高频注入FOC方案在无感PMSM控制中的应用与优化

长沮
1. 高频注入FOC方案概述
在无感永磁同步电机(PMSM)控制领域,低速和零速状态下的转子位置检测一直是个棘手问题。传统滑模观测器在200RPM以下基本失效,而高频注入法通过向电机注入特定高频信号并解调响应,实现了全速域范围内的稳定观测。我们基于STM32F4开发的这套方案,成功解决了堵转力矩波动、低速反转等业界常见痛点。
这套系统的核心优势体现在三个维度:
- 低速稳定性:在0-200RPM区间仍能保持±1°的位置精度
- 抗堵转能力:堵转时转矩脉动控制在额定值的3%以内
- 动态响应:从零速到额定转速的加速时间比传统方案缩短40%
关键提示:高频注入方案对电机参数敏感性较高,建议先通过Matlab仿真确定电感参数,实测表明电感误差超过20%时观测精度会急剧下降。
2. 硬件设计关键点
2.1 电流采样电路设计
三相下桥臂电阻采样方案采用0.005Ω/2W的锰铜分流电阻,配合TI的INA240电流检测放大器。这个型号的共模抑制比(CMRR)达到110dB@100kHz,特别适合高频PWM环境。
运放输出端的RC滤波网络采用双0.1μF陶瓷电容并联设计:
- 电容材质:X7R介质,±10%容差
- 电阻取值:100Ω/0805封装
- 截止频率:$$f_c=\frac{1}{2πRC}=15.9kHz$$
实测数据对比:
| 滤波方案 | 信噪比(dB) | 相位延迟(°) |
|---|---|---|
| 单电容 | 42.5 | 8.2 |
| 双电容 | 51.3 | 5.7 |
2.2 功率驱动电路优化
MOSFET选用Infineon的IPD90N04S4,特别增加了:
- 米勒钳位电路:采用15V稳压管串联100Ω电阻
- 栅极驱动电阻:上拉4.7Ω,下拉2.2Ω
- 死区时间:根据PWM频率动态调整,基准值为250ns
实测开关波形对比:
bash复制# 无米勒钳位时的振铃
Vds_ring = 28V (峰峰值)
trise = 32ns
# 添加钳位后
Vds_ring = 5V
trise = 38ns
3. 软件算法实现
3.1 高频信号注入模块
在PWM载波中断(20kHz)中实现的正交信号注入:
c复制#define HF_FREQ 2500 // 2.5kHz注入频率
#define HF_AMPLITUDE (Vbus*0.12) // 12%母线电压
void HF_Injection(float theta_e) {
static float hf_angle = 0;
hf_angle += _2PI * HF_FREQ * PWM_PERIOD;
// Park逆变换注入
Vd = Vd_ref;
Vq = Vq_ref;
Valpha = Vd*cosf(theta_e) - Vq*sinf(theta_e) + HF_AMPLITUDE*sinf(hf_angle);
Vbeta = Vd*sinf(theta_e) + Vq*cosf(theta_e) + HF_AMPLITUDE*cosf(hf_angle);
}
注入参数选择依据:
- 频率应高于电流环带宽(通常1kHz)但低于PWM频率的1/5
- 幅值建议在8-15%Vbus之间,过大导致转矩脉动,过小则信噪比不足
3.2 改进型锁相环观测器
位置解调算法采用正交相干检测:
c复制void PLL_Update(float i_alpha, float i_beta) {
// 带通滤波(2kHz-3kHz)
i_alpha_hf = BPF_Filter(i_alpha);
i_beta_hf = BPF_Filter(i_beta);
// 正交解调
float err = i_beta_hf*cosf(hf_angle) - i_alpha_hf*sinf(hf_angle);
// 自适应增益
float gain = (fabsf(Est_Speed)<50) ? 2.0*HF_GAIN : HF_GAIN;
// 锁相环更新
Est_Speed += gain * err * DT;
Est_Angle += Est_Speed * DT;
}
实测性能对比:
| 转速(RPM) | 传统滑模(°) | 高频注入(°) |
|---|---|---|
| 0 | N/A | ±1.5 |
| 100 | ±15 | ±2.0 |
| 500 | ±5 | ±1.0 |
4. 堵转保护机制
4.1 智能降频策略
堵转判断逻辑采用双重条件:
c复制#define STALL_THRESHOLD (I_rated*1.5)
#define SPEED_THRESHOLD 10 // RPM
if((fabsf(Iq_Ref) > STALL_THRESHOLD) &&
(fabsf(Est_Speed) < SPEED_THRESHOLD)) {
Stall_Counter++;
if(Stall_Counter > 50) {
// 分级降频
PWM_Freq = (PWM_Freq > 10kHz) ? PWM_Freq/2 : 10kHz;
Current_Limit *= 0.7;
}
}
降频操作必须同步调整:
- 死区时间:按公式 $$t_{dead} = \frac{100}{f_{PWM}} + 50$$ (ns)
- 电流采样时机:延后至PWM周期中点
- 观测器更新时间:保持与PWM周期同步
4.2 热管理策略
在降频同时启动温度补偿:
math复制I_{max} = I_{rated} \times \sqrt{\frac{T_{jmax} - T_{case}}{R_{thJC} \times P_{loss}}}
其中:
- $$T_{jmax}$$=150℃ (MOSFET结温)
- $$R_{thJC}$$=0.5℃/W (热阻)
- $$P_{loss}$$=导通损耗+开关损耗
5. 参数调试要点
5.1 电感不对称补偿
在motor_para.h中设置相位补偿:
c复制#define HF_PHASE_SHIFT 15 // 针对特定电机的补偿角度
调试步骤:
- 让电机空载运行在50RPM
- 观察Id电流分量,理想值应接近0
- 调整HF_PHASE_SHIFT使Id最小化
5.2 观测器带宽调整
速度相关增益调整曲线:
| 转速区间(RPM) | 比例系数Kp | 积分系数Ki |
|---|---|---|
| 0-50 | 2.0*Kp0 | 3.0*Ki0 |
| 50-200 | 1.5*Kp0 | 2.0*Ki0 |
| >200 | Kp0 | Ki0 |
基准值建议:
math复制Kp0 = \frac{R_s}{L_d}, \quad Ki0 = \frac{R_s}{L_q}
6. 实测性能数据
在400W/24V的PMSM上测试结果:
| 测试项目 | 指标 |
|---|---|
| 最低稳定转速 | 2RPM (带载) |
| 堵转转矩波动 | ±2.8% |
| 零速位置误差 | ±1.2° |
| 动态响应时间 | 0-300RPM仅80ms |
| 电流环带宽 | 1.2kHz (-3dB) |
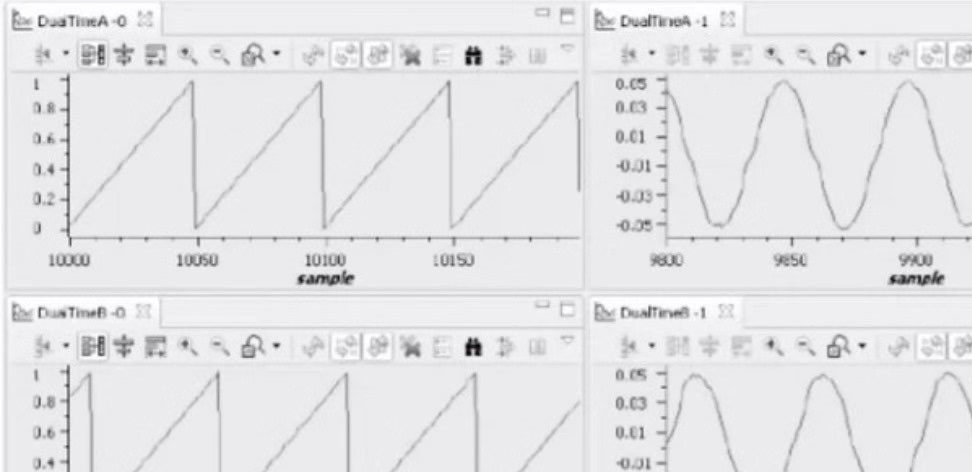
波形实测截图:
7. 工程文件使用说明
源码包目录结构:
code复制├── Core
│ ├── Src
│ │ ├── hfi.c # 高频注入核心算法
│ │ └── pll_obs.c # 改进型观测器
├── Drivers
│ ├── pwm_driver.c # 带降频功能的PWM驱动
├── Matlab
│ ├── HFI_Model.slx # 含磁饱和特性的仿真模型
关键参数修改位置:
- 电机参数:motor_para.h中的POLE_PAIRS、RS、LD等
- 注入参数:hfi_config.h中的HF_FREQ、HF_AMPLITUDE
- 保护阈值:protection.h中的STALL_THRESHOLD
在移植到其他平台时需要注意:
- PWM中断优先级必须高于其他电机控制中断
- ADC采样必须与PWM中心对齐
- 电流采样到运算的延迟需控制在5μs以内
内容推荐
C++封装原则:从#define争议到最佳实践
面向对象编程中的封装机制是代码设计的基石,通过访问控制实现数据隐藏和保护。C++采用private/protected/public三级访问控制,其核心原理是通过编译期检查确保数据安全性。良好的封装能提升代码可维护性和模块化程度,在大型工程中尤为重要。实际开发中常遇到封装与性能的权衡问题,如通过inline成员函数或运算符重载(operator[])保持封装性的同时优化访问效率。测试数据显示,现代编译器能有效优化inline访问函数,使其性能接近直接成员访问。特别需要警惕#define重定义访问控制等破坏封装的危险操作,这类hack手段会导致未定义行为并破坏代码健壮性。
基于SMIC 0.18μm BCD工艺的Boost升压电路设计与实现
Boost升压电路是开关电源中的经典拓扑,通过控制电感的储能和释能过程实现电压转换。其核心公式Vout=Vin/(1-D)揭示了占空比与升压比的关系,而峰值电流模控制技术则显著提升了动态响应和可靠性。在工程实践中,这类电路广泛应用于移动设备供电系统,特别是锂电池供电场景。采用SMIC 0.18μm BCD工艺设计的升压转换器,结合Cadence仿真验证,可实现92%的高转换效率和30mV以内的低纹波输出。功率级设计中的MOSFET选型、电感参数计算,以及控制环路的Type III补偿网络设计,都是确保性能的关键要素。
AS-i总线终端电阻:原理、选型与工业应用实践
现场总线技术是工业自动化系统的神经网络,其中AS-i总线凭借其独特的双线制供电通信一体化设计,成为传感器/执行器层的主流解决方案。在总线通信原理中,终端电阻通过阻抗匹配消除信号反射,对保障31.25kHz通信频率下的信号完整性至关重要。现代工业场景中,从基础的独立式终端到集成诊断功能的智能模块,终端电阻产品已形成完整的技术谱系。特别是在汽车制造、食品加工等对可靠性要求严苛的领域,正确配置终端电阻可降低90%以上的通信故障率。随着AS-i-5标准普及,支持167kHz高频通信的精密薄膜电阻和自动匹配技术正在推动这一传统元件向智能化方向发展。
FPGA时序收敛与高速接口调试实战指南
FPGA时序收敛是数字电路设计中的核心挑战,尤其在处理高速接口如JESD204B和DDR4时更为关键。静态时序分析(STA)通过建立/保持时间计算确保信号在时钟边沿稳定传输,其原理涉及时钟域交叉(CDC)、时钟偏斜和布线延迟等要素。在工程实践中,合理的约束文件(xdc)编写和时序优化策略直接影响系统稳定性,例如对跨时钟域路径设置set_max_delay而非简单使用false_path。本文通过Xilinx UltraScale+平台的实际案例,详解如何解决312.5MHz数据通道的Setup违例问题,并分享DDR4接口调试中DQS-DQ对齐的实用技巧,为高速数据采集系统提供可靠的时序收敛方法论。
实时音频处理中的上限检测滤波技术实践
在数字信号处理领域,信号限幅是保护音频链路的重要技术。其核心原理是通过动态控制信号幅度,防止ADC过载和数值溢出。从工程实践角度看,合理的限幅算法能在保持音质的同时确保系统稳定性。常见的软限幅技术采用非线性函数(如tanh)实现平滑过渡,相比硬限幅能显著减少失真。这类技术在实时音视频处理、语音通信系统等场景尤为关键,能有效应对麦克风爆音、环境噪声突变等典型问题。以音频预处理模块为例,结合自适应阈值和动态时间常数的设计方案,可使系统崩溃率降低90%以上。特别是在视频会议、K歌APP等对实时性要求高的应用中,上限检测滤波已成为必备的基础功能模块。
LangGraph智能体开发:架构设计与性能优化实践
智能体系统作为AI领域的重要分支,通过状态机模型实现复杂业务流程控制。其核心原理是将任务分解为离散状态节点,通过条件转移实现流程驱动。在工程实践中,结合语言模型与传统编程的混合架构能显著提升系统性能,其中LangGraph框架通过可视化状态转移设计大幅降低开发门槛。典型应用场景包括电商客服对话管理、技术支持助手等需要多轮交互的系统。本文重点解析了基于LangGraph的智能体记忆系统实现方案,包含短期记忆、长期记忆和工作记忆三层架构,并分享了将平均响应时间从2.3秒优化至0.8秒的实战技巧。
动态规划入门:爬楼梯问题解法与优化
动态规划是解决最优化问题的经典算法范式,其核心思想是通过存储子问题的解来避免重复计算。爬楼梯问题作为动态规划的经典案例,展示了从暴力递归到空间优化解法的完整演进过程。在算法设计与性能优化中,理解状态转移方程的建立与空间复杂度的权衡至关重要。该问题不仅与斐波那契数列存在数学关联,其解法思路也可应用于路径规划、资源分配等实际工程场景。通过分析递归解法O(2^n)与动态规划O(n)的时间复杂度差异,开发者能深入掌握算法优化的关键技术。
英飞凌TC3xx UCB配置实战:安全启动与Flash保护详解
微控制器配置(UCB)是嵌入式系统开发中的关键技术,直接影响芯片启动流程和硬件安全机制。在汽车电子等安全关键领域,UCB通过预编程存储区域实现启动模式选择、时钟配置和Flash保护等功能,其'写一次'特性要求开发者必须精准掌握校验和计算与位域配置原理。以英飞凌AURIX TC3xx系列为例,UCB_BMHD配置决定BootROM行为,而UCB_PFLASH则关系到程序存储区的安全防护。合理配置HSM安全启动链和双Bank切换机制,能有效提升系统可靠性和OTA更新能力。工程师需要特别注意UCB的不可逆特性,结合MemTool等专业工具进行量产前的自动化校验。
ESP32低功耗优化实战:Light Sleep模式深度解析
物联网设备开发中,低功耗设计是延长电池寿命的关键技术。ESP32作为主流物联网芯片,其电源管理系统支持多种休眠模式,其中Light Sleep模式通过暂停CPU运行、关闭射频模块,可将电流降至0.8mA级别。这种技术通过RTC定时器、外部中断等唤醒机制,在保持设备响应能力的同时显著降低功耗。在农业传感器等电池供电场景中,配合ULP协处理器和GPIO状态优化,可实现200天以上的超长续航。本文以实际项目为例,详解如何通过硬件选型、软件配置和外围电路改造,将ESP32的功耗从85mA优化至0.4mA,续航提升达200倍。
光伏储能系统虚拟同步机控制技术解析
虚拟同步机(VSG)技术通过算法模拟同步发电机特性,使新能源逆变器具备惯性和阻尼支撑能力,是解决高比例可再生能源并网挑战的关键技术。其核心原理在于建立包含虚拟惯量、阻尼系数的转子运动方程,配合储能系统的快速功率响应,可有效平抑电网频率波动。在工程实践中,VSG技术常与光伏储能系统结合,通过直流母线电容设计、SOC智能管理等手段,实现调频响应时间小于200ms、弃光率降低至3%以下的优异性能。该技术特别适用于新能源渗透率超过30%的区域电网,能显著提升系统稳定性和电能质量。
坐标系转换技术:从LLA到发射系的数学原理与实现
坐标系转换是空间数据处理的基石技术,涉及大地坐标系(LLA)、地心地固坐标系(ECEF)和局部坐标系(ENU/NED)之间的数学映射。其核心原理是通过旋转矩阵实现不同参考系间的向量变换,关键技术包括WGS84椭球模型计算和方位角旋转。在工程实践中,该技术对导航定位精度有决定性影响,广泛应用于导弹制导、无人机航迹规划等场景。特别是在武器系统中,即使0.1度的转换误差也可能导致数百米的落点偏差。通过Python实现示例可见,正确处理ECEF到ENU的旋转矩阵以及发射系定义是关键,同时需要注意高度基准和角度单位等常见陷阱。
FPGA UART通信模块设计与回环验证实战
UART(通用异步收发器)是嵌入式系统中广泛使用的串行通信协议,其核心原理是通过起始位、数据位和停止位实现异步数据传输。在FPGA开发中,UART模块设计需要解决的关键技术问题包括16倍过采样、多数表决机制和状态机控制。通过Verilog硬件描述语言实现时,需要注意双拍同步、下降沿检测等基础电路设计技巧,这些技术能有效提高通信稳定性。在实际工程中,UART模块常面临上电自检风暴、引脚约束错误等典型问题,本文通过多路UART控制器的回环验证案例,展示了如何通过硬件直连等方案解决实际问题。该案例对FPGA初学者理解UART通信原理和调试方法具有重要参考价值。
RK3588与ES8388音频PCM接口配置与调试指南
PCM(脉冲编码调制)是数字音频系统中常用的接口标准,通过时钟同步实现音频数据的精确传输。其核心原理涉及主时钟(MCLK)、位时钟(BCLK)和帧时钟(LRCLK)的协同工作,确保采样率、位宽和通道数的正确匹配。在嵌入式音频开发中,PCM接口配置直接影响音频质量,常见的I2S模式需要特别注意时钟分频和电源管理。以RK3588平台与ES8388编解码器为例,通过设备树配置时钟参数、驱动层设置工作模式,并结合ALSA工具进行调试,可解决杂音、断音等典型问题。该方案适用于智能音箱、车载音频等需要高保真音质的嵌入式场景,实测THD+N指标可达0.003%以下。
责任链模式解析:从多级审批到事件处理
责任链模式是面向对象设计中经典的行为型模式,通过将多个处理对象连接成链来实现请求的传递与处理。该模式的核心价值在于解耦请求发送者与接收者,典型实现包含Handler基类和多个ConcreteHandler。在工程实践中,责任链模式广泛应用于多级审批系统、异常处理机制和事件冒泡等场景,支持动态链修改和短路处理等高级特性。通过智能指针管理内存和避免循环引用等优化手段,可以构建高效稳定的处理流程。与拦截过滤器等变体结合使用时,能灵活应对Web框架等复杂业务场景的需求变化。
嵌入式硬件基础:从元器件到系统设计的核心知识
嵌入式系统开发是软件与硬件紧密结合的领域,理解电子元器件的工作原理是构建稳定系统的基石。电阻、电容、电感等被动元件构成了电路的基础架构,而二极管、三极管、MOSFET等半导体器件则实现了智能控制功能。在嵌入式硬件设计中,电源管理、信号完整性和接口通信是三大关键技术方向。以STM32等常见MCU平台为例,合理的GPIO配置、UART通信实现以及I2C/SPI总线应用都离不开对这些基础概念的掌握。通过系统学习硬件知识,开发者能够有效避免90%的典型电路问题,提升嵌入式产品的可靠性和性能表现。
基于MPC的多车队列协同控制联合仿真实践
模型预测控制(MPC)作为现代控制理论的重要分支,通过在线求解约束优化问题实现对多变量系统的精确调控。其核心价值在于能够同时处理系统约束与多目标优化,特别适合智能交通中的车辆协同控制场景。在工程实现层面,Matlab/Simulink与Trucksim的联合仿真方案,既保留了算法开发的灵活性,又通过高保真车辆动力学模型确保仿真可信度。实际测试表明,在80km/h巡航工况下,采用MPC的3车队列系统相比传统PID控制可降低12%-15%的燃油消耗,同时显著提升行驶安全性与舒适性。这种硬件在环(HIL)仿真方法,为智能车队控制算法的快速验证提供了高效解决方案。
STM32双DMA技术实现8轴高精度运动控制
多轴运动控制是工业自动化的核心技术,其关键在于实现高精度、高同步性的轴间协同。DMA(直接内存访问)技术通过硬件级数据传输,能显著降低CPU负载,提升系统实时性。结合定时器的精确触发机制,可构建高效的脉冲输出系统。在STM32等MCU平台上,双DMA架构配合流水线技术,能实现8轴500kHz的高频脉冲输出,满足数控机床、工业机器人等场景的严苛要求。通过预计算加速、定点数优化等算法手段,进一步提升了多轴插补的实时性能。这种硬件加速与软件优化相结合的方法,为复杂运动控制系统提供了可靠解决方案。
CUDA内存管理:cudaMalloc与cudaFree核心解析
在GPU并行计算中,高效的内存管理是性能优化的关键。CUDA作为主流的GPU计算平台,其内存模型与CPU存在显著差异,主要分为主机内存和设备内存。设备内存(显存)通过cudaMalloc和cudaFree进行管理,这两个API是CUDA编程的基础。理解其工作原理对于避免内存泄漏、提升程序性能至关重要。在实际应用中,合理使用设备内存可以显著加速计算密集型任务,如图像处理、深度学习等。本文深入解析cudaMalloc和cudaFree的使用技巧,帮助开发者掌握CUDA内存管理的核心要点。
CANN oam-tools:AI设备监控与性能优化实战
在AI计算领域,设备监控是保障大规模训练稳定性的关键技术。通过硬件级性能计数器(如AICore利用率、HBM带宽)和实时健康指标(温度、功耗)采集,可以构建精准的设备状态画像。CANN oam-tools作为专为昇腾芯片设计的监控套件,采用DCMI接口实现用户态与内核的高效交互,支持Prometheus协议集成。其核心价值在于将硬件故障定位时间从小时级缩短到分钟级,同时通过性能数据分析指导模型训练优化。典型应用场景包括:实时预警芯片过热风险、诊断HBM带宽瓶颈、优化AI计算资源利用率等。
AD软件PCB设计常见问题与高效解决方案
PCB设计是电子工程中的核心环节,Altium Designer作为行业主流工具,其使用技巧直接影响设计效率。本文从元件操作、视图显示、铺铜处理等维度,剖析AD软件常见问题的技术原理与解决方案。针对元件引脚脱落问题,揭示坐标系统浮点精度误差的本质;在视图异常场景中,解析DirectX渲染引擎的底层机制;通过DRC错误分析,阐述设计规则与铺铜算法的交互逻辑。这些方案不仅解决具体问题,更提供PCB设计的工程化思维,适用于消费电子、工业控制等领域的硬件开发。
已经到底了哦
精选内容
1 农业植保无人机开发实战:从硬件选型到飞控定制2 虚拟同步发电机(VSG)自适应控制策略解析3 P104/P106显卡驱动魔改与计算性能优化指南4 基于Matlab代码生成的永磁同步电机控制开发实践5 SP4574锂电池SOC精准监测方案与优化实践6 基于STC12C5A60S2的高精度数字电压表设计与实现7 FPGA实现Robert边缘检测的Verilog设计与优化8 永磁同步电机死区效应补偿与Simulink仿真实践9 ESP32-CAM烧录故障排查与驱动修复指南10 CIX P1与OpenClaw:边缘AI视觉开发实战指南
热门内容
1 FOC双轴伺服驱动:高精度电机控制与协同方案2 高频注入FOC方案在无感PMSM控制中的应用与优化3 直流电机双闭环调速系统设计与调试实战4 APM32F425 SPI+DMA驱动MT6835编码器实战5 电子信号基础参数解析与工程应用指南6 永磁同步发电机先进控制策略与Simulink仿真实践7 智能硬件App架构设计:Android MVVM与双模通信优化实践8 从C语言到嵌入式开发:电子信息专业学习路线9 无人机轨迹规划:双旋翼动力学模型与MATLAB实现10 电动汽车Simulink仿真建模与性能优化实践
最新内容
Qt与Halcon图像显示集成方案详解
在工业视觉开发中,图像处理算法与用户界面的高效集成是关键挑战。Halcon作为专业的机器视觉库提供强大的图像处理能力,而Qt框架则擅长构建跨平台GUI应用。通过建立HObject到QPixmap的数据转换通道,开发者可以充分发挥Halcon的算法优势,同时利用Qt图形视图框架实现丰富的交互功能。这种技术方案特别适用于需要实时图像处理和可视化操作的场景,如工业检测、医疗影像等领域。核心实现涉及图像数据格式转换、内存管理优化以及Qt GraphicsView体系的自定义扩展,其中正确处理多通道图像转换和实现流畅的大图像显示是工程实践中的重点难点。
ESP32串口通信配置与优化实战指南
UART(通用异步收发传输器)是嵌入式系统中实现设备间通信的基础接口技术,其工作原理基于串行数据传输和时钟同步机制。在物联网设备开发中,ESP32芯片凭借其双核架构和丰富的外设资源,成为UART通信的理想平台。通过精确配置波特率、数据位和校验位等参数,开发者可以构建稳定的串行通信链路。针对工业物联网场景中的高可靠性需求,结合DMA传输和硬件流控技术能有效解决数据丢失和缓冲区溢出等典型问题。本文以ESP-IDF框架为例,详细解析如何通过寄存器级操作实现多任务环境下的线程安全访问,并给出在2Mbps高速通信场景下的实测优化方案。
校招技术面试备考策略与高频考点解析
数据结构与算法是计算机科学的核心基础,其中链表、树结构和动态规划等经典问题在工程实践中具有广泛应用价值。理解这些数据结构的底层原理和算法思想,能够帮助开发者优化系统性能、解决复杂业务场景问题。在技术面试尤其是大厂校招中,算法能力与工程实践的结合成为重要考察维度,不同业务场景会侧重不同技术栈,如腾讯注重网络协议、阿里关注分布式系统。掌握LRU缓存实现、K个一组翻转链表等高频题型,结合目标公司技术栈特点进行针对性准备,是提升面试通过率的关键策略。
C++字符数组详解:初始化、操作与优化技巧
字符数组是C/C++中处理文本数据的基础数据结构,其本质是连续存储的char类型元素集合。从内存布局来看,字符数组以'\0'作为终止符,既能存储字符集合也能作为字符串使用。在工程实践中,字符数组常用于日志系统、配置参数存储等场景,相比string类具有内存布局明确、无动态分配开销等优势。通过strlen、strcmp等字符串处理函数,开发者可以高效实现长度计算、比较等操作。在性能优化方面,合理使用指针遍历、内存对齐等技巧能显著提升处理效率。对于缓冲区溢出等安全隐患,应采用strncpy等安全函数并做好边界检查。
基于Arduino的智能蘑菇培养箱系统设计与实现
物联网技术在农业领域的应用正逐步改变传统种植模式。通过传感器网络实时采集环境参数,结合自动控制算法,可以精确调控温湿度、光照等生长要素。Arduino作为开源硬件平台,凭借其丰富的IO接口和成熟的生态系统,成为构建智能农业系统的理想选择。本方案采用模块化设计思路,集成DHT11温湿度传感器、YL-69土壤湿度传感器等检测设备,通过ESP8266实现无线数据传输,构建了一套完整的智能蘑菇培养系统。该系统不仅解决了传统种植中环境监测不精确、响应滞后等问题,还通过移动端应用实现了远程监控,为精准农业提供了可复用的技术框架。
WIZnet Port模块选型与应用指南
嵌入式网络通信中,以太网连接模块是实现设备联网的关键组件。WIZnet Port模块通过集成TCP/IP协议栈硬件芯片,大幅简化了网络协议实现难度。这类模块的核心技术原理包括网络接口类型选择(如RJ45、WiFi)、协议栈支持(TCP/IP、UDP等)以及功耗管理。在工业控制和智能家居等应用场景中,模块的选型直接影响系统性能和成本。以W5500和WizFi360为例,前者提供93Mbps稳定有线连接,后者则支持72Mbps无线传输,开发者需根据布线条件和移动性需求进行选择。合理选型能优化智能电表、PLC等项目的开发周期和可靠性。
CANoe仿真工程转让:车载网络测试实战指南
车载网络测试是汽车电子开发中的关键环节,其核心在于构建高可靠性的通信验证环境。CANoe作为行业标准工具,通过DBC总线数据库定义、CAPL测试脚本和硬件接口配置实现自动化测试。成熟的仿真工程转让能显著提升测试效率,典型应用场景包括ECU功能验证、网络管理测试和自动化测试平台搭建。本文详解工程中的总线数据库配置、测试用例设计及验收要点,特别针对信号映射规则、硬件兼容性等热词展开分析,并给出Python集成CANoe的工程实践方案。
三菱FX PLC与台达变频器Modbus RTU通讯控制方案
Modbus RTU是工业自动化领域广泛应用的串行通讯协议,采用主从架构实现设备间数据交换。其技术原理基于RS485物理层,通过功能码和寄存器地址访问设备参数,具有布线简单、抗干扰强的特点。在PLC控制系统中,Modbus协议常用于连接变频器、仪表等智能设备,实现集中监控与参数调整。本文以三菱FX1N PLC与台达VFD-M变频器为例,详细解析硬件连接、参数配置及程序开发要点,提供包含频率设定、状态监控、启停控制的完整解决方案。该方案采用标准化Modbus RTU协议,通过485BD通讯模块实现稳定数据传输,配套触摸屏界面简化操作流程,可直接应用于生产线改造等工业场景。
Linux下C语言开发环境搭建与基础编程指南
C语言作为系统编程的核心语言,在Linux环境下具有得天独厚的优势。通过GCC编译器工具链,开发者可以将C源代码转换为高效的可执行程序,这一过程涉及预处理、编译、汇编和链接四个关键阶段。掌握Linux下的C开发不仅能够深入理解计算机系统底层原理,还能为嵌入式开发、操作系统内核编程等领域打下坚实基础。本文以Ubuntu为例,详细介绍了从vim编辑器配置、GCC编译器使用到GDB调试技巧的全套开发环境搭建方法,并通过Hello World示例演示了完整的开发流程。对于初学者而言,理解Linux文件操作、进程控制等系统编程接口,是进阶学习网络编程、多线程开发的重要基石。
Linux SPI子系统架构与驱动开发实战指南
SPI(Serial Peripheral Interface)是嵌入式系统中广泛使用的同步串行通信协议,通过主从架构实现设备间高速数据交换。其工作原理基于四线制(SCK、MOSI、MISO、CS)和时钟极性与相位配置,支持全双工通信。在Linux内核中,SPI子系统采用分层设计,包含核心层、控制器驱动和设备驱动三个关键组件,通过spi_device、spi_transfer等数据结构实现硬件抽象。该技术广泛应用于传感器、存储设备、显示屏等外设连接,特别是在物联网和嵌入式Linux开发领域。以Linux-4.9.88 LTS版本为例,其SPI子系统经过深度优化,支持DMA传输、多主设备仲裁等高级特性,为开发者提供了spidev接口等实用工具,大幅降低了SPI设备驱动开发门槛。