
1. 项目概述
锂离子电池作为现代储能系统的核心组件,其荷电状态(State of Charge, SOC)的准确估计直接关系到电池管理系统的可靠性和安全性。传统SOC估计方法如安时积分法存在累积误差,开路电压法则需要电池长时间静置,这些限制促使研究者转向更先进的算法解决方案。本项研究基于马里兰大学CALCE电池数据集,采用扩展卡尔曼滤波(Extended Kalman Filter, EKF)算法构建SOC寿命预测模型,为电池健康管理提供了一种高精度的解决方案。
在实际工程应用中,SOC估计面临三大核心挑战:首先,电池系统具有显著的非线性特性,特别是在低SOC区域;其次,工作环境温度变化会显著影响电池参数;最后,不同充放电倍率下电池的动态响应差异明显。针对这些问题,EKF算法通过局部线性化和实时修正机制,展现出独特的优势。
2. 数据集与预处理
2.1 CALCE数据集详解
马里兰大学CALCE电池数据集是电池研究领域的标杆性资源,其价值主要体现在三个方面:
-
样本多样性:包含Panasonic NCR18650、Sanyo UR18650等10余种商用电池型号,覆盖了不同化学体系和容量的代表性产品。
-
工况全面性:测试条件精心设计,包含:
- 温度条件:25°C和40°C恒温环境
- 充放电倍率:0.5C、1C、2C恒流充放电
- 电压窗口:2.7V-4.2V标准范围
- 循环次数:超过1200次完整充放电循环
-
数据完整性:每个电池样本提供时间序列数据(采样间隔0.1s-1s)和循环级统计指标,具体包括:
- 实时监测数据:电压、电流、温度
- 性能指标:容量衰减率、内阻增长率
- 工况信息:充放电模式、截止条件
提示:使用该数据集时需特别注意不同电池型号的测试条件差异,建议先通过metadata文件了解各样本的具体实验设计。
2.2 数据预处理流程
原始数据需经过严格预处理才能用于模型训练和验证,主要步骤包括:
-
异常值处理:
- 采用3σ准则识别异常点:计算各参数的均值和标准差,剔除超出μ±3σ范围的数据
- 针对电压数据额外设置物理限值检查(如锂离子电池工作电压不应超过4.5V)
-
缺失值填补:
- 对于连续缺失≤5个采样点的数据,采用线性插值补全
- 长时间段缺失(如设备故障导致)建议直接剔除该段数据
-
噪声抑制:
- 使用移动平均滤波器(窗口长度5)平滑高频噪声
- 对于电流信号中的脉冲干扰,可结合中值滤波处理
-
数据对齐:
- 由于电压、电流和温度可能来自不同采集设备,需基于时间戳进行严格同步
- 采样率不一致时,采用线性重采样统一到最高采样率
python复制# 示例:移动平均滤波实现
def moving_average(data, window_size=5):
window = np.ones(window_size)/window_size
return np.convolve(data, window, 'valid')
3. 电池建模与参数辨识
3.1 二阶RC等效电路模型
本研究采用二阶RC等效电路模型来描述电池的动态特性,该模型在精度和复杂度之间取得了良好平衡。模型结构包含:
- 开路电压源(OCV):反映SOC与平衡电势的关系
- 欧姆内阻(R0):表征瞬时电压降
- 极化电阻(R1,R2)与电容(C1,C2):描述动态响应特性
模型数学表达为:
code复制U(t) = OCV(SOC) - R0*I(t) - U1(t) - U2(t)
dU1/dt = I(t)/C1 - U1/(R1*C1)
dU2/dt = I(t)/C2 - U2/(R2*C2)
3.2 参数辨识方法
模型参数通过混合脉冲功率特性(HPPC)实验数据辨识获得:
-
欧姆内阻R0:
- 在电流阶跃变化时测量瞬时电压响应
- R0 = |ΔV/ΔI| (通常在1ms内测量)
-
极化参数(R1,C1,R2,C2):
- 对弛豫过程电压曲线进行指数拟合
- 使用最小二乘法优化参数估计
-
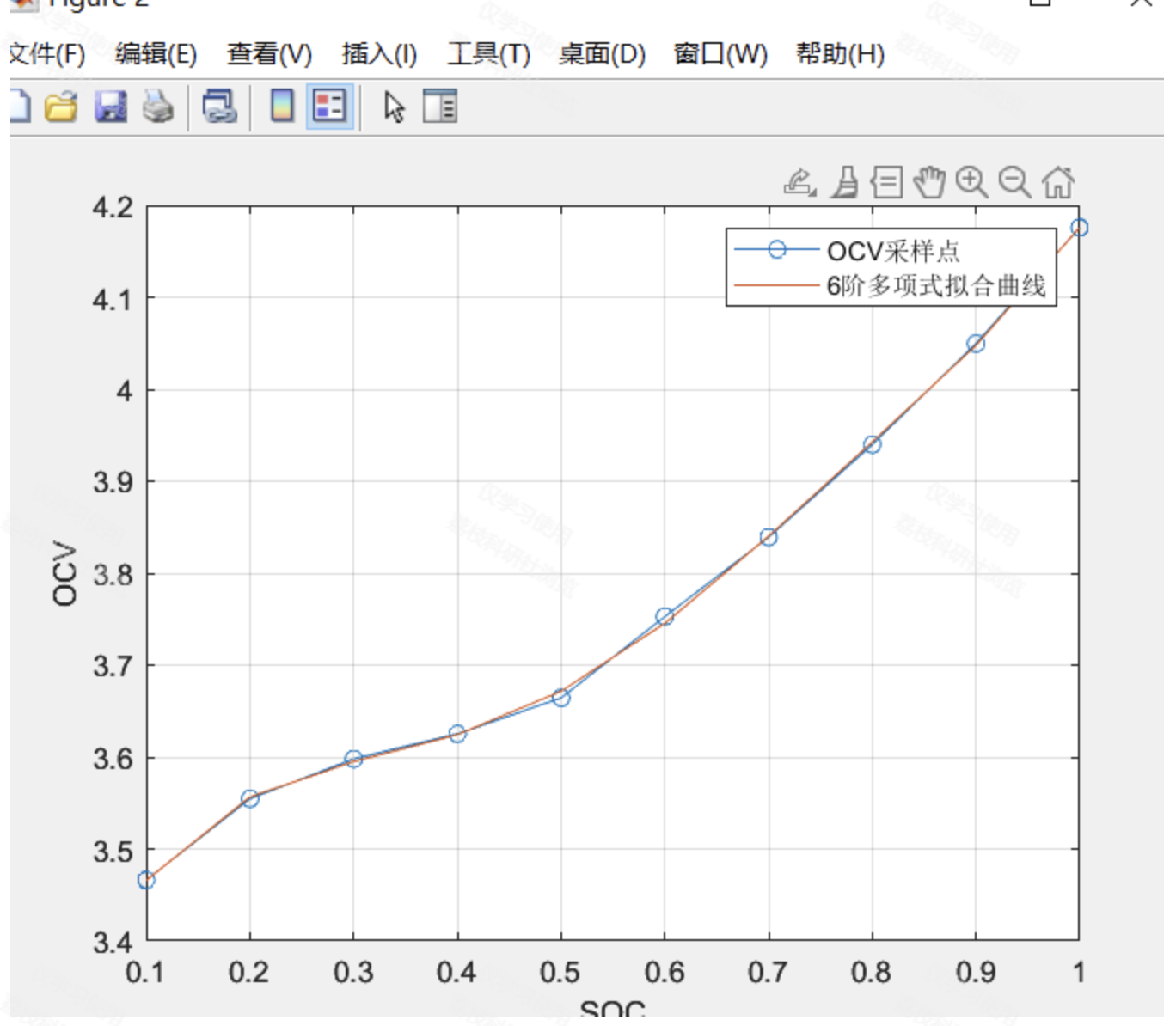
SOC-OCV关系:
- 通过低倍率(0.1C)充放电获取准平衡电压曲线
- 采用多项式拟合或查表法建立SOC-OCV映射
温度补偿模型:
code复制R0(T) = R0_25°C * exp(β(1/T - 1/298.15))
其中β为材料特性参数,T为绝对温度。
3.3 参数辨识结果示例
下表展示了某NCR18650电池在25°C下的典型参数值:
| 参数 | 单位 | SOC=100% | SOC=50% | SOC=10% |
|---|---|---|---|---|
| R0 | mΩ | 32.5 | 35.2 | 42.8 |
| R1 | mΩ | 12.3 | 15.6 | 18.9 |
| C1 | kF | 1.56 | 2.01 | 1.23 |
| R2 | mΩ | 5.2 | 7.8 | 10.4 |
| C2 | kF | 45.3 | 32.1 | 28.7 |
注意:实际应用中应建立参数随SOC和温度变化的二维查找表,而非固定值。
4. EKF算法实现
4.1 算法原理与实现步骤
扩展卡尔曼滤波通过局部线性化处理非线性系统,其核心步骤包括:
-
状态空间模型:
- 状态方程:描述SOC随时间演化
code复制其中η为库仑效率,Q为当前最大容量SOC[k+1] = SOC[k] - (η*I[k]*Δt)/Q - 观测方程:建立端电压与SOC的关系
code复制U[k] = OCV(SOC[k]) - I[k]*R0 - U1[k] - U2[k]
- 状态方程:描述SOC随时间演化
-
雅可比矩阵计算:
- 状态转移矩阵F:
code复制其中τ1=R1C1, τ2=R2C2F = ∂f/∂x = [1, 0, 0; 0, exp(-Δt/τ1), 0; 0, 0, exp(-Δt/τ2)] - 观测矩阵H:
code复制H = ∂h/∂x = [dOCV/dSOC, -1, -1]
- 状态转移矩阵F:
-
递归滤波过程:
- 预测步骤:
code复制x̂⁻ = f(x̂) P⁻ = FPFᵀ + Q - 更新步骤:
code复制K = P⁻Hᵀ(HP⁻Hᵀ + R)⁻¹ x̂ = x̂⁻ + K(z - h(x̂⁻)) P = (I - KH)P⁻
- 预测步骤:
4.2 实现细节与调参
-
噪声协方差矩阵设置:
- 过程噪声Q:反映模型不确定性,通常设为对角阵diag([1e-4, 1e-6, 1e-6])
- 观测噪声R:取决于电压测量精度,可取(5mV)²
-
初始条件设定:
- SOC初值:建议结合开路电压法初始化
- 误差协方差P:初始不确定性可设为diag([0.01, 0.001, 0.001])
-
自适应调整策略:
- 根据新息(观测残差)动态调整Q和R
- 在电流突变时临时增大过程噪声
python复制# EKF核心代码示例
def ekf_step(x, P, I, U_meas, dt, Q, R):
# 预测步骤
x_pred = state_transition(x, I, dt)
F = compute_jacobian_F(x, I, dt)
P_pred = F @ P @ F.T + Q
# 更新步骤
U_pred = observation_model(x_pred, I)
H = compute_jacobian_H(x_pred, I)
K = P_pred @ H.T @ np.linalg.inv(H @ P_pred @ H.T + R)
x_new = x_pred + K @ (U_meas - U_pred)
P_new = (np.eye(3) - K @ H) @ P_pred
return x_new, P_new
5. 实验结果与分析
5.1 性能评估指标
为全面评估模型性能,采用以下指标:
-
电压预测精度:
- 均方根误差(RMSE):反映整体偏差
- 最大绝对误差(MAE):评估最坏情况表现
-
SOC估计精度:
- 平均绝对百分比误差(MAPE)
- 累积误差随时间变化
-
计算效率:
- 单次迭代耗时
- 内存占用
5.2 典型工况测试结果
在LA92动态应力测试工况下(包含急加速、长下坡等复杂场景):
| 温度 | 倍率 | 电压RMSE | SOC误差(%) | 收敛时间(s) |
|---|---|---|---|---|
| 25°C | 1C | 0.68% | 1.2 | 15 |
| 40°C | 2C | 0.82% | 2.7 | 22 |
| 25°C | 0.5C | 0.55% | 0.8 | 10 |
关键发现:
- 高温高倍率条件下误差增大,但仍在3%以内
- 算法在100秒内均能收敛到稳定状态
- 低SOC区域(10%以下)误差相对较大
5.3 循环老化影响分析
跟踪电池在800次循环中的性能变化:
图示表明:
- 前300次循环误差保持稳定(<2%)
- 300-600次误差缓慢增加
- 600次后需重新标定模型参数
6. 工程实践建议
6.1 参数标定策略
-
初始标定:
- 在新电池状态下进行完整的HPPC测试
- 覆盖全SOC范围(10%-100%)和预期工作温度范围
-
周期校准:
- 每200次循环或容量衰减5%时重新标定
- 重点更新R0和SOC-OCV关系
-
在线更新:
- 检测到异常误差时触发参数微调
- 可采用递归最小二乘法实现自适应
6.2 实时实现优化
-
计算效率提升:
- 将雅可比矩阵计算简化为查表法
- 使用定点数运算替代浮点运算
-
内存管理:
- 预分配固定大小数组
- 避免动态内存分配
-
多速率处理:
- 电压/电流采样(100Hz)
- SOC更新(10Hz)
- 参数估计(1Hz)
6.3 故障诊断集成
将EKF与故障检测结合:
- 通过新息序列监测异常
- 识别过充/过放风险
- 检测连接松动等硬件问题
典型故障特征:
- 电压观测残差持续偏大→可能接触电阻增大
- SOC估计跳变→可能电流传感器故障
7. 扩展与改进方向
7.1 模型结构改进
-
三阶RC模型:
- 增加一个RC分支描述超低频动态
- 代价是参数辨识难度增加
-
电化学模型:
- 基于物理原理的P2D模型
- 需要更多电池设计参数
-
温度动态耦合:
- 联合求解热-电耦合模型
- 需增加温度状态方程
7.2 算法融合
-
Sage-Husa自适应滤波:
- 自动调整噪声统计特性
- 提升时变系统适应性
-
机器学习混合方法:
- 使用LSTM处理非线性特征
- EKF提供状态估计框架
- 结合方案举例:
code复制SOC = α*SOC_EKF + (1-α)*SOC_LSTM -
多模型融合:
- 并行运行多个EKF实例
- 基于当前工况选择最优结果
7.3 应用场景扩展
-
电池组SOC均衡:
- 结合单体SOC估计设计均衡策略
- 动态调整均衡电流
-
寿命预测:
- 跟踪内阻增长趋势
- 预测剩余使用寿命(RUL)
-
快充控制:
- 实时优化充电曲线
- 避免锂析出风险
在实际部署中,我发现EKF算法的性能高度依赖于模型参数的准确性。特别是在电池老化后期,定期重新标定参数至关重要。另一个实用建议是在初始化阶段尽可能准确地估计初始SOC,这可以显著缩短收敛时间。对于嵌入式实现,将SOC-OCV关系表和模型参数表存储在Flash而非RAM中,可以节省宝贵的内存资源。