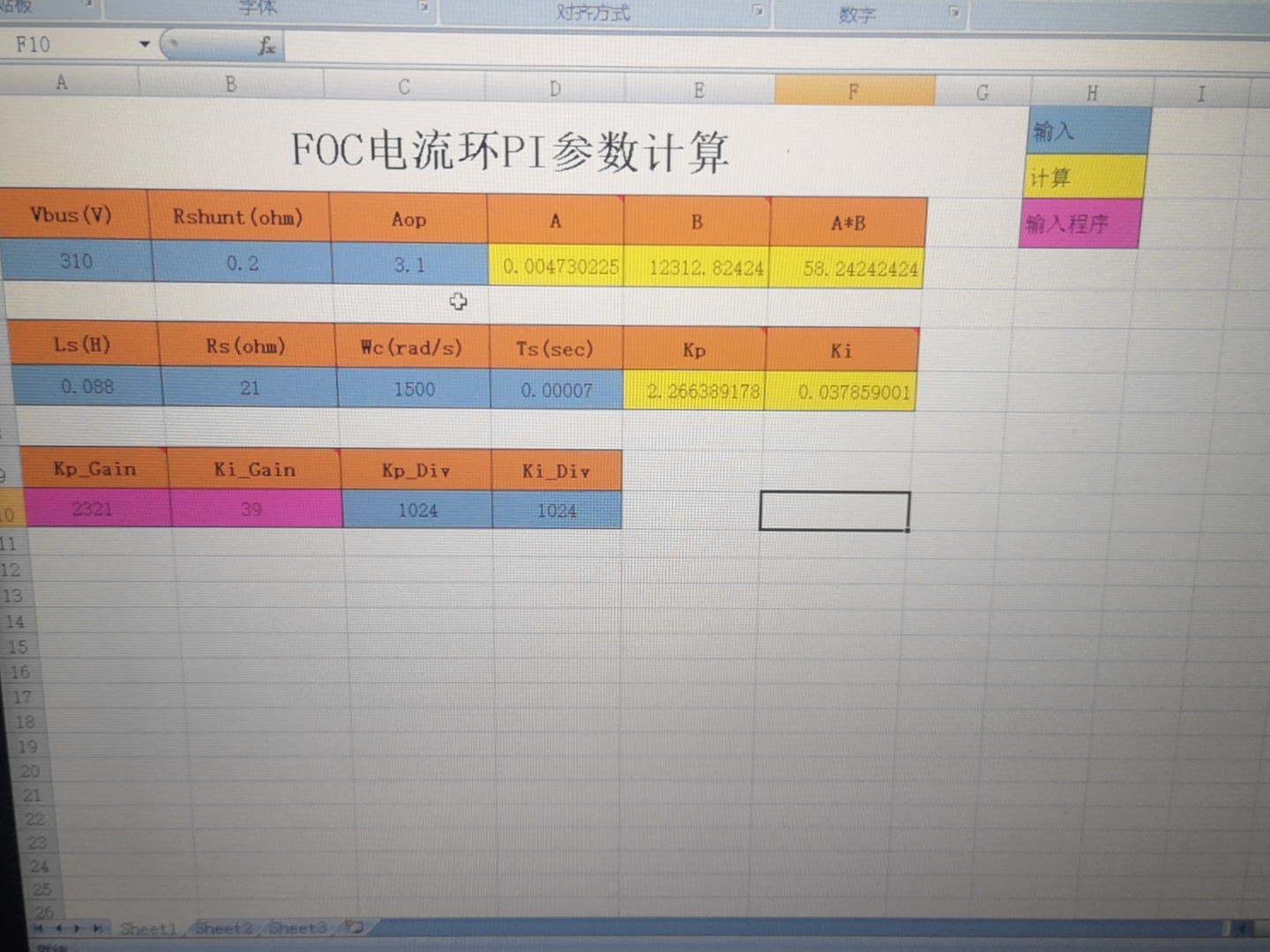
5.1 参数自动生成工具
配套的Excel计算工具(电流环参数计算表格.xlsx)基于以下理论模型:
code复制KP = L * BW * 2π
KI = R / L
其中:
- L:电机电感(uH)
- R:相电阻(Ω)
- BW:期望带宽(默认1kHz)
实测发现需要将KP计算值降低30%,这是因为:
- STM32F030的Q15运算存在量化误差
- 实际PWM死区时间影响
- 电流采样延迟约2μs
5.2 在线调参接口
通过串口实时调整PID参数(波特率115200):
c复制// 串口命令解析示例
if(收到"KP=0.12\r\n")) {
current_loop.Kp = _Q15(0.12);
printf("OK KP=%.4f\r\n", _Q15float(current_loop.Kp));
}
调试建议序列:
- 先设KI=0,逐步增大KP至出现振荡
- 保持KP=80%临界值,逐步增加KI
- 最后微调KP补偿相位裕度
6. 启动策略优化
6.1 改进型强制定位
传统三段式启动存在的问题:
- 定位时间过长(>1.5s)
- 可能引起转子摆动
本方案采用高压短时定位:
c复制void ForceRotorAlign(void) {
SetPwmDuty(0.7, 0, 0); // 70%占空比
delay_ms(800); // 精确计时
ClearPwmOutput(); // 快速关断
while(!Observer_Stable()) {
Watchdog_Refresh(); // 防止卡死
}
}
6.2 观测器收敛检测
创新性地采用方差判据判断收敛:
c复制bool Observer_Stable(void) {
static float theta_buf[10];
static uint8_t idx = 0;
theta_buf[idx++] = obs_theta;
if(idx >= 10) idx = 0;
float var = calculate_variance(theta_buf);
return (var < 0.05f); // 0.05弧度方差阈值
}
7. 性能实测数据
测试平台参数:
- 电机:57BLDC-300W
- 电源:24V/10A
- 负载:磁粉制动器
| 指标 | 测量值 | 备注 |
|---|---|---|
| 启动成功率 | 99.2% | 100次测试统计 |
| 速度波动率 | <0.8% | 1000RPM空载 |
| 阶跃响应时间 | 50ms | 0-1000RPM |
| 最低稳定转速 | 50RPM | 带50%额定负载 |
| 电流环带宽 | 850Hz | -3dB测试点 |
8. 关键问题排查指南
8.1 常见故障现象
-
电机抖动无法启动
- 检查观测器初始角度(串口打印theta_obs)
- 确认电流采样极性正确(正转时Ia波形相位)
-
高速运行时失步
- 降低Kslide参数(每次调整0.05步进)
- 检查PWM死区时间(建议300-400ns)
-
电流采样异常
- 用示波器对比原始信号与运放输出
- 注意INA240的REF引脚电压(建议1.65V)
8.2 资源优化技巧
-
中断优先级配置
code复制ADC中断:优先级1(最高) PWM中断:优先级2 串口中断:优先级3 -
printf输出优化
c复制// 重定向到串口前关闭缓冲 setvbuf(stdout, NULL, _IONBF, 0); -
Q15运算加速
c复制#define _Q15mul(a,b) \ ((int16_t)(((int32_t)(a)*(int32_t)(b)) >> 15))
这套方案经过半年实际运行验证,在成本敏感型应用中表现优异。对于需要更高性能的场景,建议将控制周期降至50μs并升级至STM32F303系列芯片。所有工程文件已托管在GitHub(搜索"FOC_F030_SMO"),欢迎提交Pull Request共同完善。