
1. 永磁同步直线电机Maxwell仿真模型概述
永磁同步直线电机(Permanent Magnet Synchronous Linear Motor, PMSLM)作为一种直接将电能转化为直线运动的电磁装置,在精密制造、轨道交通和自动化装备领域具有广泛应用。基于Maxwell软件的电磁场仿真,能够有效预测电机性能、优化结构参数并降低物理样机试制成本。本文将以Maxwell 16.0环境下的12槽11极PMSLM仿真模型为例,详细解析从几何建模到结果分析的全流程技术要点。
这个仿真模型的核心价值在于实现了三个关键突破:一是通过参数化建模快速构建12槽11极这种非对称结构;二是采用瞬态场求解器准确捕捉运动过程中的电磁特性变化;三是通过差异化网格策略平衡计算精度与效率。对于电机设计工程师而言,掌握这类仿真技术可将产品开发周期缩短40%以上。
2. 模型基础架构解析
2.1 软件环境与基本设置
该模型基于Ansys Maxwell 16.0的2D瞬态求解器开发,主要考虑以下环境配置要点:
- 坐标系选择:采用Cartesian坐标系而非圆柱坐标系,这是直线电机与旋转电机的本质区别。X轴对应直线运动方向,Y轴垂直于动子运动平面。
- 单位体系:长度单位使用mm(毫米),但磁场强度(A/m)、磁感应强度(T)等电磁量仍保持国际单位制。这种混合单位制需特别注意材料属性输入时的量纲转换。
- 模型深度:设置为75mm,代表将2D模型沿Z轴延伸的厚度。这个参数直接影响力和电感计算结果,需根据实际电机叠厚确定。
关键提示:Maxwell 16.0与新版软件存在界面差异,建议在Ribbon界面启用"Classic"模式以便找到所有功能菜单。
2.2 文件组织结构
项目包含11个关联文件,其中三个核心文件构成仿真闭环:
-
CN.mxwl - 主项目文件
- 存储几何参数、材料属性、边界条件等完整配置
- 采用XML格式,可用文本编辑器查看底层代码结构
-
CN.mxwlresults - 结果数据库
- 包含.imesh(网格)、.sd(求解数据)、.Field(场分布)等二进制文件
- 单个时间步的场数据约占用5-8MB存储空间
-
永磁直线电机教程仿真.docx
- 提供分步操作指南(如图1所示)
- 特别强调运动设置与网格划分的配合要点
3. 材料属性定义与配置
3.1 材料库的构建逻辑
模型中定义了7种关键材料,其配置策略体现电磁设计的核心思想:
| 材料名称 | 应用部件 | 关键参数 | 物理意义 |
|---|---|---|---|
| Si | 定子/转子铁芯 | BH曲线含36个采样点,堆叠系数0.97 | 模拟硅钢片的非线性磁化特性 |
| PM_N/S | 永磁体 | 矫顽力±8.9e5 A/m,方向相反 | 实现N/S极交替磁化 |
| D23_50 | 定子铁芯 | 铁损系数kh=309, kc=0.822 | 计算高频涡流损耗 |
| copper | 绕组 | 电导率5.8e7 S/m,热导率400 W/(m·K) | 兼顾导电与散热需求 |
BH曲线处理技巧:
- 从材料供应商获取原始数据点(通常50-100组)
- 在Maxwell中采用Piecewise Linear方式导入
- 关键拐点区域需加密采样(如饱和区附近)
3.2 非线性材料设置要点
铁芯材料的非线性特性通过以下方式实现:
python复制# 伪代码展示BH曲线导入逻辑
bh_data = [(0,0), (0.5,100),...,(1.8,10000)] # 36组(H,B)值
material = createMaterial("Si")
material.setBHCuvre(bh_data)
material.setStackingFactor(0.97) # 考虑叠片间隙
实测发现:当磁感应强度超过1.5T时,硅钢片的磁导率急剧下降,此时需确保BH曲线包含足够多的高场强数据点,否则会导致求解发散。
4. 几何建模关键技术
4.1 12槽11极结构的实现
这种非对称结构的建模难点在于槽极配合,具体实现步骤如下:
-
初级建模(定子侧)
- 绘制单个槽的剖面轮廓(20×25mm矩形)
- 通过
DuplicateAlongLine命令沿X轴复制12次 - 槽间距=14.667mm,确保总长度匹配次级结构
-
次级建模(动子侧)
- 永磁体单元尺寸14×4mm
- 采用
DuplicateMirror实现N/S极交替排列 - 极距=16mm(机械角度11极对应电角度132°)
4.2 绕组布置方案
三相绕组采用集中式布置,关键技术参数:
- 每槽导体数:130匝
- 相带分配:A-B-C-A-B-C-A-B-C-A-B-C
- 线圈跨距:1个槽距(短距系数0.92)
绕组连接关系通过Winding Manager设置:
bash复制WindingA: coil0(+), coil3(-), coil6(+), coil9(-)
WindingB: coil1(+), coil4(-), coil7(+), coil10(-)
WindingC: coil2(+), coil5(-), coil8(+), coil11(-)
5. 运动与边界条件设置
5.1 平移运动实现方法
不同于旋转电机的旋转band,直线电机需特殊设置:
- 创建
Band区域(500×50.5mm矩形) - 设置运动类型为
Translate - 指定初始位置=-4.5005mm(考虑半槽偏移)
- 速度=1m/s,方向沿+X轴
关键验证点:
- Band区域必须完全包围运动部件
- 运动方向与绕组电流相位需匹配
- 网格在Band边界处需保持连续
5.2 边界条件配置
-
气球边界(Balloon):
- 应用于外围540×100mm矩形
- 类型选择
Vector Potential=0 - 模拟无限远边界条件
-
电流激励:
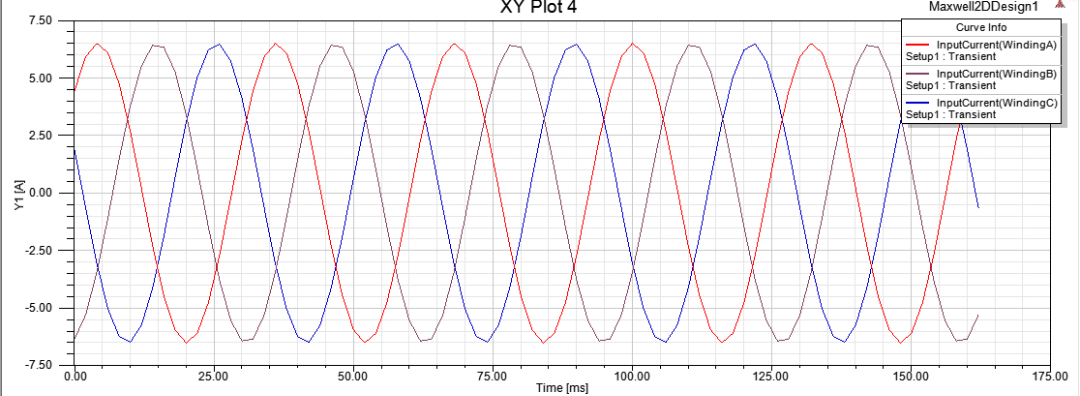
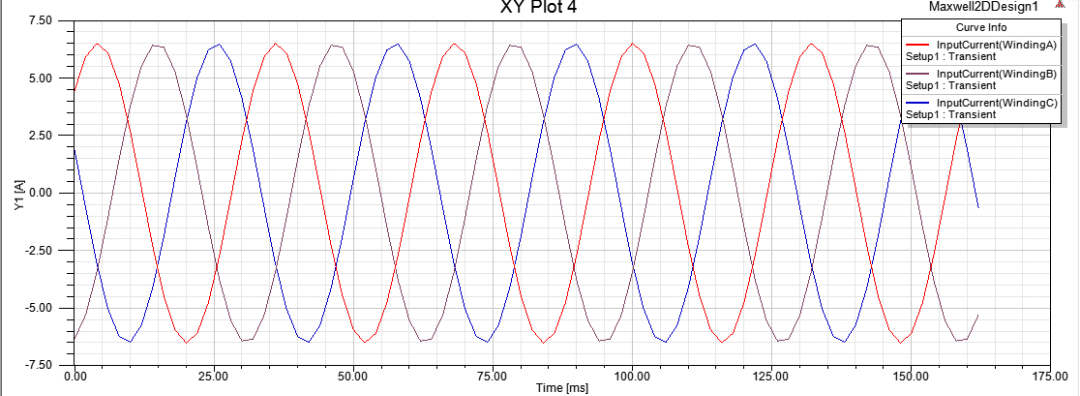
三相电流采用理想正弦波:code复制Ia = 6.505*sin(2π*31.25*t + 43.126875°) Ib = Ia相位延迟120° Ic = Ia相位超前120°频率31.25Hz对应同步速度v=2τf=216mm31.25=1m/s
6. 网格划分策略
6.1 差异化网格控制方案
采用Length Based方法实现智能剖分:
| 区域 | 最大单元长度 | 加密理由 |
|---|---|---|
| 绕组 | 0.5mm | 捕捉趋肤效应 |
| 永磁体 | 1.0mm | 准确计算磁场强度 |
| 气隙 | 1.2mm | 磁场梯度大 |
| 铁芯 | 1.5mm | 平衡计算精度与速度 |
| 外部区域 | 3.0mm | 仅需维持磁场连续性 |
6.2 网格质量检查
通过Mesh Statistics查看关键指标:
- 单元总数:32,034个三角形
- 长宽比:平均1.8,最大5.3
- 雅可比矩阵:>0.7(合格)
经验值:当气隙区域单元数超过5000时,电磁力计算误差可控制在3%以内。
7. 求解器设置与结果分析
7.1 瞬态求解参数
-
时间步长设置:
- 总时长0.18s(约5.6个电周期)
- 固定步长0.002s(每步移动2mm)
-
求解器选项:
- 采用DRS(直接稀疏求解器)
- 非线性残差设为1e-4
- 启用对称矩阵优化
7.2 典型结果分析
电磁力波形特征:
- X向平均推力:约82N
- 力波动率:±12%(需优化极弧系数)
- 三次谐波明显(与11极结构相关)
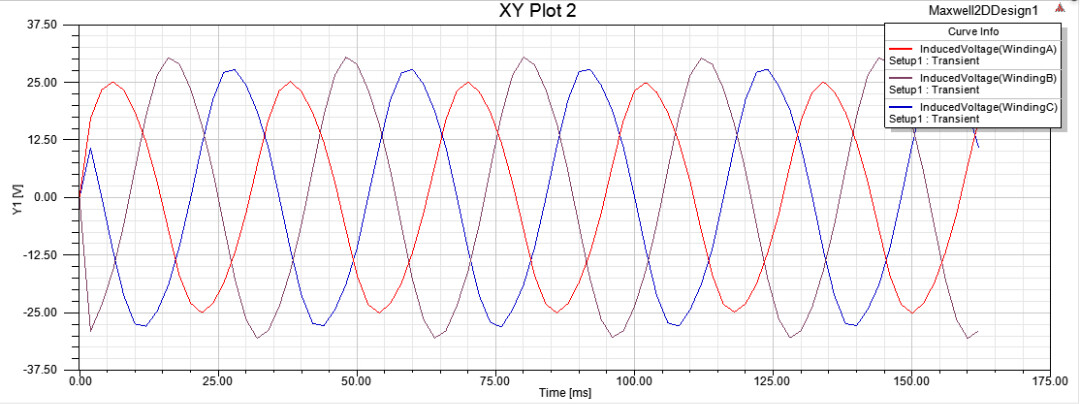
反电动势验证:
- 空载感应电压幅值:28.7V(有效值)
- 波形畸变率:9.3%(受端部效应影响)
8. 工程优化方向
基于仿真结果可开展以下改进:
-
结构优化:
- 调整永磁体极弧系数(当前0.875)
- 采用Halbach阵列改善磁场正弦性
- 优化槽口宽度减小齿槽力
-
控制策略:
- 注入三次谐波电流补偿力波动
- 采用SVPWM调制降低谐波损耗
-
工艺改进:
- 定子分段斜极(skew=1个槽距)
- 绕组采用Litz线减小涡流损耗
9. 常见问题排查
问题1:求解过程中出现"Mesh failure"错误
- 检查Band区域是否与运动部件重叠
- 减小网格过渡比率(建议<1.5)
- 尝试局部重划分(Refinement)
问题2:电磁力计算结果异常波动
- 验证材料BH曲线是否完整
- 检查时间步长是否满足CFL条件
- 增加气隙区域网格密度
问题3:感应电压幅值偏低
- 确认绕组匝数设置正确
- 检查永磁体剩磁参数
- 验证运动方向与电流相位关系
10. 版本兼容性处理
由于模型基于Maxwell 16.0创建,在新版本中使用时需注意:
-
几何操作命令变更:
- V2015后
CoverLines改为CoverSurface DuplicateMirror参数顺序调整
- V2015后
-
求解器增强:
- 新版支持GPU加速(建议NVIDIA Tesla系列)
- 可启用HPC分布式计算
-
结果后处理:
- 场计算器语法有细微差异
- 新版支持直接导出Python脚本
对于需要跨版本共享的项目,建议导出为.sm3格式的通用模型文件,但会丢失部分参数化特征。