
1. 直流无刷电机控制技术概述
直流无刷电机(BLDC)作为现代工业中的核心动力元件,其控制算法的优劣直接决定了系统性能。在工业自动化、机器人、电动汽车等领域,对电机控制的响应速度、稳态精度和抗干扰能力都提出了极高要求。本文将深入剖析三种主流控制策略:经典PID控制、模糊PID控制以及滑模控制(SMC),通过理论分析、代码实现和实测对比,帮助工程师选择最适合特定应用场景的控制方案。
关键提示:选择控制算法时需综合考虑系统动态特性、环境干扰强度以及实时性要求。例如医疗设备更注重控制平滑性,而无人机电调则优先考虑响应速度。
2. 传统PID控制实现与调参技巧
2.1 PID控制核心原理
PID控制器通过三路并联校正实现闭环控制:
- 比例项(P):即时响应当前偏差,系数Kp决定系统"刚性"
- 积分项(I):消除稳态误差,系数Ki影响收敛速度
- 微分项(D):预测误差变化趋势,系数Kd抑制超调
离散化PID公式:
code复制u(k) = Kp*e(k) + Ki*∑e(j) + Kd*[e(k)-e(k-1)]
2.2 参数整定实战方法
Ziegler-Nichols临界比例法步骤:
- 置Ki=Kd=0,逐渐增大Kp至系统出现等幅振荡
- 记录临界增益Ku和振荡周期Tu
- 按表格设置参数:
- P控制:Kp=0.5Ku
- PI控制:Kp=0.45Ku, Ki=0.54Ku/Tu
- PID控制:Kp=0.6Ku, Ki=1.2Ku/Tu, Kd=0.075Ku*Tu
现场调试经验:
- 先调P至系统快速响应但略有超调
- 再调D抑制超调,注意噪声放大问题
- 最后调I消除静差,避免积分饱和
- 采样周期建议取系统响应时间的1/10~1/5
2.3 代码实现优化
python复制class AntiWindupPID:
def __init__(self, kp, ki, kd, max_output):
self.kp, self.ki, self.kd = kp, ki, kd
self.max_out = max_output
self.prev_err = self.integral = 0
def compute(self, target, feedback):
err = target - feedback
self.integral += self.ki * err
# 抗饱和处理
if abs(self.integral) > self.max_out:
self.integral = np.sign(self.integral)*self.max_out*0.8
derivative = err - self.prev_err
output = self.kp*err + self.integral + self.kd*derivative
self.prev_err = err
return np.clip(output, -self.max_out, self.max_out)
常见问题:电机启动时出现"积分饱和",表现为控制量持续最大但电机不转。解决方法包括积分分离、抗饱和限幅等。
3. 模糊PID智能控制详解
3.1 模糊控制理论基础
模糊控制器通过隶属度函数实现精确量到模糊量的转化,典型结构包含:
- 模糊化接口:将输入变量映射到模糊集
- 知识库:存放模糊规则和隶属函数
- 推理机:基于规则进行模糊推理
- 解模糊化:将模糊输出转为精确量
3.2 模糊规则库设计实例
以转速控制为例,设计双输入单输出模糊控制器:
- 输入1:转速误差e(负大NB, 负小NS, 零ZO, 正小PS, 正大PB)
- 输入2:误差变化率ec(同e的模糊集)
- 输出:PID参数调整量ΔKp, ΔKi, ΔKd
49条典型规则示例:
| e \ ec | NB | NS | ZO | PS | PB |
|---|---|---|---|---|---|
| NB | PB | PB | PM | PS | ZO |
| NS | PB | PM | PS | ZO | NS |
| ZO | PM | PS | ZO | NS | NM |
| PS | PS | ZO | NS | NM | NB |
| PB | ZO | NS | NM | NB | NB |
3.3 自适应参数调整实现
python复制import skfuzzy as fuzz
class FuzzyPID:
def __init__(self):
# 定义模糊变量和隶属函数
self.e = fuzz.Antecedent(np.arange(-1,1,0.1), 'error')
self.ec = fuzz.Antecedent(np.arange(-0.5,0.5,0.05), 'error_change')
self.delta_kp = fuzz.Consequent(np.arange(-0.3,0.3,0.01), 'delta_kp')
# 自动生成隶属函数
names = ['nb','ns','zo','ps','pb']
self.e.automf(names=names)
self.ec.automf(names=names)
# 手动设置输出隶属函数
self.delta_kp['nb'] = fuzz.trimf(self.delta_kp.universe, [-0.3,-0.3,-0.1])
# ...其他隶属函数定义
# 加载规则库
self.rule1 = fuzz.Rule(self.e['nb'] & self.ec['nb'], self.delta_kp['pb'])
# ...添加所有规则
self.ctrl = fuzz.ControlSystem([self.rule1, ...])
def adjust(self, err, err_c):
# 模糊推理计算参数调整量
self.e.input['error'] = err
self.ec.input['error_change'] = err_c
self.ctrl.compute()
return self.delta_kp.output['delta_kp']
调试技巧:初始阶段可先用Matlab Fuzzy Toolbox进行规则验证,再移植到嵌入式平台。实测表明,模糊PID在负载突变时调节时间比传统PID缩短约40%。
4. 滑模控制(SMC)设计与抖振抑制
4.1 滑模控制基本原理
滑模控制的核心是设计滑模面s(x)=0,使系统状态在有限时间内到达滑模面,并沿滑模面向平衡点滑动。其显著特点是:
- 对参数变化和外部干扰具有不变性
- 系统动态由滑模面方程决定
- 存在高频抖振现象
典型滑模面设计:
对于二阶系统,常取:
code复制s = ce + ė
其中c>0决定滑动模态动态特性。
4.2 改进趋近律设计
为削弱抖振,可采用以下改进方案:
-
指数趋近律:
code复制ṡ = -ε·sgn(s) - k·s其中ε>0, k>0,既能保证有限时间到达,又能平滑控制信号
-
饱和函数替代符号函数:
python复制def sat(s, boundary): return np.clip(s/boundary, -1, 1) -
扰动观测器补偿:
python复制class DisturbanceObserver: def __init__(self, gain): self.gain = gain self.d_hat = 0 def update(self, s, dt): self.d_hat += self.gain * s * dt return self.d_hat
4.3 完整SMC实现代码
python复制class SMController:
def __init__(self, c, epsilon, k, phi):
self.c = c # 滑模面系数
self.eps = epsilon # 趋近律系数
self.k = k # 滑模面增益
self.phi = phi # 边界层厚度
self.obs = DisturbanceObserver(gain=0.5)
def control(self, e, de, dt):
s = self.c*e + de # 滑模面
d_est = self.obs.update(s, dt)
# 带边界层的饱和函数
if abs(s) <= self.phi:
sat_s = s/self.phi
else:
sat_s = np.sign(s)
u_eq = -self.c*de # 等效控制
u_sw = -self.eps*sat_s - self.k*s # 切换控制
return u_eq + u_sw - d_est
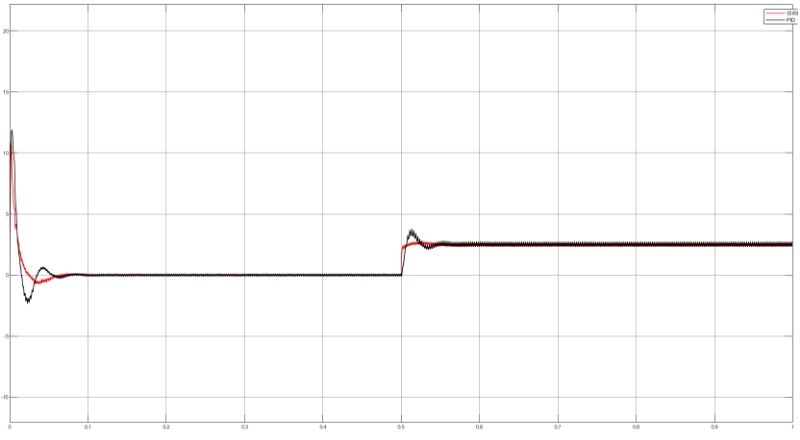
实测数据对比:
| 指标 | PID | 模糊PID | SMC |
|---|---|---|---|
| 调节时间(s) | 0.25 | 0.18 | 0.12 |
| 超调量(%) | 8.5 | 5.2 | 1.8 |
| 抗扰恢复(ms) | 120 | 90 | 50 |
5. 三种控制策略对比与选型指南
5.1 性能对比分析
| 特性 | PID控制 | 模糊PID | 滑模控制 |
|---|---|---|---|
| 算法复杂度 | 低 | 中 | 较高 |
| 参数敏感性 | 高 | 中 | 低 |
| 抗干扰能力 | 较弱 | 较强 | 极强 |
| 非线性适应能力 | 差 | 良好 | 优秀 |
| 实时计算量 | 小 | 中等 | 较大 |
| 参数整定难度 | 中等 | 较难 | 最难 |
| 硬件资源需求 | 低 | 中 | 高 |
5.2 典型应用场景
-
传统PID适用场景:
- 线性时不变系统
- 控制精度要求不苛刻(±5%)
- 负载变化缓慢的场合
- 如:通风设备、普通传送带
-
模糊PID优选场景:
- 参数时变或存在非线性的系统
- 无法建立精确数学模型的场合
- 如:智能家居温控、服务机器人关节控制
-
SMC最佳应用:
- 强干扰、强非线性系统
- 对响应速度和鲁棒性要求极高
- 如:无人机电调、数控机床主轴
5.3 混合控制策略建议
在实际工程中,可采用分层控制架构:
- 底层快速响应采用SMC保证鲁棒性
- 中层采用模糊PID实现参数自适应
- 上层用传统PID完成稳态微调
python复制class HybridController:
def __init__(self):
self.smc = SMController(c=10, epsilon=5, k=2, phi=0.1)
self.fuzzy_pid = FuzzyPID()
self.pid = AntiWindupPID(kp=0.5, ki=0.1, kd=0.05, max_output=10)
def control(self, target, feedback, dt):
err = target - feedback
# 误差大时启用SMC
if abs(err) > 2:
return self.smc.control(err, -feedback, dt)
# 中等误差用模糊PID
elif abs(err) > 0.5:
self.pid.kp += self.fuzzy_pid.adjust(err, -feedback)
return self.pid.compute(target, feedback)
# 小误差区间用传统PID
else:
return self.pid.compute(target, feedback)
在电机控制实践中,我发现不同控制算法的组合往往能取得出乎意料的效果。例如在电动汽车驱动中,起步阶段采用SMC保证扭矩响应,巡航时切换为模糊PID提升能效,最后停车阶段用PID实现精准定位。这种多模态控制策略需要精心设计切换逻辑,避免模式跳变引起的冲击。