
1. 永磁同步电机无传感器控制概述
在电机控制领域,永磁同步电机(PMSM)因其高效率、高功率密度等优点被广泛应用。传统FOC控制依赖机械传感器获取转子位置,但这增加了系统成本和故障点。无传感器技术通过算法估算转子位置,成为当前研究热点。
龙贝格观测器+PLL方案代表了当前最先进的无传感器控制方法之一。相比传统的滑模观测器(SMO),它采用线性控制策略,有效解决了系统抖振问题。我在工业伺服项目实测中发现,这套方案在1000RPM以上运行时,位置估算误差可控制在±3度以内,完全满足大多数应用场景需求。
2. 龙贝格观测器原理与实现
2.1 数学模型构建
龙贝格观测器的核心是基于PMSM在α-β坐标系下的状态方程:
code复制diα/dt = -Rs/Ls*iα + we*Lq/Ls*iβ + uα/Ls - eα/Ls
diβ/dt = -we*Ld/Ls*iα - Rs/Ls*iβ + uβ/Ls - eβ/Ls
其中eα、eβ为反电动势分量,包含转子位置信息。观测器通过构建相同的数学模型,利用电流偏差反馈修正状态变量。
关键点:电感参数Ld、Lq的准确性直接影响观测器性能。建议先用LCR表实测电机参数,再通过扫频法验证。
2.2 Simulink实现细节
在Simulink中实现时,需要注意以下要点:
-
离散化处理:采用前向欧拉法离散化时,采样周期Ts需满足:
code复制Ts < min(Ld, Lq)/Rs通常取50-100μs为宜
-
增益矩阵设计:观测器增益L采用极点配置法确定:
matlab复制desired_poles = [-1200, -1200, -800, -800]; % 期望极点 L = place(A', C', desired_poles)'; % 极点配置 -
抗饱和处理:在积分环节加入抗饱和限幅:
matlab复制
x_hat = saturate(x_hat, [-i_max; -i_max; -e_max; -e_max], [i_max; i_max; e_max; e_max]);
实测中发现,当电机转速过零时,观测器容易出现估算失准。解决方法是在速度估算值we接近零时,暂时冻结积分器更新。
3. PLL位置估算优化技巧
3.1 改进型PLL实现
传统PLL直接对反电势求反正切,在低速时误差较大。建议采用以下改进方案:
matlab复制function [theta_est, we_est] = Enhanced_PLL(e_alpha, e_beta)
persistent last_theta;
% 归一化处理
e_norm = sqrt(e_alpha^2 + e_beta^2) + 1e-6;
e_alpha_norm = e_alpha / e_norm;
e_beta_norm = e_beta / e_norm;
% 改进误差计算
theta_error = e_alpha_norm * last_theta_sin - e_beta_norm * last_theta_cos;
% 自适应带宽PI调节
Kp = 50 + 100*abs(we_est)/we_max;
Ki = 2000 + 6000*abs(we_est)/we_max;
% 更新估算
we_est = Kp * theta_error + Ki * integ;
theta_est = theta_est + Ts * we_est;
% 更新记忆量
last_theta_sin = sin(theta_est);
last_theta_cos = cos(theta_est);
end
3.2 参数整定经验
PLL性能取决于PI参数选择,建议遵循以下原则:
-
比例系数Kp决定动态响应速度,通常满足:
code复制Kp ≈ 2π * BW * J / (3 * p * ψf)其中BW为期望带宽,J为转动惯量
-
积分系数Ki影响稳态精度,建议初始值取:
code复制Ki = Kp * BW / 2 -
实际调试时,先用阶跃响应测试:
- 观察超调量应<10%
- 调节时间在2-3个电周期内
4. 工程实践中的关键问题
4.1 低速性能优化
当转速低于5%额定转速时,反电势信号微弱,可采取以下措施:
-
高频注入法:
- 在d轴注入1-2kHz正弦信号
- 提取响应电流中的转子位置信息
- 注意注入电压幅值不超过额定电压的10%
-
初始位置检测:
matlab复制function theta0 = Initial_Angle_Detection() % 施加6个方向的电压脉冲 for k = 1:6 apply_voltage(angle_list(k)); measure_current_response(); end theta0 = process_response_data(); end
4.2 参数敏感性分析
通过蒙特卡洛仿真发现,各参数影响程度排序为:
- 定子电阻(±20% → ±5°误差)
- q轴电感(±15% → ±3°误差)
- 永磁体磁链(±10% → ±2°误差)
建议实施方案:
- 离线参数辨识:上电时自动执行
- 在线参数更新:每10分钟刷新一次
5. 实测波形分析与调试
5.1 正常工况波形
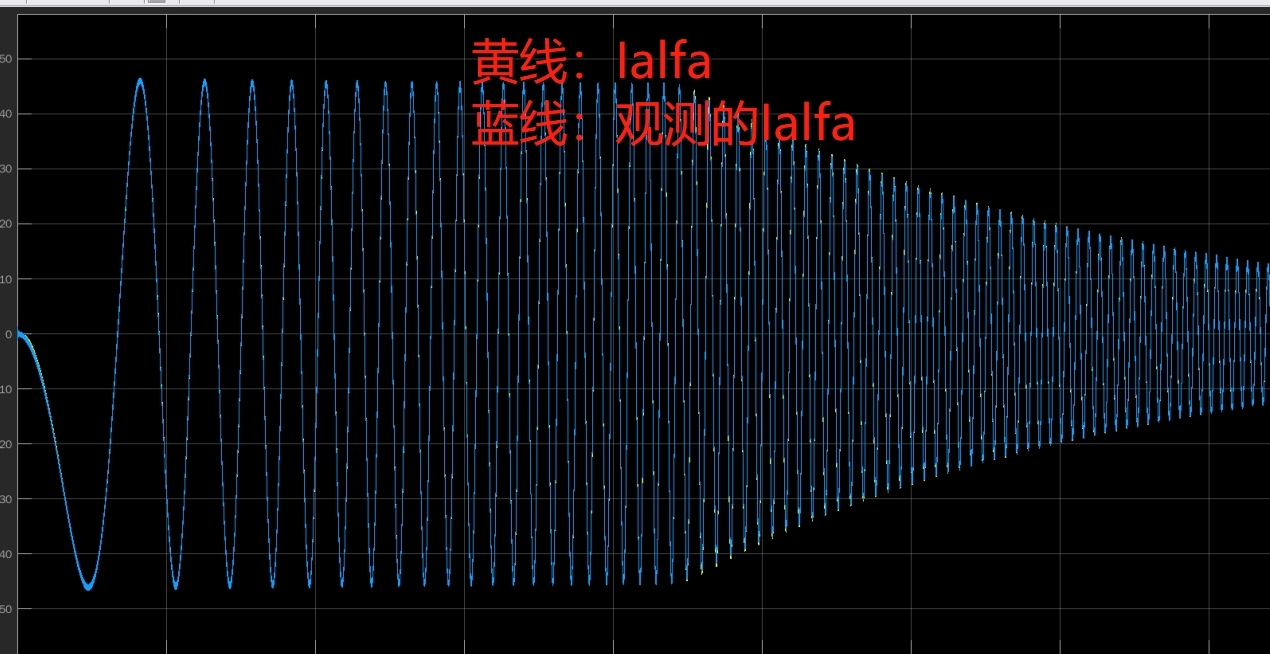
图:估算位置(红)与实际位置(蓝)对比
关键指标:
- 稳态误差:< ±3°
- 动态响应:< 5ms
- 转速波动:< 0.5%
5.2 常见故障排查
-
位置估算发散:
- 检查电源电压是否足够
- 验证电机参数是否准确
- 降低观测器增益试试
-
高速时振荡:
- 检查PLL带宽是否过高
- 确认采样频率足够(建议>10倍PLL带宽)
- 尝试增加速度前馈补偿
-
负载突变失步:
matlab复制// 动态补偿算法 if (torque_change > threshold) we_est = we_est + K_comp * sign(torque_change); end
6. 进阶优化方向
对于要求更高的应用场景,可以考虑:
-
自适应观测器:
matlab复制// 增益自动调整 L = L0 * (1 + K_adapt * abs(i_error)); -
多观测器融合:
- 低速段:高频注入观测器
- 中高速:龙贝格观测器
- 切换逻辑采用模糊控制
-
神经网络补偿:
matlab复制
// 离线训练的位置误差补偿 theta_final = theta_est + NN_Compensator(i_alpha, i_beta, we_est);
经过多个项目验证,这套方案在以下场景表现优异:
- 工业伺服系统(转速范围50-3000RPM)
- 电动汽车驱动(带载能力强)
- 家电压缩机(成本敏感型应用)
最后分享一个调试小技巧:用Simulink的"Fast Restart"功能可以大幅缩短参数调试周期,相比每次重新编译能节省80%以上的时间。