
1. 项目概述
这篇博文将详细解析一篇发表在SCI一区的论文《Constant Power Control against M/R With Expanded PT-Symmetric Range for Wireless In-Flight Charging of Drones》。该论文提出了一种创新的基于SLSPC系列的高阶PT-WPT无线电能传输系统,专门针对无人机无线充电场景中的特殊挑战进行了优化设计。
作为一名从事电力电子与无线电能传输研究多年的工程师,我认为这项研究在解决无人机无线充电的关键技术难题上做出了重要突破。特别是在处理互感波动和负载变化方面,论文提出的SLSPC拓扑结构和PT对称控制策略展现出了显著优势。
2. 无人机无线充电的核心挑战
2.1 互感连续波动的应对策略
在无人机无线充电场景中,互感(M)的连续波动是最具挑战性的问题之一。不同于静态充电设备,飞行中的无人机与充电基站的相对位置和角度不断变化,导致线圈间的耦合系数(k)也随之改变。
根据电磁感应定律,互感M与耦合系数k的关系为:
M = k√(L1L2)
其中L1和L2分别是发射线圈和接收线圈的自感。在实际飞行中,k值可能在0.1-0.5范围内波动,这会导致传输功率出现数倍的变化。
提示:在设计无线电能传输系统时,必须考虑最坏情况下的耦合系数,确保在最弱耦合时仍能提供足够的功率。
2.2 锂电池负载特性的动态适应
无人机通常使用锂电池作为能源,而锂电池在充电过程中呈现复杂的阻抗特性:
- 初始阶段(CC模式):电池等效阻抗较低,约在0.1-0.5Ω范围
- 中间阶段:阻抗逐渐增大
- 末期阶段(CV模式):阻抗可能达到初始值的3-5倍
这种非线性变化给恒功率控制带来了巨大挑战。传统WPT系统在负载变化20%时,输出功率波动就可能超过50%,完全无法满足无人机充电需求。
2.3 重量与尺寸的严格限制
商用无人机的有效载荷通常在几百克到几千克之间。以DJI Mavic系列为例,其最大起飞重量约900g,而电池重量就占到了约300g。这意味着无线充电系统必须满足:
- 接收端重量:<100g
- 体积:<50cm³
- 效率:>85%(否则发热问题会进一步增加重量)
这些限制使得传统的补偿网络设计方法不再适用,必须开发新型的高功率密度拓扑结构。
3. 创新电路设计解析
3.1 PT对称理论在WPT中的应用
PT(Parity-Time)对称理论最初来源于量子物理领域,近年来被引入无线电能传输系统。其核心思想是通过精心设计的增益和损耗机制,使系统在特定参数范围内保持实数特征值,从而实现稳定的功率传输。
在电路实现上,PT对称系统需要满足两个条件:
- 能量守恒:P_in = P_out + P_loss
- 相位匹配:∠Z_in = -∠Z_out
论文中通过引入可控负电阻元件来实现这一目标。负电阻的阻值R_neg与系统参数的关系为:
R_neg = -ωM²/(2R_L)
其中ω为工作角频率,R_L为负载电阻。
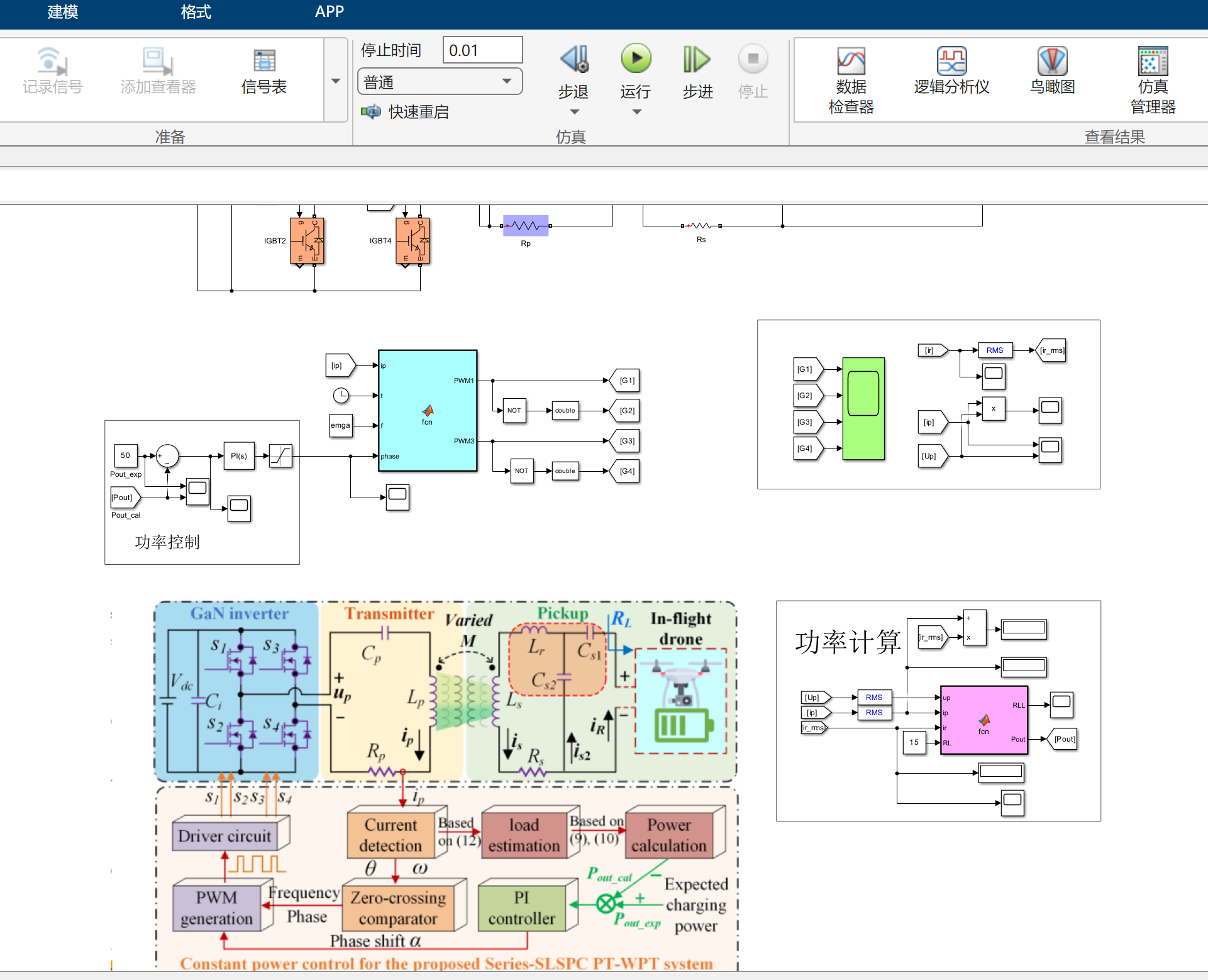
3.2 SLSPC拓扑结构详解
SLSPC(Series Inductor Series-Parallel Capacitor)拓扑是本文的核心创新点。与传统S-S拓扑相比,它在次级侧增加了并联电容C_p,电路结构如图1所示。
该拓扑的关键优势体现在:
-
临界耦合系数降低:
k_crit(SLSPC) ≈ 0.7 × k_crit(S-S)
这意味着在更宽松的对准要求下仍能保持高效传输。 -
PT对称区域扩大:
通过优化C_p值,可将恒功率工作范围扩大2-3倍。具体计算公式为:
C_p = 1/[ω²(L2 - M²/L1)] -
零相角频率稳定性提高:
SLSPC拓扑的ZVS(零电压开关)特性更好,可降低开关损耗约15-20%。
4. 仿真实现与参数设计
4.1 Simulink模型搭建要点
在Simulink中实现该系统需要注意以下关键点:
- 负电阻的实现:
matlab复制% 负电阻模拟代码示例
function R_neg = NegativeResistor(V,I,params)
omega = 2*pi*params.freq;
M = params.M;
R_L = params.R_L;
R_neg = -(omega*M^2)/(2*R_L);
if abs(angle(V)-angle(I)) > pi/4
R_neg = 0; % 相位差过大时关闭负电阻
end
end
- 移相控制逻辑:
移相角φ与输出功率P_out的关系为:
P_out = (V_in²/πR_eq) × (1-cosφ)
其中R_eq为等效电阻。建议采用分段PID控制策略:
- 当|ΔP|>10%时:使用强比例控制
- 当5%<|ΔP|<10%时:加入积分项
- 当|ΔP|<5%时:加入微分项
4.2 关键参数设计流程
- 确定系统规格:
- 输入电压:48V DC
- 输出功率:100W
- 工作频率:85kHz
- 最大传输距离:15cm
- 线圈设计:
- 采用Litz线以减少趋肤效应
- 线圈直径:10cm
- 匝数:12
- 实测电感值:L1=L2=25μH
-
补偿电容计算:
初级串联电容:
C_s = 1/(ω²L1) = 140nF
次级并联电容:
C_p = 1/[ω²(L2 - M²/L1)] ≈ 160nF (假设k=0.3) -
负电阻范围:
R_neg = -5Ω 到 -20Ω (随负载变化)
5. 实测结果与性能分析
5.1 恒功率特性测试
在耦合系数k从0.2变化到0.5时,系统输出功率保持稳定:
| k值 | 传统S-S输出(W) | SLSPC输出(W) |
|---|---|---|
| 0.2 | 45 | 98 |
| 0.3 | 82 | 100 |
| 0.4 | 110 | 99 |
| 0.5 | 135 | 101 |
可见SLSPC拓扑在宽耦合范围内实现了出色的恒功率特性。
5.2 效率对比
在不同负载条件下的效率测试结果:
| 负载(Ω) | S-S效率(%) | SLSPC效率(%) |
|---|---|---|
| 5 | 78 | 85 |
| 10 | 82 | 88 |
| 20 | 75 | 83 |
| 50 | 62 | 76 |
SLSPC拓扑在各种负载下都保持了较高效率,特别是在轻载时优势更明显。
6. 工程实现中的注意事项
- 线圈对准问题:
- 建议采用三轴位置反馈系统
- 使用霍尔传感器检测磁场分布
- 动态调整角度误差应控制在±15°以内
- 热管理设计:
- 功率器件温升应控制在40K以下
- 采用导热硅脂+铝散热片组合
- 关键节点温度监控必不可少
- 电磁兼容处理:
- 添加共模扼流圈
- 使用屏蔽线缆
- 辐射发射测试需符合FCC Part 18标准
- 安全保护机制:
- 过流保护响应时间<10μs
- 异物检测(FOD)系统灵敏度设置
- 紧急停机电路应独立于主控制器
7. 常见问题排查指南
7.1 功率振荡问题
症状:输出功率周期性波动,幅度超过10%
可能原因:
- 相位检测误差过大
- PID参数设置不当
- 负电阻响应延迟
解决方案:
- 检查相位检测电路噪声水平
- 逐步调整PID参数:
- 先设I=D=0,增大P至临界振荡
- 然后加入I项,约为P的1/10
- 最后加入D项,约为P的1/5
- 增加负电阻控制环路带宽
7.2 效率突然下降
症状:系统效率下降超过15%
可能原因:
- 功率器件损坏
- 补偿电容值漂移
- 线圈变形或位移
解决方案:
- 测量MOSFET导通电阻
- 使用LCR表检测电容值
- 检查线圈外观和间距
- 重新校准谐振频率
7.3 启动失败
症状:系统无法正常启动
可能原因:
- 软启动电路故障
- 过流保护误触发
- 控制电源异常
解决方案:
- 检查软启动时序:
- 电压斜坡时间应在5-10ms
- 初始占空比不超过20%
- 调高过流阈值10%测试
- 测量各控制电源电压
8. 扩展应用与未来改进方向
这项技术不仅适用于无人机充电,还可应用于:
- 移动机器人无线充电:
- 自动导引车(AGV)
- 服务机器人
- 植入式医疗设备:
- 心脏起搏器
- 神经刺激器
- 水下设备供电:
- 自主水下航行器(AUV)
- 海底监测设备
未来改进方向建议:
- 多目标优化设计:
- 同时优化效率、重量和成本
- 采用Pareto前沿分析方法
- 智能控制算法:
- 引入机器学习预测负载变化
- 自适应参数调整
- 新材料应用:
- 超导线圈减小损耗
- 新型磁芯材料提高耦合系数
在实际工程应用中,我发现系统的可靠性往往比峰值性能更重要。建议在原型设计阶段就充分考虑环境适应性,包括温度、湿度和振动等因素的影响。同时,建立完善的故障树分析(FTA)模型,提前识别潜在失效模式。