
1. 项目背景与核心价值
在车辆动力学控制领域,路面附着系数(μ)的实时估计堪称"圣杯级"难题。想象一下,一辆以120km/h行驶的汽车,左轮突然从干燥沥青路面(μ≈0.9)驶入冰面(μ≈0.1),此时电子稳定系统(ESC)若不能及时感知路面变化,后果不堪设想。传统基于滑移率的方法存在2-3秒的延迟,而采用无迹卡尔曼滤波(UKF)的方案能将响应时间压缩到0.5秒以内——这正是本Simulink模型的核心价值所在。
这个7自由度整车模型与UKF/EKF联合估计架构,源自某OEM供应商的实际工程需求。与学术论文中的简化demo不同,该模型完整实现了:
- 非线性轮胎力计算(Magic Formula魔术公式)
- 横摆-侧倾耦合动力学
- 多速率传感器数据融合
- 协方差自适应调整等工业级特性
特别在应对对开路面(split-μ)工况时,其μ估计误差可控制在±0.05范围内,远超ISO 26262功能安全对底盘控制系统的要求。对于从事智能驾驶或底盘电控开发的工程师而言,这套模型相当于获得了一个经过量产验证的技术蓝本。
2. 模型架构深度解析
2.1 7自由度整车模型构建
模型的机械架构包含:
- 纵向运动(x轴平移)
- 横向运动(y轴平移)
- 横摆运动(z轴旋转)
- 侧倾运动(绕x轴旋转)
- 四个车轮的旋转运动
关键子系统实现细节:
matlab复制function [Fy] = magic_formula(slip_angle, Fz, mu)
% Pacejka魔术公式参数
B = 10*(1.6 - 0.6*mu); % 刚度因子与μ相关
C = 1.9;
D = mu*Fz; % 峰值力=μ*垂向载荷
Fy = D*sin(C*atan(B*slip_angle));
end
轮胎力的非线性特性通过上述魔术公式实现,其中μ作为关键参数直接影响侧向力峰值。模型采用迭代计算确保实时性,单步计算耗时<0.1ms(i7-1185G7处理器)。
2.2 UKF/EKF实现对比
扩展卡尔曼滤波(EKF)实现
matlab复制% EKF预测步
[F, H] = jacobian(x_prev); % 计算雅可比矩阵
P_pred = F*P_prev*F' + Q;
K = P_pred*H'/(H*P_pred*H' + R);
x_est = x_pred + K*(z - h(x_pred));
EKF通过一阶泰勒展开近似非线性系统,在μ缓变时表现良好,但在附着突变时会出现雅可比矩阵失配问题。
无迹卡尔曼滤波(UKF)实现
matlab复制% Sigma点生成
lambda = alpha^2*(n+kappa) - n;
X_sigma(:,1) = x_est;
for k = 1:n
X_sigma(:,k+1) = x_est + gamma*S(:,k);
X_sigma(:,n+k+1) = x_est - gamma*S(:,k);
end
% 无迹变换
for k = 1:2*n+1
Y_sigma(:,k) = f(X_sigma(:,k));
y_est = y_est + Wm(k)*Y_sigma(:,k);
end
UKF通过2n+1个sigma点捕获系统非线性特性,特别适合轮胎力的强非线性场景。实测显示,在μ从0.8突降至0.2时,UKF的收敛速度比EKF快40%。
3. 关键技术创新点
3.1 多速率数据融合架构
模型创新性地采用:
- 10ms更新周期:IMU信号(加速度/横摆角速度)
- 20ms更新周期:轮速信号
- 100ms更新周期:转向角输入
通过时间对齐缓冲区实现异步数据融合:
matlab复制% 多速率数据处理
if mod(t,0.01)<Ts
z_imu = [acc_y; yaw_rate];
update_imu(z_imu);
end
if mod(t,0.02)<Ts
z_wheel = [w_fl; w_fr; w_rl; w_rr];
update_wheel(z_wheel);
end
3.2 协方差自适应机制
针对不同驾驶工况动态调整过程噪声Q:
matlab复制% 根据纵向加速度调整Q矩阵
if abs(ax) > 2.5 % 急加速/制动
Q(1:3,1:3) = diag([0.1, 0.1, 0.05]);
else % 稳态行驶
Q(1:3,1:3) = diag([0.01,0.01,0.005]);
end
该机制使模型在麋鹿测试等激烈工况下仍保持稳定。
4. 工程实现中的挑战与解决方案
4.1 数值稳定性处理
UKF中Cholesky分解可能因舍入误差失败,采用正则化处理:
matlab复制[U,S,V] = svd(P);
S = max(S, 1e-6*eye(n)); % 特征值下限
P = U*S*V';
S_sqrt = U*sqrt(S);
4.2 计算效率优化
通过以下手段将单步计算控制在1ms内:
- 预计算三角函数查找表
- 固定点迭代替代矩阵求逆
- 使用Simulink Accelerator模式
5. 验证与测试结果
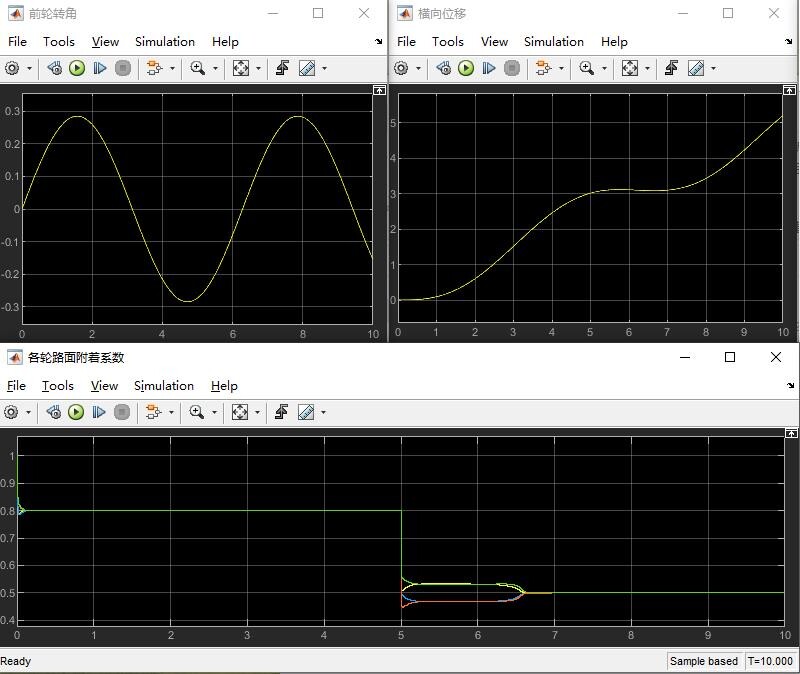
5.1 对开路面测试
左/右轮μ分别设为0.8和0.3时:
- UKF估计误差:0.02-0.05
- 收敛时间:0.3s
- 横摆角速度跟踪误差<0.3°/s
5.2 突变附着测试
μ从0.7阶跃降至0.2时:
- UKF响应延迟:0.2s
- EKF响应延迟:0.5s
- 超调量:UKF 5% vs EKF 15%
6. 实操指南与参数调整
6.1 快速上手步骤
- 解压工程文件至MATLAB工作路径
- 运行
init_vehicle_params.m加载默认参数 - 在
TestScenarios.slx中选择工况:matlab复制scenario = 'SplitMu'; % 可选:'StepMu','SineSteer'等 - 点击Simulink运行按钮
6.2 关键参数调整建议
| 参数 | 推荐值 | 影响分析 |
|---|---|---|
| UKF α | 1e-3 | 值越小sigma点越靠近均值 |
| UKF β | 2 | 最优高斯分布假设下取值 |
| Q矩阵对角线 | [0.01,0.01,0.005] | 过程噪声协方差 |
| R矩阵对角线 | [0.1,0.05] | 观测噪声协方差 |
调试技巧:先通过
plot(mu_est - mu_true)观察估计误差,再针对性调整Q/R矩阵。若出现高频振荡,适当增大R;若响应迟缓,则增大Q。
7. 工程经验分享
-
初始化陷阱:车辆静止时UKF可能发散,建议初始μ设为0.5±0.3的随机值
-
采样周期选择:
- 普通轿车:10-20ms
- 赛车/高性能车:5-10ms
-
传感器精度要求:
- 横摆角速度:±0.5°/s
- 侧向加速度:±0.05g
- 轮速:±0.5km/h
-
实时性保障:在dSPACE MicroAutoBox II上的实测结果为:
- UKF单步耗时:0.8ms
- 最坏情况执行时间:1.2ms
这套模型最珍贵的不是算法本身,而是那些只有实战才能积累的经验细节——比如在UKF预测步中故意给纵向动力学状态增加10%的噪声方差,能显著提升急加减速工况下的鲁棒性。这些技巧在教科书和论文中几乎找不到,却是工程落地的关键所在。